发那科机器人PROFIBUS主设置详解:地址分配与参数配置
版权申诉
发那科机器人PROFIBUS做主设置是一项关键任务,用于实现机器人与工业现场设备之间的高效通信。PROFIBUS是一种广泛应用于自动化领域的工业通信协议,适用于分布式控制系统(DCS)和现场总线网络。在发那科机器人中,作为DP(DeviceNet)主站的设置尤为重要,因为这决定着机器人如何与DP从站进行数据交换。
首先,DP MASTER BOARD CONFIG部分,用户需要配置从模块地址,确保每个从站都有唯一的地址,且地址不会冲突。同时,要设定从模块的输入字节(IN-BYTE)和输出字节.OUT-BYTE),以及它们的偏移量(IN-OFS和OUT-OFS)。输入和输出字节偏移量的计算要考虑前一个使能模块占用的总字节数,避免地址重叠。例如,如果3号站已占用了3个输入字节和1个输出字节,那么4号站的输入和输出偏移量就需要相应增加。
DP MASTER SETUP界面用于调整主站的输入输出配置,包括总的数字量点数,这些通常无需改动,除非有特殊需求。该设置决定了主站可以处理的通信流量和数据容量。
DP MASTER BUS PARAMETER是关于主站总线参数的配置,用户可以选择合适的波特率(Baudrate),系统会自动配置其他必要的参数,如帧格式、校验方式等。正确的波特率设置对数据传输的稳定性和速度至关重要。
在整个过程中,理解PROFIBUS的数据帧结构、寻址方式和同步机制对于正确设置至关重要。主站的正确配置可以确保通信的可靠性和效率,提高整个生产过程的自动化水平。同时,定期检查和维护这些设置,确保其与实际应用环境相匹配,能够预防潜在的通信问题和设备故障。
发那科机器人通过PROFIBUS做主设置时,需要细致地规划地址分配、数据传输路径和通信参数,以实现与工业设备的无缝集成和高效操作。这不仅涉及基础的通信技术,还要求用户对机器人系统的内部架构有深入理解。
PROFIBUS-DPMASTERBOARDCONFIG
一、选项树形图
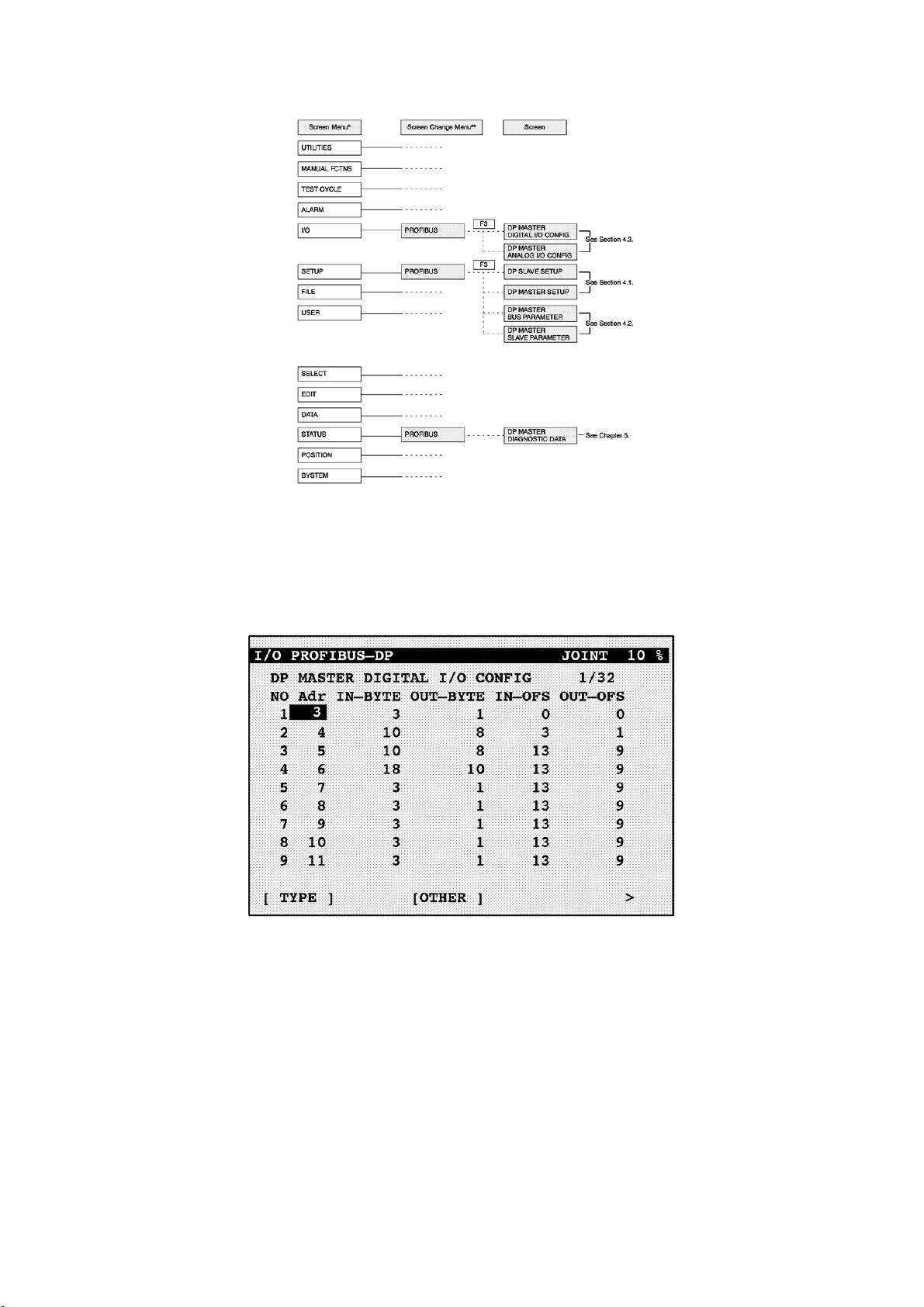
二、DPMASTERDIGITALI/OCONFIG
按“MENU”键选择“I/O”选择“PROFIBUS”按“F3”选择“DPMASTERDIGITALI/OCONFIG”出现下图
所示界面:
Adr:从模块地址、IN-BYTE:从模块输入字节、OUT-BYTE:从模块输出字节、IN-OFS:从模块输入字节偏移量、OUT-OFS:
从模块输出字节偏移量。
每个从模块分配一个地址,不能重复,Adr 的值也无需更改,默认即可。设定从模块的输入输出字节,设定从模块的输入
输出字节偏移量(即此模块之前的使能地址已占据的总字节数,不使能的地址不算入总字节数,使能的从模块所映射的字
节偏移量不能重复。模块使能将在之后的第五节中说明。)
如上图所示:由于 5 号站和号站的输入输出偏移量一致,所以 5 号站和 6 号站只可能一个处于使能状态,假设 5 号站不
使能。3 号站为 3 字节输入,1 字节输出。4 号站点为 10 字节输入,8 字节输出,由于前一个 3 号站点的输入已占据 3
个字节,输出已占据 1 个字节,所以 4 号站的输入偏移量为 3,输出偏移量为 1。6 号站为 18 字节输入,10 字节输出。
由于前两个站点 3 和 4 的总输入已占据 13 个字节,输出已占据 9 个自己,所以 6 号站的输入偏移量为 13,输出偏移量
为9。
假设 5 号站处于使能状态,则此时 6 号站的输入偏移量应为 23,输出偏移量应为 17。
下载后可阅读完整内容,剩余8页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-29 上传
2021-08-07 上传
2022-06-19 上传
2021-10-02 上传
2020-12-23 上传

jqrbcts
- 粉丝: 150
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- SD卡规格书(英文版)SD Memory Card Specifications
- C程序设计常见100道例题
- 一级倒立摆的模糊控制
- 基于模糊控制的智能车调速系统的设计.pdf
- CUDA编译器nvcc的说明
- 用8086汇编语言设计一存取款小软件系统
- 优秀毕业论文,师范专业,教育类
- 最完善的XML 架构讲解
- JTAG+ 调 试 原 理
- ModBus协议(中文pdf文件).pdf
- 局域网速查手册——完全精通局域网
- Advanced MFC Programming
- Software Architecture_Arch-YN-08
- opengl 编程指南(英文版)
- 戏说面向对象程序设计C#版.pdf
- 虚拟实验指导书(高校实验原理图)
