
GhostNet: More Features from Cheap Operations
Kai Han
1
Yunhe Wang
1
Qi Tian
1∗
Jianyuan Guo
2
Chunjing Xu
1
Chang Xu
3
1
Noah’s Ark Lab, Huawei Technologies.
2
Peking University.
3
School of Computer Science, Faculty of Engineering, University of Sydney.
{kai.han,yunhe.wang,tian.qi1,xuchunjing}@huawei.com jyguo@pku.edu.cn c.xu@sydney.edu.au
Abstract
Deploying convolutional neural networks (CNNs) on em-
bedded devices is difficult due to the limited memory and
computation resources. The redundancy in feature maps
is an important characteristic of those successful CNNs,
but has rarely been investigated in neural architecture de-
sign. This paper proposes a novel Ghost module to gener-
ate more feature maps from cheap operations. Based on
a set of intrinsic feature maps, we apply a series of linear
transformations with cheap cost to generate many ghost
feature maps that could fully reveal information underlying
intrinsic features. The proposed Ghost module can be taken
as a plug-and-play component to upgrade existing convo-
lutional neural networks. Ghost bottlenecks are designed
to stack Ghost modules, and then the lightweight Ghost-
Net can be easily established. Experiments conducted on
benchmarks demonstrate that the proposed Ghost module is
an impressive alternative of convolution layers in baseline
models, and our GhostNet can achieve higher recognition
performance (e.g.
75.7%
top-1 accuracy) than MobileNetV3
with similar computational cost on the ImageNet ILSVRC-
2012 classification dataset. Code is available at
https:
//github.com/huawei-noah/ghostnet.
1. Introduction
Deep convolutional neural networks have shown excellent
performance on various computer vision tasks, such as image
recognition [
30
,
13
], object detection [
43
,
33
], and semantic
segmentation [
4
]. Traditional CNNs usually need a large
number of parameters and floating point operations (FLOPs)
to achieve a satisfactory accuracy, e.g. ResNet-50 [
16
] has
about
25.6
M parameters and requires
4.1
B FLOPs to pro-
cess an image of size
224 × 224
. Thus, the recent trend
of deep neural network design is to explore portable and
efficient network architectures with acceptable performance
for mobile devices (e.g. smart phones and self-driving cars).
∗
Corresponding author
HUAWEI TECHNOLOGIES CO., LTD.
Huawei Confidential
1
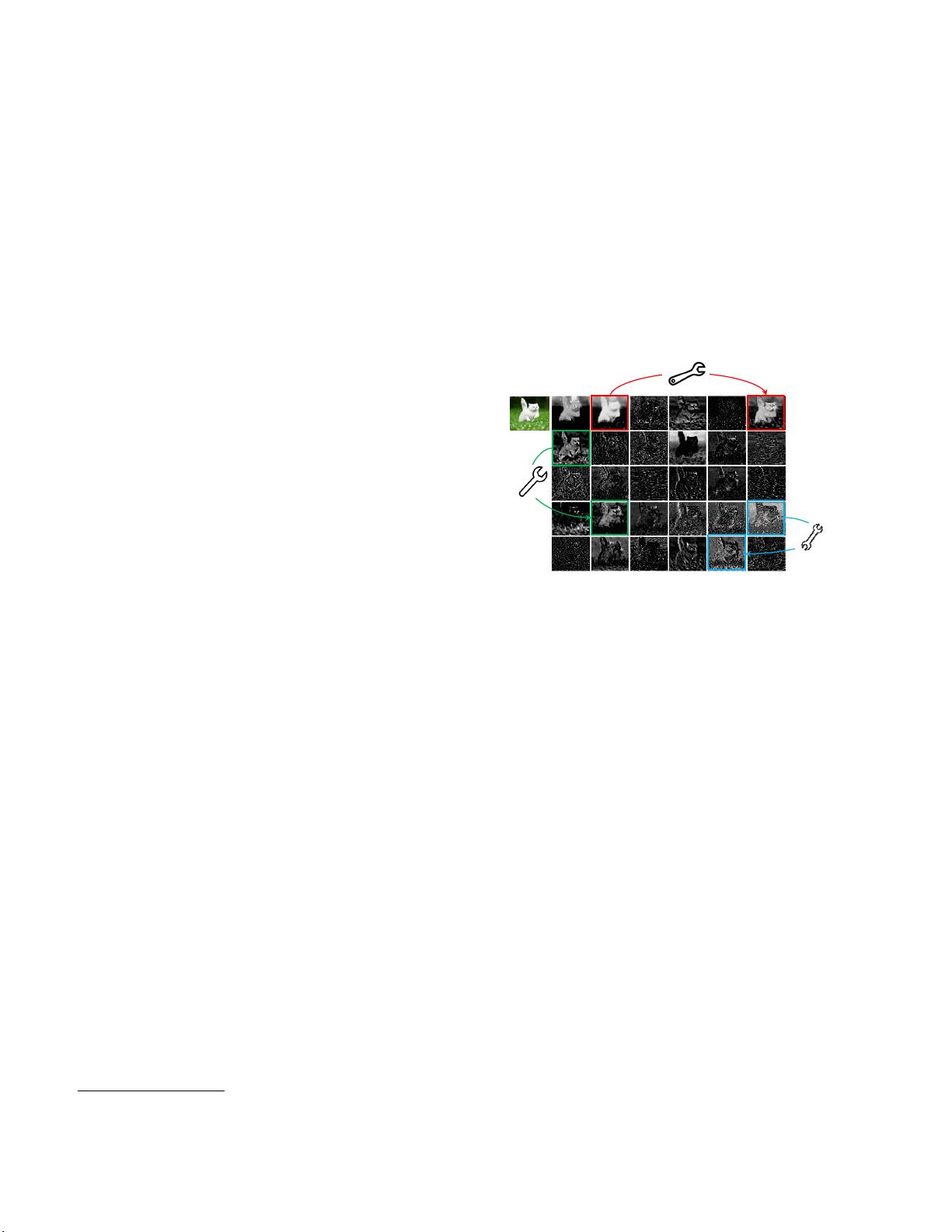
Figure 1. Visualization of some feature maps generated by the first
residual group in ResNet-50, where three similar feature map pair
examples are annotated with boxes of the same color. One feature
map in the pair can be approximately obtained by transforming the
other one through cheap operations (denoted by spanners).
Over the years, a series of methods have been proposed to
investigate compact deep neural networks such as network
pruning [
14
,
39
], low-bit quantization [
42
,
26
], knowledge
distillation [
19
,
57
], etc. Han et al. [
14
] proposed to prune
the unimportant weights in neural networks. [
31
] utilized
`
1
-norm regularization to prune filters for efficient CNNs.
[
42
] quantized the weights and the activations to 1-bit data
for achieving large compression and speed-up ratios. [
19
]
introduced knowledge distillation for transferring knowl-
edge from a larger model to a smaller model. However,
performance of these methods are often upper bounded by
pre-trained deep neural networks that have been taken as
their baselines.
Besides them, efficient neural architecture design has a
very high potential for establishing highly efficient deep net-
works with fewer parameters and calculations, and recently
has achieved considerable success. This kind of methods
can also provide new search unit for automatic search meth-
ods [
62
,
55
,
5
]. For instance, MobileNet [
21
,
44
,
20
] utilized
the depthwise and pointwise convolutions to construct a
unit for approximating the original convolutional layer with
larger filters and achieved comparable performance. Shuf-
fleNet [
61
,
40
] further explored a channel shuffle operation
1
arXiv:1911.11907v2 [cs.CV] 13 Mar 2020
下载后可阅读完整内容,剩余9页未读,立即下载

佑林杉
- 粉丝: 10
- 资源: 28
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


