无人机SLAM实验:PCL库点云聚类与环境分割
 已收录资源合集
已收录资源合集
需积分: 0 132 浏览量
更新于2024-08-05
收藏 590KB PDF 举报
"实验7-实验指导书1"
在本次实验中,主要涉及了无人机SLAM(Simultaneous Localization and Mapping,即时定位与地图构建)的基础知识,特别是点云信息的提取与环境分割。实验目的是让学生掌握C++编程以及基于PCL(Point Cloud Library)的点云处理和分析技术。实验内容包括利用PCL库创建视窗显示点云信息,以及在C++工程中编写KMeans聚类算法。
点云信息是通过激光雷达传感器获取的,这种传感器广泛应用于无人机的测绘任务中,因为它能够提供目标的三维散射点信息。实验的一个关键部分是聚类分析,这在点云处理中是一个重要的无监督学习方法。聚类是指在没有预先知道类别的情况下,将数据集分成不同的簇,使得同一簇内的数据相似度高,而不同簇之间的差异度大。K-Means算法是常见的聚类方法,它通过迭代找到数据点的最佳分配,使簇内的数据点到簇中心的平方和最小。
1.2.1 聚类与环境分割:
聚类是无监督学习的一种,它依据数据自身的特性来划分数据组。在点云处理中,聚类可以用于环境分割,将点云数据分为不同的区域,比如地面、建筑物、树木等。这样的分割有助于理解无人机周围的环境,并为后续的SLAM算法提供基础。
1.2.2 算法指标分析与评价方法:
评估聚类效果通常需要无监督学习的指标,例如误差平方和准则(Jaccard系数)和纯度(Purity)。误差平方和准则衡量的是每个簇中所有样本到簇中心的平均距离,而纯度则是在已知类别标签的情况下,评估聚类结果的指标,计算一个簇中最大类别所占的比例。
纯度公式如下:
\[ P_c = \frac{\max_j |W_k \cap C_j|}{|W_k|} \]
其中,\(\{W_1, W_2, ..., W_K\}\) 是聚类簇,\(\{C_1, C_2, ..., J\}\) 是真实类别,\(W_k \cap C_j\) 表示簇\(W_k\)与类别\(C_j\)的交集,而\(|.|\)表示集合的大小。
实验旨在让参与者了解如何在C++环境中使用PCL库进行点云处理,通过实现KMeans算法进行聚类,并通过可视化工具分析结果。此外,实验还强调了对不同聚类算法的比较和选择,以及遵循良好的编程规范。这不仅提升了学生的技术能力,也培养了他们在实际问题中选择合适算法的决策能力。
1
实验七 无人机 SLAM 基础 – 点云信息提取与环境分割
1.1 实验目的
在无人机的各种应用中,测绘作为一种重要功能,已经在近年来得到广大研
究者关注。激光雷达作为获取目标散射点三维信息的工具,是无人机在测绘领域
应用的重要传感器。
本次实验的目的是在 PCL 库的基础上掌握 C++的基本编程,以及基本点云
分析、地图构建方法的实现。在前序 PCL 库配置实验的基础上,充分利用 PCL
库以及 Visual Studio 强大的功能对点云进行聚类分析。掌握 K-Means 等方法在
点云聚类上的应用,通过点云可视化工具对聚类结果进行分析。在此基础上,掌
握算法比较的基本方法。并形成根据实际场景,对算法的优缺点进行辩证分析后
选择合适算法的意识。同时,掌握利用 C++进行项目开发时必要的编程规范。
1.2 实验原理
1.2.1 聚类与环境分割
在机器学习算法中,分类和聚类作为有监督和无监督学习的方法,是区分样
本的重要手段。聚类是指样本类别信息未知,即不了解一批样本中类别的前提下,
对样本进行标记区分的操作。聚类分析方法则是按照某个特定标准,把一个数据
集分割成不同的类或簇,使得同一个簇内的数据对象的相似性尽可能大,同时,
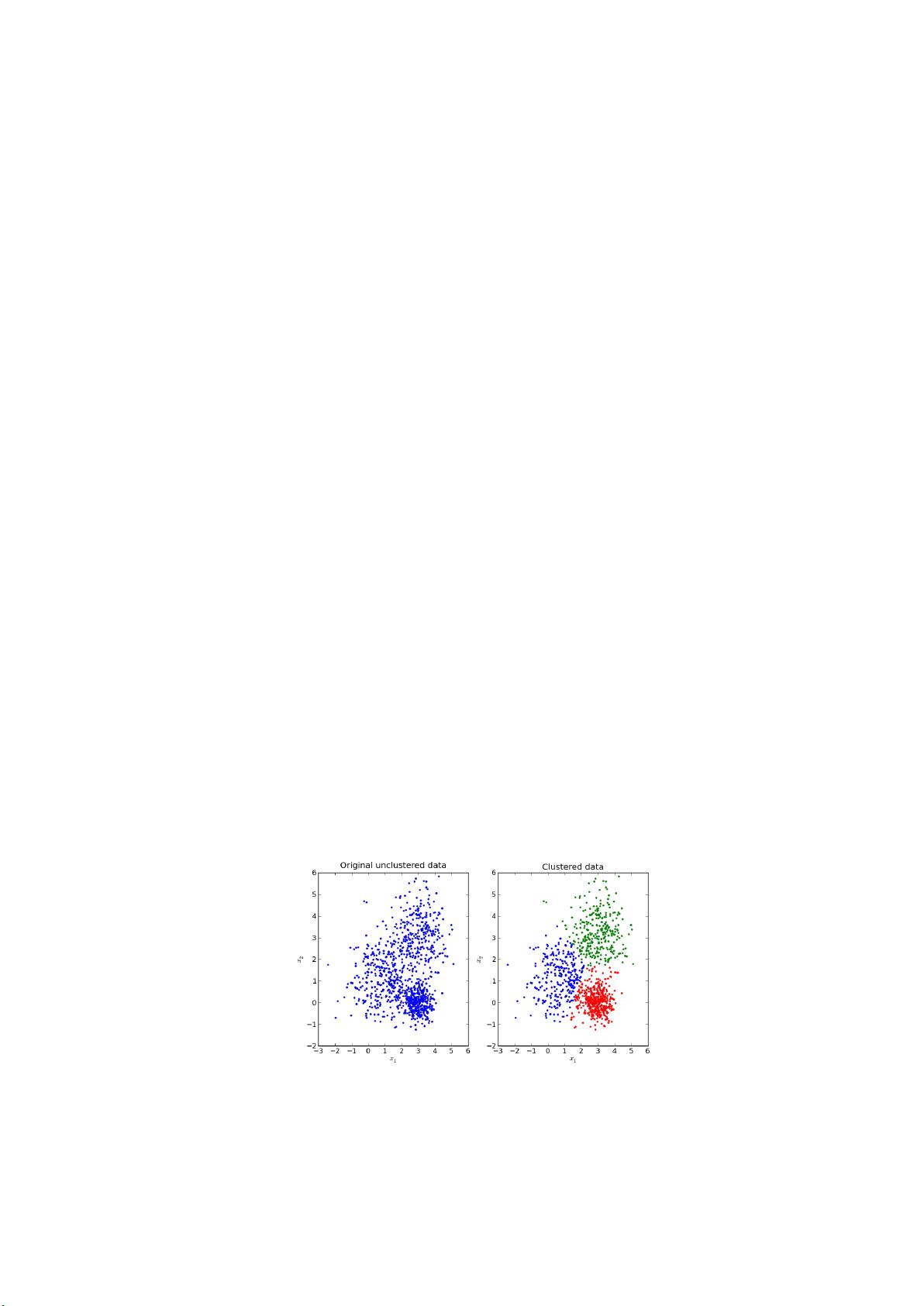
不在同一个簇内中的数据对象的差异性也尽可能大。从而实现“物以类聚”的效
果。如下图所示为聚类的实现效果图。
1.2.2 算法指标分析与评价方法 – 纯度与混淆矩阵
在聚类算法中,由于样本的标签信息先验未知,完全通过人为计算得出,故
衡量指标可以使用误差平方和准则
下载后可阅读完整内容,剩余6页未读,立即下载
2012-09-11 上传
2013-09-05 上传
2012-12-05 上传
2011-06-15 上传
2013-03-16 上传
2022-08-08 上传
2018-12-19 上传
2019-12-24 上传
2011-12-27 上传

Unique先森
- 粉丝: 32
- 资源: 327
 我的内容管理
展开
我的内容管理
展开







最新资源
- Struts2+pring+Hibernate+ExtJS开发实例(PDF)
- C++ standard
- 系统\Windows XP系统自带工具应用详解
- TOAD快速入门.pdf
- 电子技术基础 基础电路
- CAN控制器SJA1000的控制模块BCAN
- SJA1000应用指南
- 本科毕业论文-学生宿舍管理设计与实现
- Apress.Foundations.of.WF.An.Introduction.to.Windows.Workflow.Foundation.Oct.2006
- 搭建Eclipse+Myeclipse开发环境
- Microsoft.Press.Windows.Workflow.Foundation.Step.By.Step.Mar.2007.ebook-LiB
- .net 环境下ocx控件制作演示
- 网页超长文章自动分页
- Workflow Modeling—Tools for Process Improvement and Application Development
- 高质量C++编程指南
- Java毕业设计文献翻译
