应对不确定性的智能体:人工智能与动态环境探索
需积分: 9 126 浏览量
更新于2024-07-31
收藏 571KB PPT 举报
"K-不确定性在人工智能中的应用和挑战"
人工智能(AI)是现代科技领域的一个重要分支,它致力于让机器模拟人类的智能行为。在实际应用中,AI系统经常面临各种不确定性,这些不确定性源于环境的复杂性、信息的不完全性和动态变化。"K-不确定性"是描述这种现象的一种理论框架,它强调了我们在处理信息时知识的局限性。在"K-不确定性--人工智能(AI).ppt"中,主要探讨了如何在面对不完美信息和动态环境时设计和优化智能体的行为。
首先,课程介绍了传统AI模型通常基于的理想化假设:世界的状态完全可观察,行动结果可预测。然而,现实世界往往并不遵循这些规则。例如,机器人可能需要在充满移动障碍物的环境中寻找目标位置,这涉及到一个动态的世界,其中障碍物的位置和运动状态不断变化,使得预测和规划变得复杂。
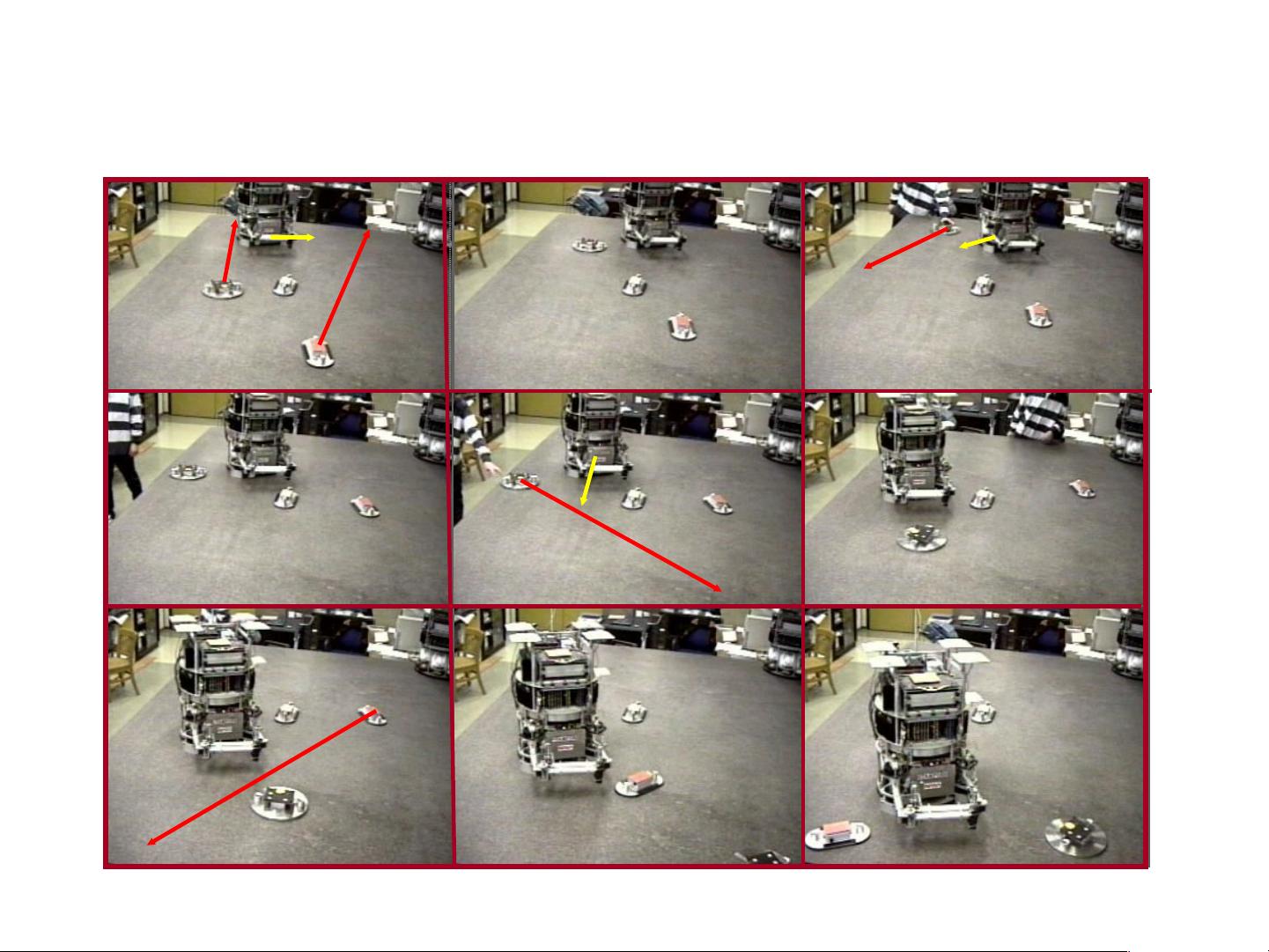
以广西大学计算机学院课程中的机器人实验为例,这个机器人装备有空气轴承、气体储罐和空气推进器,用于研究无重力空间环境下的控制和规划问题。机器人和障碍物被建模为平面上移动的圆盘,其位置和速度通过头顶摄像头每1/30秒进行一次测量。实验结果显示,尽管可以获取部分信息,但仍然存在诸多不确定性,如传感器的不精确、推进器可能的故障、机器人的能源问题,甚至实验环境本身的意外变化。
在这种情况下,K-不确定性理论就显得尤为重要。它鼓励智能系统设计者考虑到这些不确定性,并开发出能够适应不确定环境的算法和策略。这可能涉及到概率推理、模糊逻辑、贝叶斯网络等技术,以处理部分观测、不精确信息和未知事件。例如,机器人可能需要使用概率模型来预测未来状态,并通过实时更新其信念状态来应对不可预知的情况。
此外,处理K-不确定性可能需要建立更复杂的模型,如马尔科夫决策过程(MDP)或 partially observable Markov decision processes (POMDP),这些模型允许智能体在不完全信息下做出最佳决策。同时,强化学习也可以帮助智能体通过与环境的交互,逐步学习并优化策略。
K-不确定性是AI研究的关键议题,因为它反映了真实世界中智能系统必须应对的复杂性和不可预测性。理解并解决这些不确定性,对于推动AI技术在实际应用中的进步至关重要,包括在自动驾驶、无人机导航、医疗诊断等多个领域。
人工智能原理 2008 年春季 广西大学 计算机学院
Dr.Ou
Experimental Run
Total duration : 40 sec
X
剩余29页未读,继续阅读
153 浏览量
109 浏览量
2024-05-07 上传
2022-12-02 上传
2024-05-07 上传
147 浏览量
2024-05-07 上传

xlblank
- 粉丝: 8
- 资源: 129
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实战Visual C#数据库编程
- windows xp 故障恢复台
- OpenGL.Extensions.-.Nvidia
- ibatis 开发指南.pdf
- 悟透JavaScript
- ASP.NET常用代码
- Struts in Action 中文版.pdf
- 注册电气工程师2009年考试大纲
- 网络银行的现状及发展策略
- WCDMA系统网络规化技术
- EJB3.0(PDF)电子书
- Ajax3D-SIGGRAPH2006幻灯片Ajax3D The Open Platform for Rich 3D Web Applications.pdf
- C# C# C#
- TD-SCDMA通信系统呼叫处理详细过程
- oracle 与db2比较
- 线形代数同济第四版答案
