
Technical Foundation and Calibration Methods for Time-of-Flight Cameras 7
Beside integration time, that directly influences the signal-to-noise ratio (SNR)
of the measurement and consequently the variance of the measured distance, the
user can influenced the quality of the measurements made by setting the f
m
value
to fit the application. As stated by Lange [1], as f
m
increases the depth resolution
increases but the non ambiguity range decreases.
2.1 Systematic Distance Error
Systematic errors occur when the formulas used for the reconstruction do not
model all aspects of the actual physical imager. In CWIM cameras a prominent
such error is caused by differences between the actual modulation and correlation
functions and the idealized versions used for calculations. In case of a sinusodial
modulation Sec. 1.1 , higher order harmonics in the modulating light source
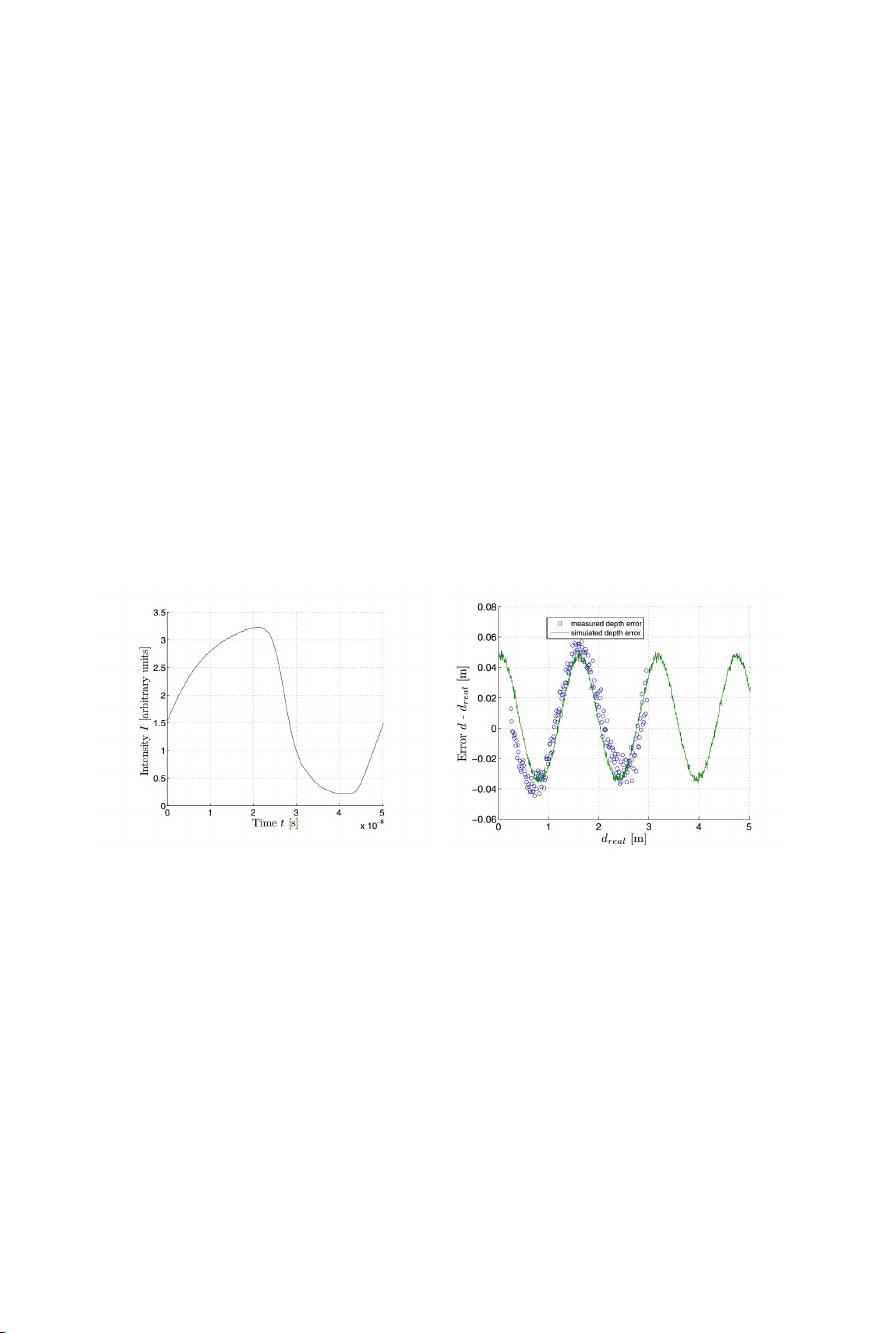
(Fig. 2.1) induce deviations from a perfect sine function.Use of the correlation
of the physical light source with the formulas 1.1 lead to a periodic ”wiggling”
error which causes the calculated depth to oscillate around the actual depth.
The actual form of this oscillation depends on the strength and frequencies of
the higher order harmonics. [1,3].
Fig. 2. Left:Measured modulation of the PMD light source: Right: Mean depth devia-
tion as a function of the real distance. Images from [4].
There are two approaches for solving this problem. The first approach is to
sample the correlation more phase shifts and extend the formulas to incorporate
higher order harmonics[5]. With current 2-tap sensor this approach induces more
errors when observing dynamic scenes. The second approach which we will fur-
ther discuss in 3.2 is to keep the formulas as they are and estimate the residual
error between true and calculated depth [6,7] . The residual can then be used
in a calibration step to eliminate the error. Finally, [8] employ a phase modu-
lation of the amplitude signal to attenuate the higher harmonics in the emitted
amplitude.

剩余323页未读,继续阅读

界明城
- 粉丝: 193
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


