OpenCV实践:张正友标定法详解与相机畸变矫正
需积分: 0 105 浏览量
更新于2024-08-05
收藏 984KB PDF 举报
"该资源主要介绍了如何使用OpenCV实现张正友相机标定法,包括标定图片的准备、角点检测与优化、标定方法的调用以及图像矫正的步骤。"
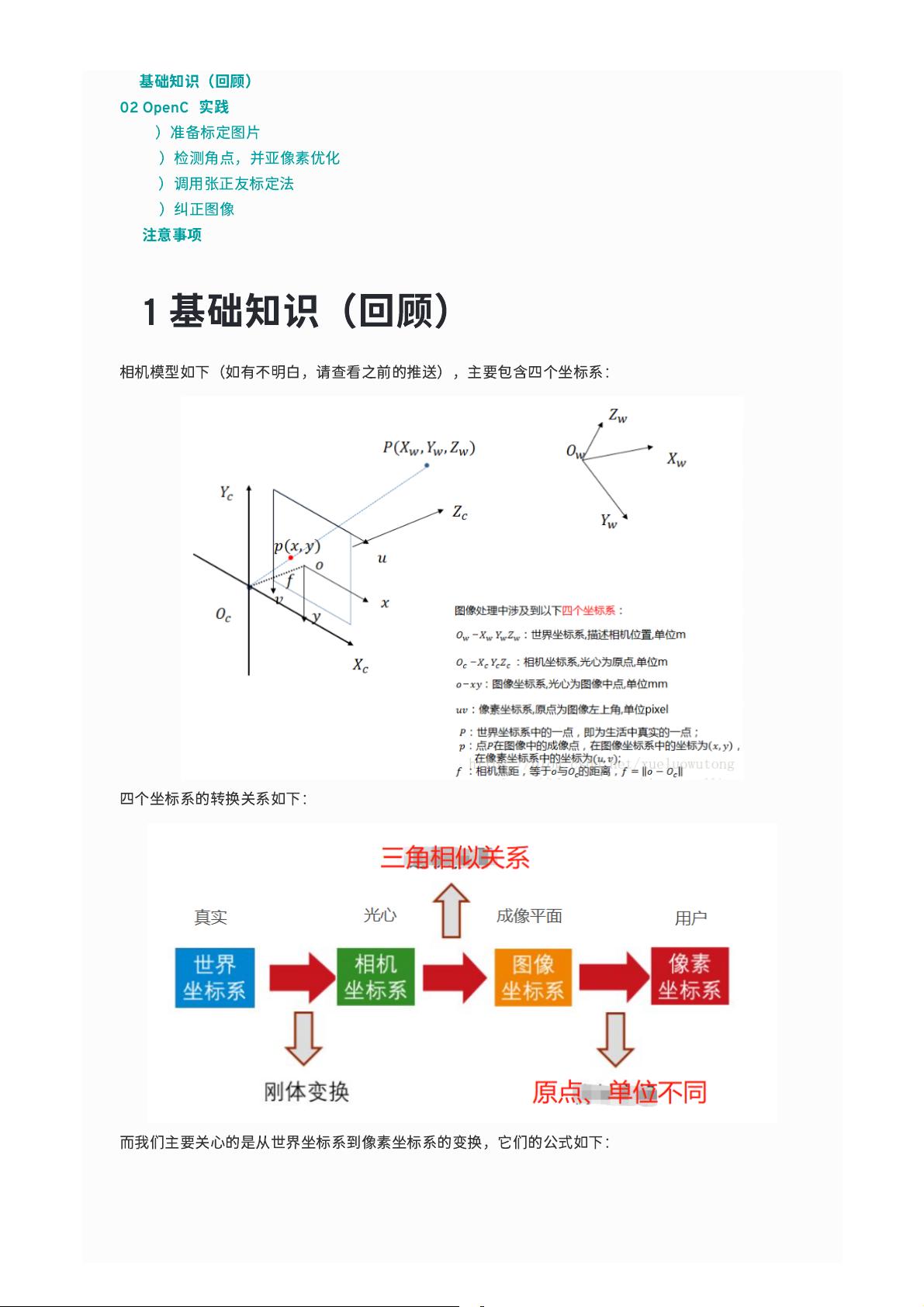
在计算机视觉领域,相机标定是一项基础且重要的任务,它旨在获取相机的内在和外在参数,以便校正图像畸变并准确地进行三维重建。张正友标定法是一种广泛应用的相机标定技术,通过该方法可以计算出相机的内参矩阵和畸变系数。
1. **标定图片的准备**:
标定过程需要一组在不同位置、角度和姿态下拍摄的标定图片,通常建议至少3张,但为了提高精度,10至20张更为理想。标定图片通常使用棋盘格图案,因为其特征明显且均匀分布,方便角点检测。图片中的棋盘格大小和角点数量需要记录,以便后续处理。
2. **角点检测与亚像素优化**:
使用OpenCV中的`findChessboardCorners`函数可以检测到棋盘格的角点。为了提高定位精度,通常会进行亚像素级优化,这可以通过`cornerSubPix`函数实现,它能进一步细化角点的位置。
3. **调用张正友标定法**:
标定过程中,OpenCV提供了`calibrateCamera`函数,输入包括角点的像素坐标和物理坐标,它会返回相机的内参矩阵`cameraMatrix`、畸变系数`distCoeffs`以及外参`rvecs`和`tvecs`。内参矩阵描述了相机的光学属性,畸变系数用于描述相机的径向和切向畸变。
4. **评价标定结果**:
通过重投影误差来评估标定质量,这是将已知三维点投影到校正后的图像和平原上的误差。
5. **图像矫正**:
有了内参和畸变系数,就可以使用`undistort`函数对任意输入图像进行畸变矫正,从而得到无畸变的图像,这对于后续的图像处理和计算机视觉任务至关重要。
在OpenCV实践中,代码通常包括以下几个关键部分:
- 图片列表的加载
- 棋盘格角点的检测和优化
- `calibrateCamera`的调用
- 重投影误差的计算
- 使用`undistort`进行图像矫正
通过理解这些步骤,开发者可以有效地实现相机标定,并利用OpenCV提供的工具进行图像矫正,提升计算机视觉应用的准确性。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-05-09 上传
点击了解资源详情
2024-10-30 上传
2022-09-19 上传
2023-05-31 上传
2023-09-27 上传









