
主要思想是利用卷积神经网络来处理激光雷达捕获的点云数据,并对点云中的目标进行识别。深度学
习是数据驱动的,它把人工构造特征这一任务交给机器和算法去完成(即特征学习)。在百度的深度
学习感知实现过程中,团队尝试了很多方法,下面就简单介绍算法研发的历程。
1、将所有点云都投到前视图(front-view)(投影面是一个圆柱面)来构造特征,将点云问题转化
为矩阵问题,进而使用深度学习进行处理。通过构建全卷积神经网络对前向视图进行处理。
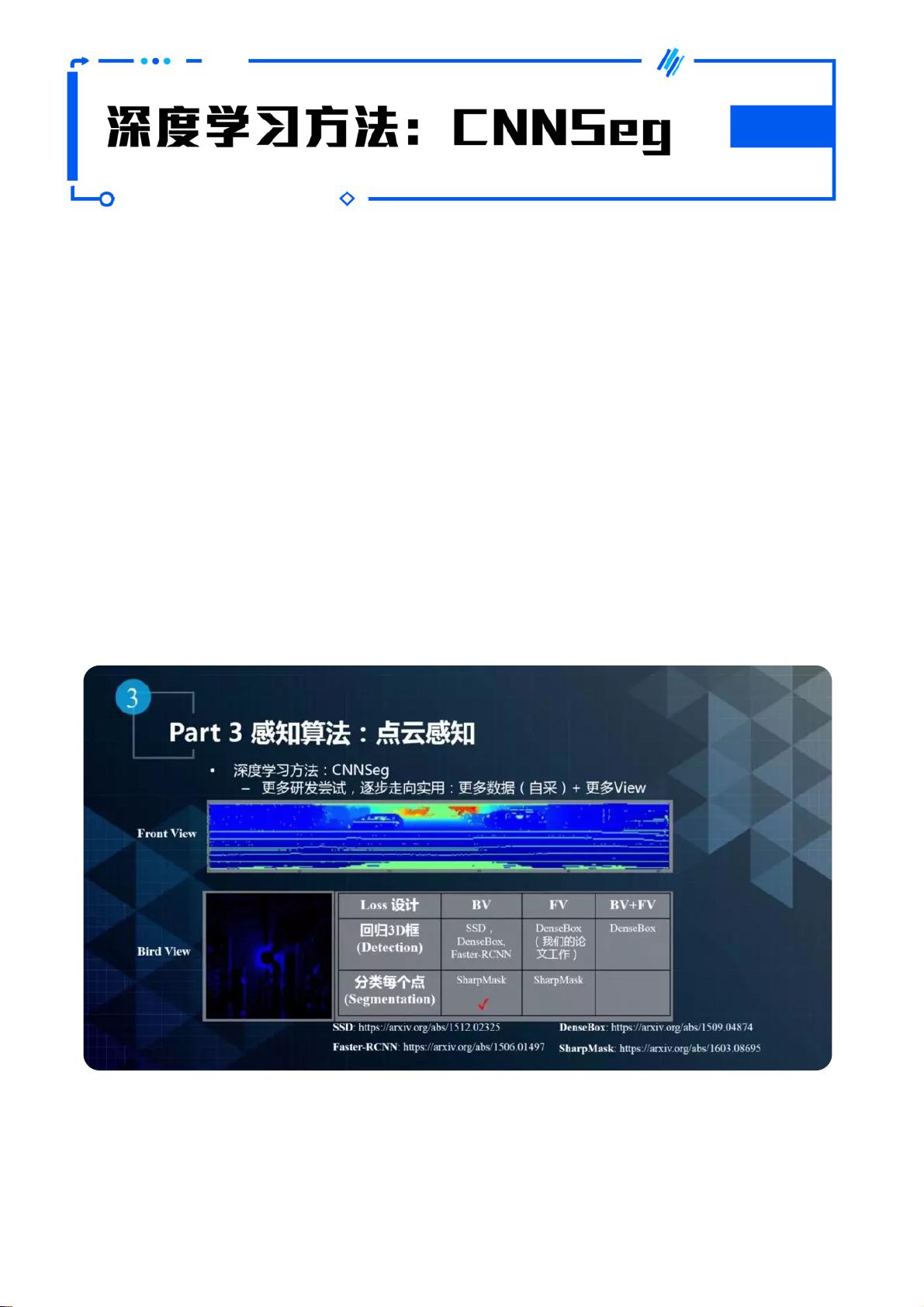
2、借助自采集车队,采集更多的实际数据,并且扩展数据视角,制作俯视图,通过将俯视图+前视
图相结合的方式进行训练。同时,修改Loss函数,包括使用3D回归和Segmentation的损失函数。
经过多次实验,发现基于俯视图的Segmentation方法效果最好。该方法目前已经在Apollo中开源,
如下所示。
▲基于俯视图的Segmentation方法
3、因为俯视图没有高度信息,因此我们把前视图和Camara图像加进来进行辅助检查,利用Lidar的
测 距 准 和 Camera 识 别 准 优 势 完 成 了 Middle-Level Fusion 方 法 ( Multi-View 3D Object
剩余11页未读,继续阅读

疯狂的机器人
- 粉丝: 8873
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


