自适应神经滑模控制:应对输入饱和度不确定非线性系统
46 浏览量
更新于2024-08-26
收藏 1.35MB PDF 举报
"输入饱和度未知的不确定非线性系统的自适应神经动态表面滑模控制"
在自适应控制领域,输入饱和度未知的不确定非线性系统是一个重要的研究课题。这篇研究论文提出了一种针对此类系统的自适应神经动态表面滑模控制策略。滑模控制是一种在面对不确定性时仍能保持系统稳定的有效方法,而神经网络则被用来处理非线性和未知输入饱和度的问题。
论文首先介绍了如何处理非光滑的输入饱和度非线性问题。通过将其近似为一个平滑的非仿射函数,并利用微分中的中值定理,可以将这个非线性转化为仿射形式,从而简化了控制设计的复杂性。接下来,论文引入了一个简单的sigmoid神经网络来逼近系统中的不确定非线性,包括输入饱和度。通过适应性学习规则,神经网络能够在线估计并补偿这种不确定性。
关键创新点在于设计虚拟控制器,它结合了动态表面控制和积分滑模技术。这样不仅避免了传统后向递推设计中可能出现的复杂性爆炸问题,而且在不需要预先知道输入饱和度界限的情况下也能实现良好的控制性能。这大大提高了控制策略的实用性。
论文通过比较仿真结果展示了所提出的控制方案的有效性和优越性。这些仿真可能涉及到不同的不确定性和输入饱和度情况,以证明控制器在各种工况下的鲁棒性。
这篇研究论文为不确定非线性系统提供了一种新的自适应控制策略,该策略具有较强的鲁棒性,能应对输入饱和度的未知性和非线性系统的不确定性。通过神经网络的适应性和滑模控制的稳定性,这一方法有望在实际工程应用中找到广泛的应用,特别是在那些难以精确建模或存在动态变化的系统中。
which are unknown nonlinear functions. From equations
(4) and (5), equation (1) can be re-expressed as
_
x
i
¼ f
i
ð
x
i
; 0Þþg
i
ð
x
i
; x
a
i
iþ1
Þx
iþ1
; 1 i n 1
_
x
n
¼ f
n
ð
x
n
; 0Þþg
n
ð
x
n
; v
a
i
Þv
y ¼ x
1
8
>
>
<
>
>
:
(6)
System coordinate transformation
In the following, it will be shown that the original system
(1) can be transformed into the canonical form with respect
to the newly defined state variables.
16
Let
z
1
¼ y ¼ x
1
z
2
¼ _z
1
¼ f
1
ðx
1
Þþg
1
ðx
1
; x
a
1
2
Þx
2
(7)
The time derivative of z
2
is derived as
_z
2
¼
@f
1
ðx
1
Þ
@x
1
_
x
1
þ
@g
1
ðx
1
; x
a
1
2
Þ
@x
1
_
x
1
þ
@g
1
ðx
1
; x
a
1
2
Þ
@x
2
_
x
2
0
@
1
A
x
2
þ g
1
ðx
1
; x
a
1
2
Þ
_
x
2
¼
@f
1
@x
1
þ
@g
1
@x
1
x
2
0
@
1
A
ðf
1
þ g
1
x
2
Þþ
@g
1
@x
2
x
2
þ g
1
0
@
1
A
ðf
2
þ g
2
x
3
Þ
¼
D
a
2
ð
x
2
Þþb
2
ð
x
2
; x
a
2
3
Þx
3
(8)
where a
2
ð
x
2
Þ¼
@f
1
@x
1
þ
@g
1
@x
1
x
2
ðf
1
þ g
1
x
2
Þþ
@g
1
@x
2
x
2
þ g
1
f
2
and b
2
ð
x
2
; x
a
2
3
Þ¼
@g
1
@x
2
x
2
þ g
1
g
2
.Again,letz
3
¼ a
2
þ
b
2
x
3
, and its time derivative is
_z
3
¼
X
2
j¼1
@a
2
@x
j
_
x
j
þ
X
3
j¼1
@b
2
@x
j
_
x
j
x
3
þ b
2
_
x
3
¼
X
2
j¼1
@a
2
@x
j
þ
@b
2
@x
j
0
@
1
A
ðf
j
þ g
j
x
jþ1
Þ
þ
@b
2
@x
3
x
3
þb
2
0
@
1
A
ðf
3
þ g
3
x
4
Þ
¼
D
a
3
ð
x
3
Þþb
3
ð
x
3
; x
a
3
4
Þx
4
(9)
where a
3
ð
x
3
Þ¼
P
2
j¼1
@a
2
@x
j
þ
@b
2
@x
j
ðf
j
þ g
j
x
jþ1
Þþ
@b
2
@x
3
x
3
þb
2
f
3
and b
3
ð
x
3
; x
a
3
4
Þ¼
@b
2
@x
3
x
3
þb
2
g
3
. When defining a
i1
and
b
i1
, i ¼ 2; ... ; n, we can obtain
z
i
¼
D
a
i1
ð
x
i1
Þþb
i1
ð
x
i1
; x
a
i1
i
Þx
i
_z
i
¼ a
i
ð
x
i
Þþb
i
ð
x
i
Þx
iþ1
(10)
where
a
i
ð
x
i
Þ¼
D
X
i1
j¼1
@a
i1
@x
j
þ
@b
i1
@x
j
x
i
0
@
1
A
ðf
j
þ g
j
x
jþ1
Þ
þ
@b
i1
@x
i
x
i
þb
i1
0
@
1
A
f
i
b
i
ð
x
i
; x
a
i
iþ1
Þ¼
D
@b
i1
@x
i
x
i
þb
i1
0
@
1
A
g
i
(11)
Thus, the pure feedback system (6) can be rewritten in
the canonical form with respect to the newly defined state
variables as
_z
i
¼ z
iþ1
; i ¼ 1; ... ; n 1
_z
n
¼ a
n
ð
x
n
Þþb
n
ð
x
n
; v
a
n
Þ v
y ¼ z
1
8
>
<
>
:
(12)
To proceed the design procedure, the control function
b
n
ð
x
n
; v
a
n
Þ in equation (12) is assumed to be positive and
bounded s atisfying 0 < b
1
< b
n
ð
x
n
; v
a
n
Þ < b
2
,whereb
1
and b
2
are positive constants. It is pointed out that this
condition has been widely used in the literature
17–20
as a
necessary condition for the controllability of equation (1).
The control objective of this article is to design a dynamic
surface sliding-mode controller vðtÞ for the system (12), such
that the system output y can track the desired reference signal
y
d
and all signals in the closed-loop system are bounded.
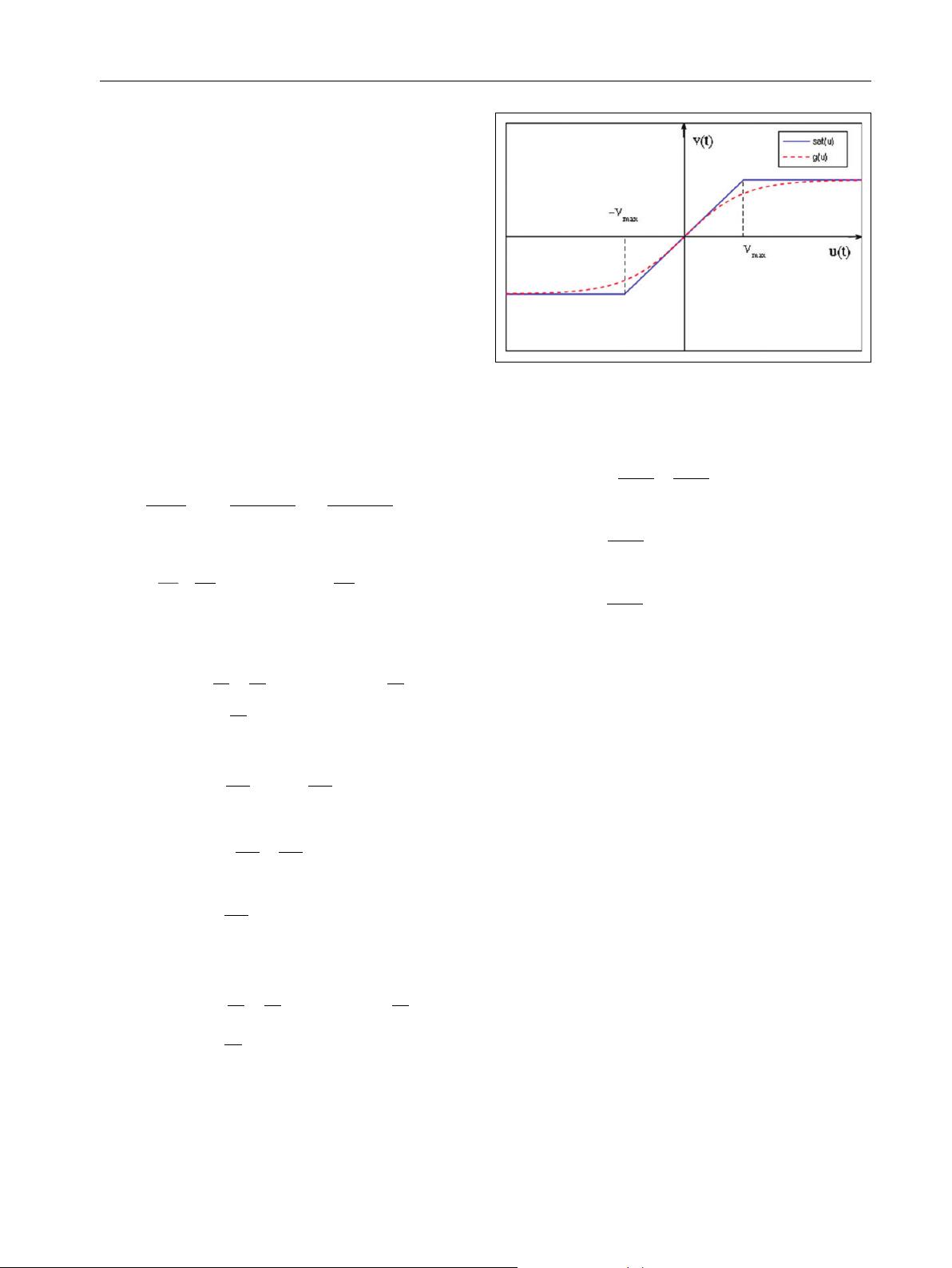
Nonlinear saturation model
As sh own in Figure 1, the co ntrol input vðtÞ2R is the
output of the following nonlinear input saturation and
uðtÞ2R is the input of the saturation (practical control
signal). The saturation is approximated by a smooth non-
affine function defined as
Figure 1. Saturation satðuÞ (solid line) and smooth function gðuÞ
(dot line).
Chen et al. 3
剩余13页未读,继续阅读
2021-09-25 上传
2021-05-29 上传
120 浏览量
258 浏览量
263 浏览量
178 浏览量
253 浏览量
2025-02-19 上传
126 浏览量

weixin_38663029
- 粉丝: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
