超声波防撞系统设计:双接收头与单片机控制
98 浏览量
更新于2024-08-31
收藏 429KB PDF 举报
该文介绍了一种基于单片机控制的防撞小车系统,利用双超声波接收头进行前方物体的定位和距离测量。系统通过超声波发射和接收信号,经由单片机处理,计算出与障碍物的距离,并判断其是否位于小车行驶路径上。
在系统设计中,主要包含以下几个关键知识点:
1. **超声波传感技术**:超声波传感器用于发射和接收超声波,通过测量超声波从发射到接收的时间,可以计算出与障碍物的距离。超声波在空气中的传播速度会受温度影响,因此系统还集成了18B20测温模块,以修正超声波速度,提高测距精度。
2. **单片机控制**:文中采用AT89S52单片机作为核心控制器,负责产生40KHz的方波信号驱动超声波传感器,并通过外中断0口检测返回信号。此外,单片机还处理数据计算,包括距离计算和方位判断。
3. **硬件组成**:系统硬件包括超声波传感器、反相器7404、红外检测集成芯片CX20106、4位LED数码管显示电路(采用74LS244和8550驱动)、以及18B20温度传感器。
4. **距离计算与方位判断**:通过两个超声波接收头的数据,单片机计算出物体到每个接收端的距离(z1、z2),然后通过计算两个距离的差值(z2-z1),结合预设的参数d(两接收头之间的距离)和h(障碍物与小车的垂直距离),来判断物体是否位于小车行径的路线上。通过设定阈值(如4cm),当z2-z1的差值超过阈值时,表明障碍物可能偏离小车中心,从而实现防撞功能。
5. **算法控制**:算法的关键在于优化计算过程,避免复杂的数学推导,通过距离差的增函数特性,快速判断物体位置,节省单片机的处理时间。
6. **几何关系分析**:通过图形分析(图3和图4),作者展示了z2-z1与l(前方障碍物与小车的水平距离)之间的关系,以及各物理量之间的几何联系,这有助于理解算法的逻辑和防撞判断的依据。
这个基于双超声波接收头的防撞小车系统设计巧妙地结合了超声波传感、单片机控制和简单的几何分析,实现了高效且准确的前方障碍物检测和防撞功能。
基于双超声波接收头的防撞小车系统设计基于双超声波接收头的防撞小车系统设计
本文提出了一种基于单片机控制的超声波定位前方物体的监测控制系统。通过一左一右的双超声波接收头检测
信号,送单片机进行数据计算处理,能够精确计算与障碍物的距离,同时判断该障碍物是否位于车辆行径的路
线上。
1 引言引言
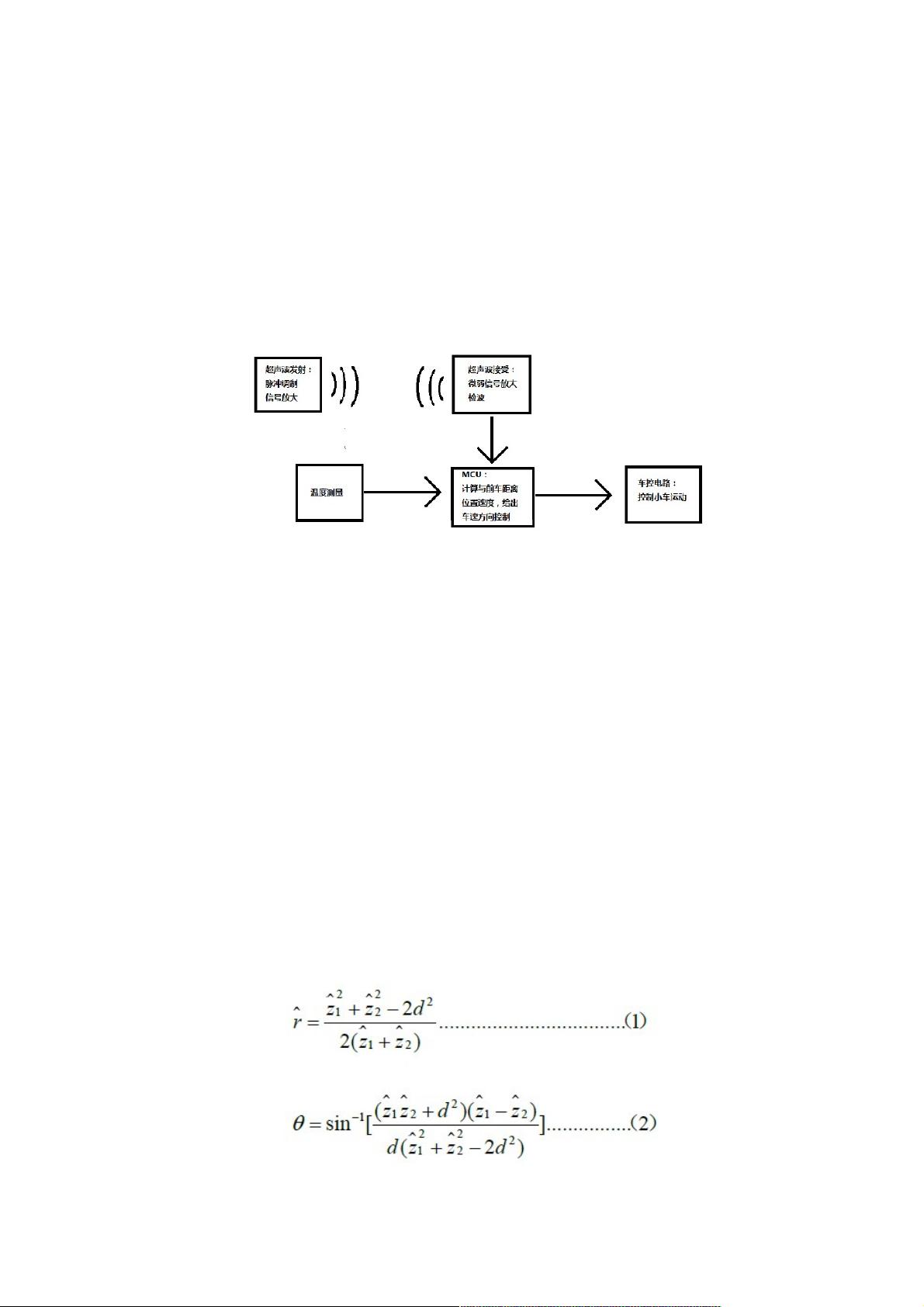
2系统的结构流程设计系统的结构流程设计
我们的整个系统需要完成测距,
图1:系统结构框图
通过
具体的硬件组成为:MCU 采用AT89S52 单片机,P1.0 口输出超声波换能器所需的40K 方波信号,经过反相器7404 后驱
动传感器,为了能使超声波发射得更远,我们并接了三个发射头,利用外中断0 口监测超声波接收电路输出的返回信号,回波
检测采用红外检测集成芯片CX20106,显示电路采用简单的4 位共阳LED 数码管,断码用74LS244,位码用8550 驱动。测温
部分使用18B20 测出当前的环境温度用以判断出超声波传播的速度。
3 MCU 算法控制算法控制
3.1 距离计算与方位判断距离计算与方位判断
单片机可以计算出发射与接收到超声波之间的时间,根据测温系统的实际测温, 查找出在该对应温度下的声速,计算出
反射物距离两接收端的距离。 理论上由以上两个数据上就可以直接数学推导出该物体的空间位置(如图2 和公式一、二所
示)。
下载后可阅读完整内容,剩余3页未读,立即下载
2023-06-24 上传
1019 浏览量
292 浏览量
147 浏览量
263 浏览量
139 浏览量
374 浏览量
121 浏览量
132 浏览量

weixin_38547421
- 粉丝: 3
- 资源: 958
 我的内容管理
展开
我的内容管理
展开







最新资源
- STM32通过按键改变PWM占空比产生呼吸灯效果
- react-django-docker
- A_Simple_Game_of_Fetch_Build:和狗一起玩取回游戏,并反思您作为老人的生活
- 九丁百度图片下载搜索工具 v1.0
- Catfish(鲶鱼) Blog v2.0.75
- AMwebsite:网站开发
- 静态网页 html/css 练习素材
- Hydra3D-开源
- ML_proj01
- 世界之窗浏览器(TheWorld) v3.6.1.0
- 无后顾之忧:React的状态管理库
- Library-Python-SQLAlchemy-Flask:使用python flask将库数据保存到sqlite.db
- 仿webqq的webos框架zos,基于hoorayos2.0移植的纯html+js版本,后端语言.net
- fw —工作区生产力的助推器-Rust开发
- my_xUltimate-d9pc-x86
- 行业文档-设计装置-除琐屑的建筑用钢筋切割装置.zip
