"基于RRT的复杂环境下机器人路径规划研究"
需积分: 0 103 浏览量
更新于2024-01-16
收藏 1.39MB PDF 举报
机器人学是一门涵盖理论、设计、制造和应用的综合学科,随着科技的不断进步,机器人的应用逐渐广泛。在移动机器人中,路径规划技术是至关重要的。本研究旨在基于RRT(Rapid-exploring Random Trees)算法,在复杂环境下进行机器人路径规划。本文以基于RRT的复杂环境下机器人路径规划为主题,研究了RRT算法在复杂环境下的路径规划能力。首先对RRT算法进行了深入的研究和分析,包括算法原理、关键技术和优缺点。然后针对复杂环境下的路径规划问题,提出了一种改进的RRT算法,并对算法进行了详细的描述和分析。接着通过仿真实验和实际测试,验证了改进的RRT算法在复杂环境下的有效性和可行性。最后对实验结果进行了分析和总结。通过本研究,可以为移动机器人在复杂环境下的路径规划提供一种有效的解决方案。
本研究主要涉及到了机器人路径规划领域的一些关键技术和方法,对RRT算法在复杂环境下的应用进行了深入的探索和研究。首先介绍了机器人学的发展背景和研究意义,以及RRT算法在路径规划中的作用和意义。然后详细阐述了RRT算法的原理和基本思想,包括树的生长策略、节点的扩展方式和路径的搜索方法。接着针对RRT算法在复杂环境下的局限性,提出了改进的RRT算法,主要包括引入启发式函数、优化树的生长方向和节点的扩展策略。随后通过仿真实验和实际测试,对改进的RRT算法进行了验证和分析,结果表明改进的RRT算法在复杂环境下具有较好的路径规划性能和鲁棒性。最后对研究的成果进行了总结和展望,指出了未来研究的方向和重点。
通过本研究,充分展示了RRT算法在复杂环境下的机器人路径规划中的优势和特点,为移动机器人在复杂环境下的智能路径规划提供了一种有效的解决方案,并具有一定的工程应用价值。同时也为机器人路径规划领域的研究提供了一些新的思路和方法,对相关领域的学术研究具有一定的参考和借鉴意义。希望本研究能够对机器人路径规划领域的学术研究和工程应用产生一定的推动作用,为移动机器人在复杂环境下的智能化应用提供技术支持和理论指导。
4
要原因。局部路径规划能够很好的朝目标前进,但不能保证一定能够到达目标点。换句
话说:局部路径规划不能全局收敛。
全局路径规划法经常被称作“深思熟虑”的方法,而局部路径规划法则被称为“交
互法”或“发射法”。
全局路径规划法也可能找不到可行的路径,但是它们相比与局部路径规划法来说更
容易找到可行路径。
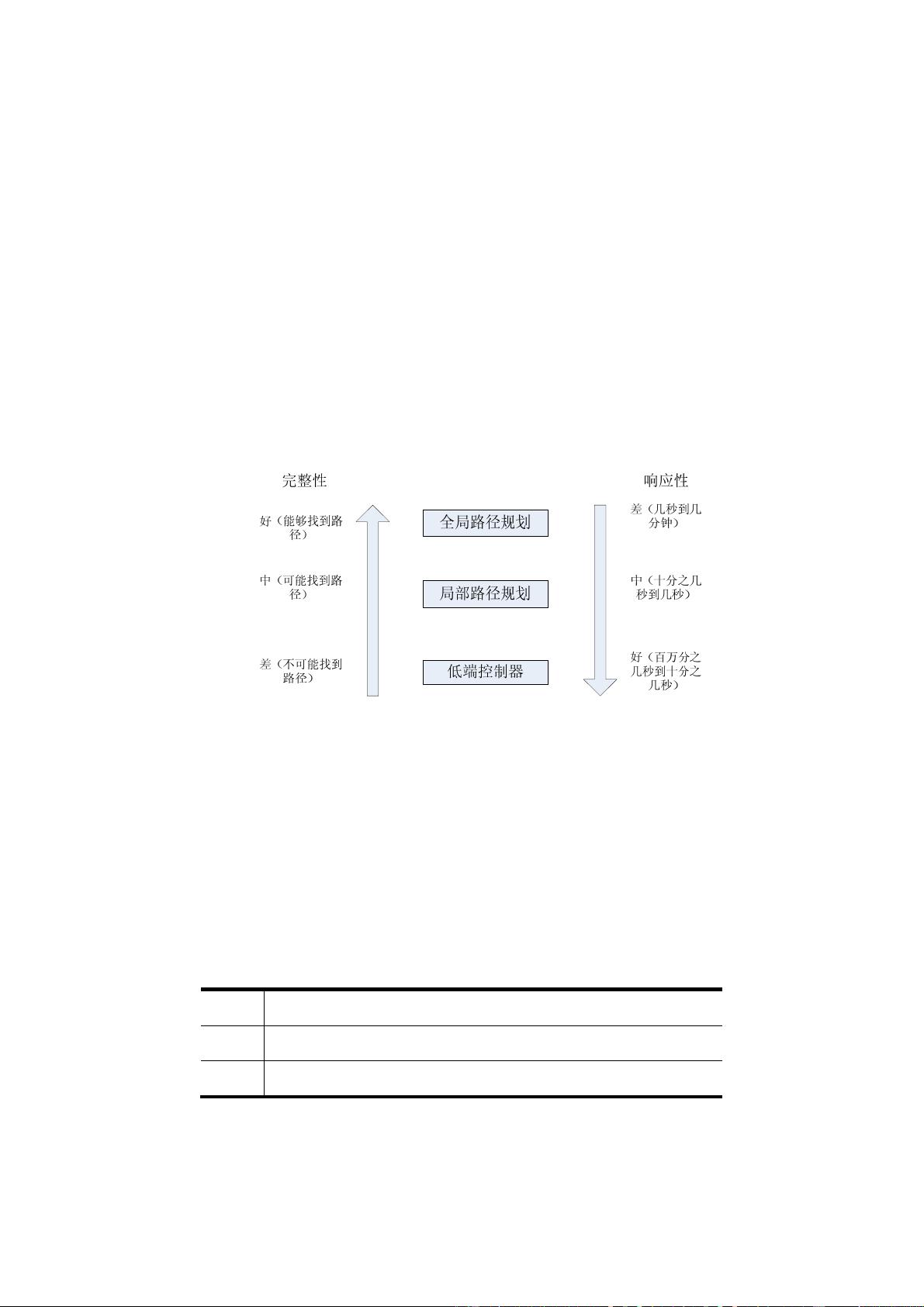
全局和局部路径规划法两者都有他们的局限性。混合方法试着结合全局路径规划法
和局部路径规划法来解决这些问题。如图 2.1 所示的“双层系统”:全局规划法规划出一
条路径然后局部路径规划法尝试着跟踪这条路径
[10]
。
图 1.1 全局法与局部法的关系
局部法比全局法有更快快的运行速度,它能够发现并且回应全局路径规划法不能预
见的事件。这使得混合方法比单一的全局方法具有更强的鲁棒性,然而它保持着全局路
径规划法很多温和的属性。混合方法的示例见
[11,12,30]
。
1.3.2 移动机器人的全局路径规划法
这种路径规划方法的过程可以分为三个步骤,这三个步骤构成了所有全局路径规划
法有效运行的基础。具体过程见表 1.1。
表 1.1 全局路径规划法的步骤
(1) 利用相关环境建模技术划分环境空间
(2) 形成包含环境空间信息的搜索空间
(3) 在搜索空间上应用各种搜索策略进行搜索
常见的搜索算法有:A*算法
[13]
、D*算法
[14]
、遗传算法
[15,16]
等。
全局路径规划法主要包括:栅格法、可视图法、拓扑法与自由空间法等。

剩余69页未读,继续阅读
2021-03-16 上传
2024-01-02 上传
2023-07-23 上传
2023-07-23 上传
2024-08-17 上传
2023-10-13 上传
2023-06-06 上传

图像车间
- 粉丝: 35
- 资源: 297
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建Cadence PSpice仿真模型库教程
- VMware 10.0安装指南:步骤详解与网络、文件共享解决方案
- 中国互联网20周年必读:影响行业的100本经典书籍
- SQL Server 2000 Analysis Services的经典MDX查询示例
- VC6.0 MFC操作Excel教程:亲测Win7下的应用与保存技巧
- 使用Python NetworkX处理网络图
- 科技驱动:计算机控制技术的革新与应用
- MF-1型机器人硬件与robobasic编程详解
- ADC性能指标解析:超越位数、SNR和谐波
- 通用示波器改造为逻辑分析仪:0-1字符显示与电路设计
- C++实现TCP控制台客户端
- SOA架构下ESB在卷烟厂的信息整合与决策支持
- 三维人脸识别:技术进展与应用解析
- 单张人脸图像的眼镜边框自动去除方法
- C语言绘制图形:余弦曲线与正弦函数示例
- Matlab 文件操作入门:fopen、fclose、fprintf、fscanf 等函数使用详解
