INPHO软件空三加密与DOM制作全攻略
"该资源是关于INPHO软件的详细操作教程,涵盖了空三加密(航测内定向)和数字正射影像(DOM)制作的全流程。教程通过图文结合的方式,指导用户如何从新建工程、建立相机文件、导入影像数据、设置飞行区域高度、导入GPS导航数据,到最后完成像片控制点的导入和导航数据配置。"
INPHO软件是专业用于遥感影像处理的工具,特别在航空摄影测量领域有着广泛的应用。在空三加密过程中,它是通过计算影像间的相对位置关系,精确确定每张影像的内定向参数,包括主点坐标、焦距等,以消除影像的几何畸变。以下是INPHO软件操作的关键步骤:
1. 新建工程:启动软件后,首先创建新的工程文件,这是整个流程的基础。
2. 建立相机文件:定义相机参数,包括相机名称、类型、镜头类型,并根据检校文件填写相应的光学参数,如畸变系数,确保计算的准确性。
3. 导入影像数据:选择影像数据的导入方式,定位影像存放的文件夹,并设置飞行区域的平均地面高度,这将影响后续的几何纠正。
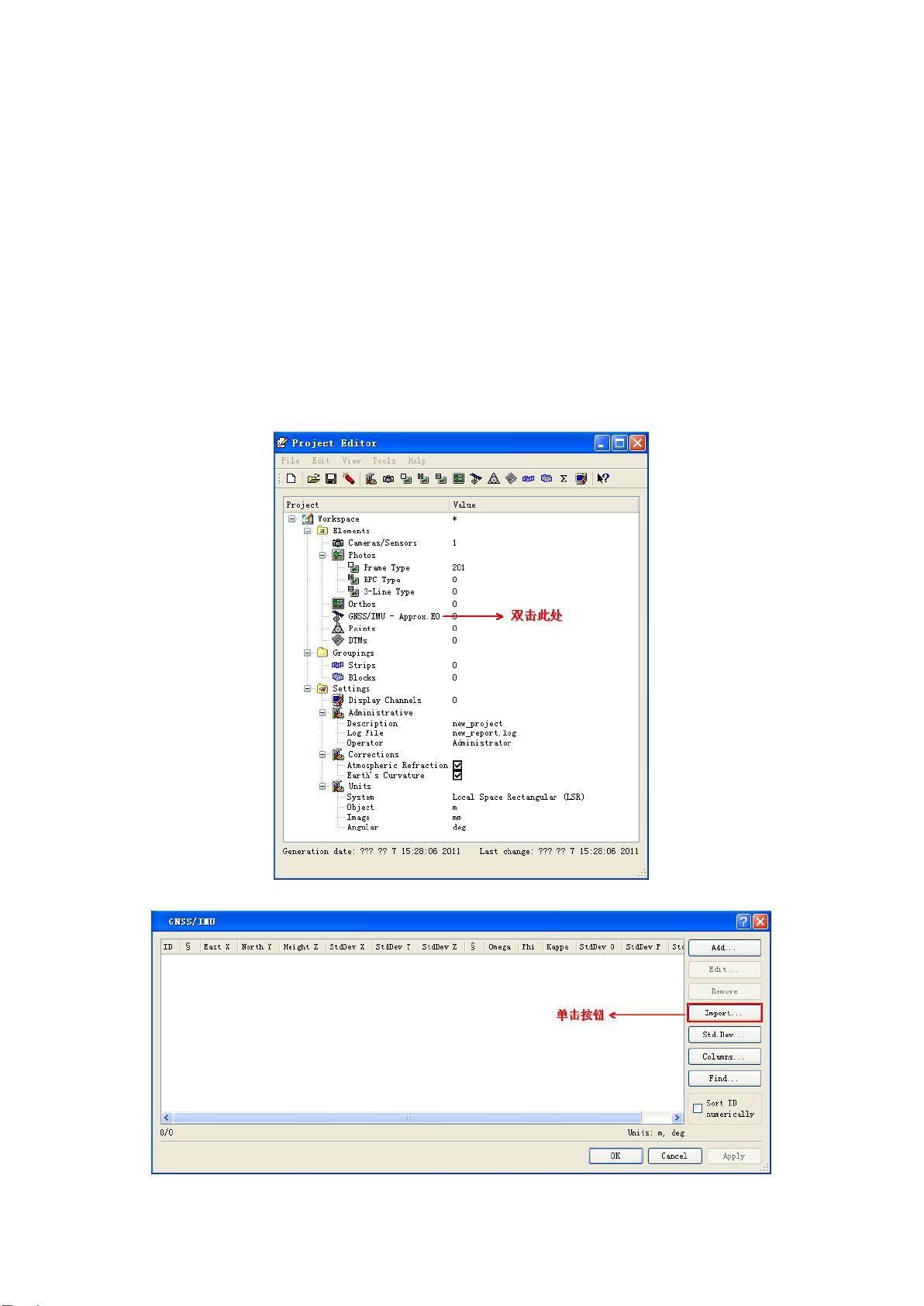
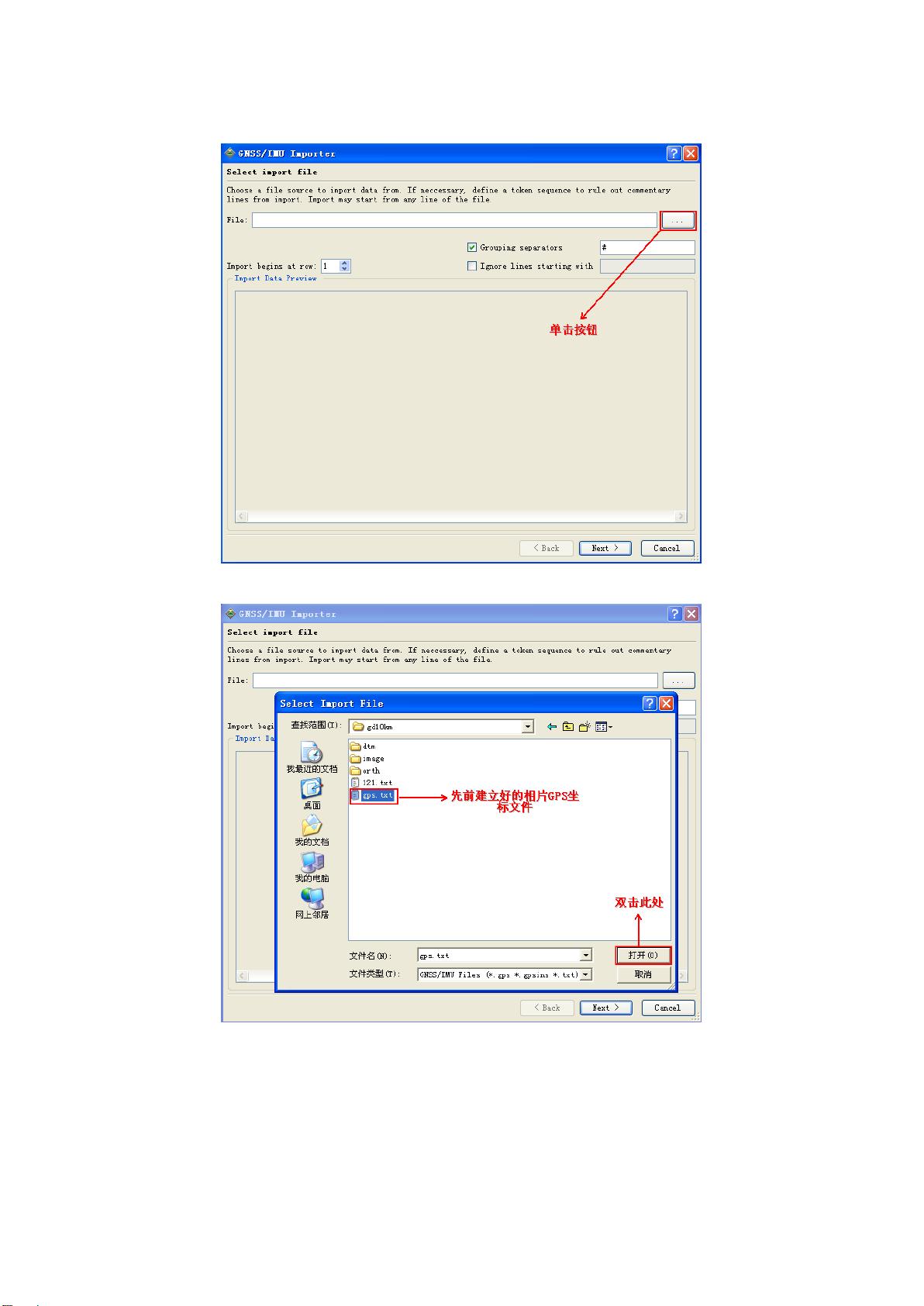
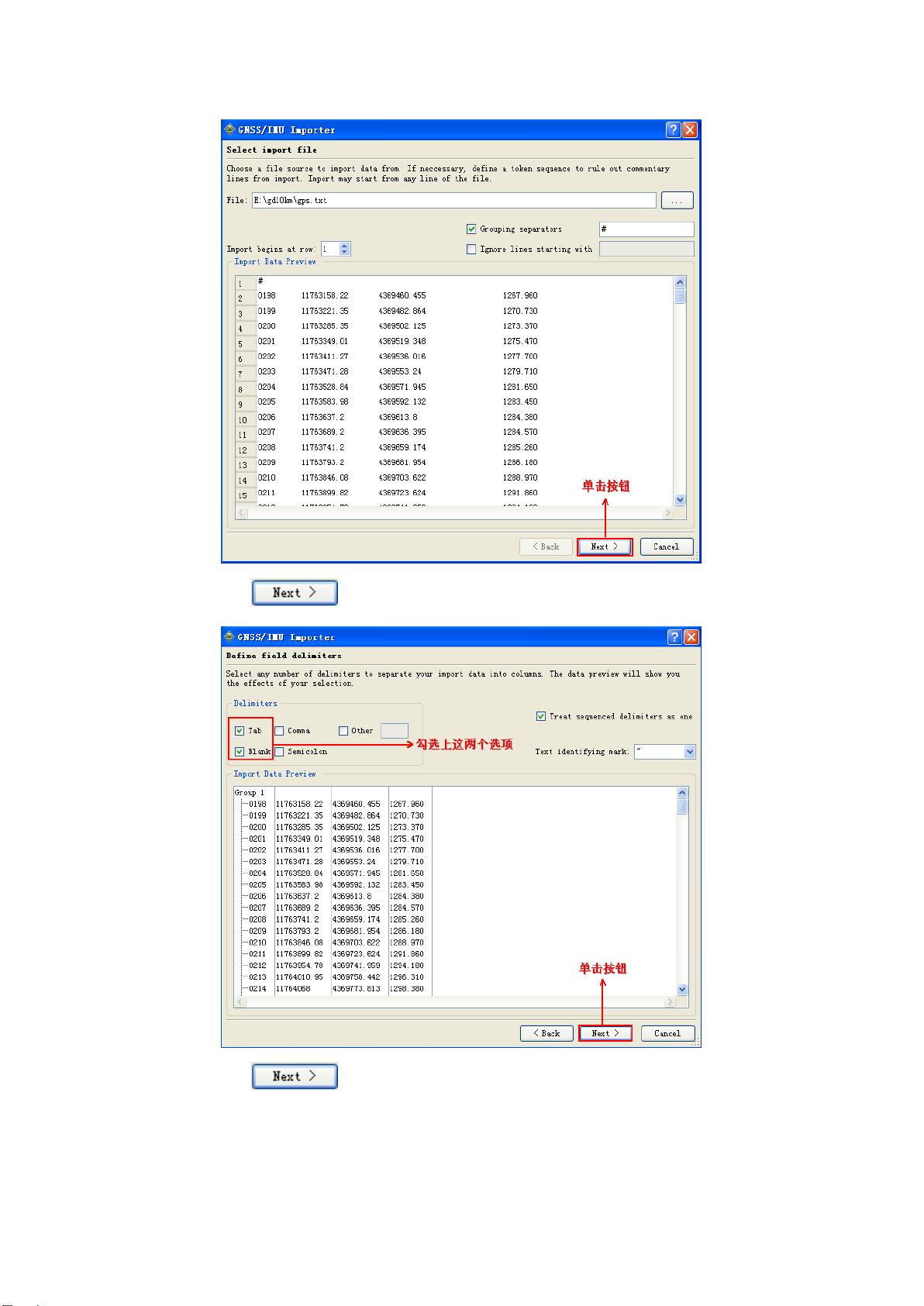
4. 导入GPS导航数据:对于有GPS数据的航测,需要将航片的XYZ坐标导入,以便进行更精确的定位。如果使用GPS辅助摄影,还需按照特定格式导入相关数据。
5. 配置导航数据:与影像序号匹配,设置限差值,确保数据的精度和可靠性。
像片控制点的导入也是空三加密过程中的关键环节,它有助于提高空三解算的精度。用户需要将实地测量的控制点坐标与影像上的像素坐标对应起来,进一步校准和优化模型。
DOM的制作则是在空三加密基础上,通过正射纠正,将倾斜影像转换成无透视变形的正射影像,通常用于地图制作或地理信息系统应用。整个流程涉及大量的参数设置和数据匹配,需要仔细操作并根据实际需求调整。
本教程详细地介绍了INPHO软件的使用,适合初次接触或需要深入学习INPHO操作的用户。通过学习,用户可以掌握从数据预处理到成果输出的完整工作流程,提升在航空摄影测量领域的专业技能。
9
# /航带分隔符
11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标
12 x12 y12 z12
#
21 x21 y21 z21
22 x22 y22 z22
#
⋯ ⋯ ⋯ ⋯
#
如果是GPS辅助摄影,按
photoID px py pz omega phi kappa
顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处
双击后弹出下图的窗口
剩余52页未读,继续阅读
2019-11-25 上传
点击了解资源详情
点击了解资源详情
2021-12-16 上传
2012-12-29 上传
2022-12-23 上传
2021-12-05 上传

xingkongxing01
- 粉丝: 8
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- AA4MM开源软件:多建模与模拟耦合工具介绍
- Swagger实时生成器的探索与应用
- Swagger UI:Trunkit API 文档生成与交互指南
- 粉红色留言表单网页模板,简洁美观的HTML模板下载
- OWIN中间件集成BioID OAuth 2.0客户端指南
- 响应式黑色博客CSS模板及前端源码介绍
- Eclipse下使用AVR Dragon调试Arduino Uno ATmega328P项目
- UrlPerf-开源:简明性能测试器
- ConEmuPack 190623:Windows下的Linux Terminator式分屏工具
- 安卓系统工具:易语言开发的卸载预装软件工具更新
- Node.js 示例库:概念证明、测试与演示
- Wi-Fi红外发射器:NodeMCU版Alexa控制与实时反馈
- 易语言实现高效大文件字符串替换方法
- MATLAB光学仿真分析:波的干涉现象深入研究
- stdError中间件:简化服务器错误处理的工具
- Ruby环境下的Dynamiq客户端使用指南
