改进YOLOv5算法:提升行人车辆小目标检测性能
版权申诉
"基于改进YOLOv5的行人车辆检测与识别算法研究"
本文主要探讨了如何通过改进YOLOv5算法来提高其在行人和车辆检测中的性能,特别是在处理小目标时的效果。YOLOv5,全称为You Only Look Once version 5,是一种高效的一阶段目标检测算法,它在通用目标检测任务中表现出色,但针对小目标(如远距离的行人和车辆)时,由于目标像素稀疏、相似度高等因素,其检测效果会有所下降。
为了改善这一状况,研究者采取了以下两个主要改进措施:
1. 数据增强策略:针对数据集中样本分布不均衡的问题,采用了Stitcher和尺度匹配等数据增强技术。Stitcher是一种合成图像的技术,可以将不同的图像片段拼接在一起,创造出更多具有复杂背景和不同目标尺寸的新样本,从而增加样本的多样性。尺度匹配则是调整输入图像的大小,确保不同大小的目标在训练过程中都能得到充分的覆盖,特别是增加了小目标的训练样本比例。
2. 网络结构优化:针对YOLOv5网络对小目标检测的不足,研究者添加了一个专门用于检测微小目标的检测头。这个额外的检测头设计是为了更专注于小目标的特征提取和定位。同时,他们还优化了损失函数,以确保小目标在整体预测中能够得到更大的权重,从而避免在检测过程中被忽视。
实验结果表明,经过改进的模型不仅保持了实时性,而且在小目标检测方面超越了原版YOLOv5,显著提升了对远距离车辆和行人检测的准确性和鲁棒性。这为实际应用中的行人和车辆检测,尤其是在安全监控、自动驾驶等领域,提供了更可靠的技术支持。
关键词涉及计算机视觉、YOLOv5、目标检测、车辆行人检测以及小目标检测,这些关键词反映了研究的核心内容和技术焦点。该研究的贡献在于提供了一种有效的方法,通过改进现有算法来应对实际场景中特定挑战,尤其是针对小目标的检测,这对于提升智能系统在复杂环境中的感知能力具有重要意义。
- 3 -
Fig. 1 YOLOv5 stucture diagram
上图为 YOLOv5 算法的框架图,将整个网络依据功能划分,可以分为四个部分:
1) 输入端:为图中左上角红绿蓝三色方块,主要负责输入图像的预处理,如将图像
的尺寸压缩为网络接受的输入尺寸,并进行归一化等,YOLOv5 在输入端采用了
Mosaic 数据增强、自适应锚框计算和自适应图片缩放;
2) Backbone:为图中左边第一列,主要负责图像的特征提取,指代已经在大型数据
集(如 ImageNet)上完成预训练,拥有预训练参数的卷积神经网络,YOLOv5 在
Backbone 采用了 Focus 结构和 CSP 结构,来减少反向梯度传播时的计算量,提高
学习能力;
3) Neck:为图中中间两列,主要负责图像的特征提取,指代已经在大型数据集(如
ImageNet)上完成预训练,拥有预训练参数的卷积神经网络,YOLOv5 在 Neck 采用
了 PAN 结构来融合不同的维度特征;
4) 预测段:为图中最后一列,主要负责预测目标的分类和位置,输出目标检测的结
果。
图中包含 Focus、CBL、C3、SPP 等基本模块,其作用如下所述:Focus 模块的作用是
对图片进行切片操作,将其切成四份后拼接,目的是为了获取完整的下采样信息;CBL 模
块包含卷积(Conv)、批归一化(BN)和 Leaky ReLU 激活函数,主要作用是完成对网络的下采
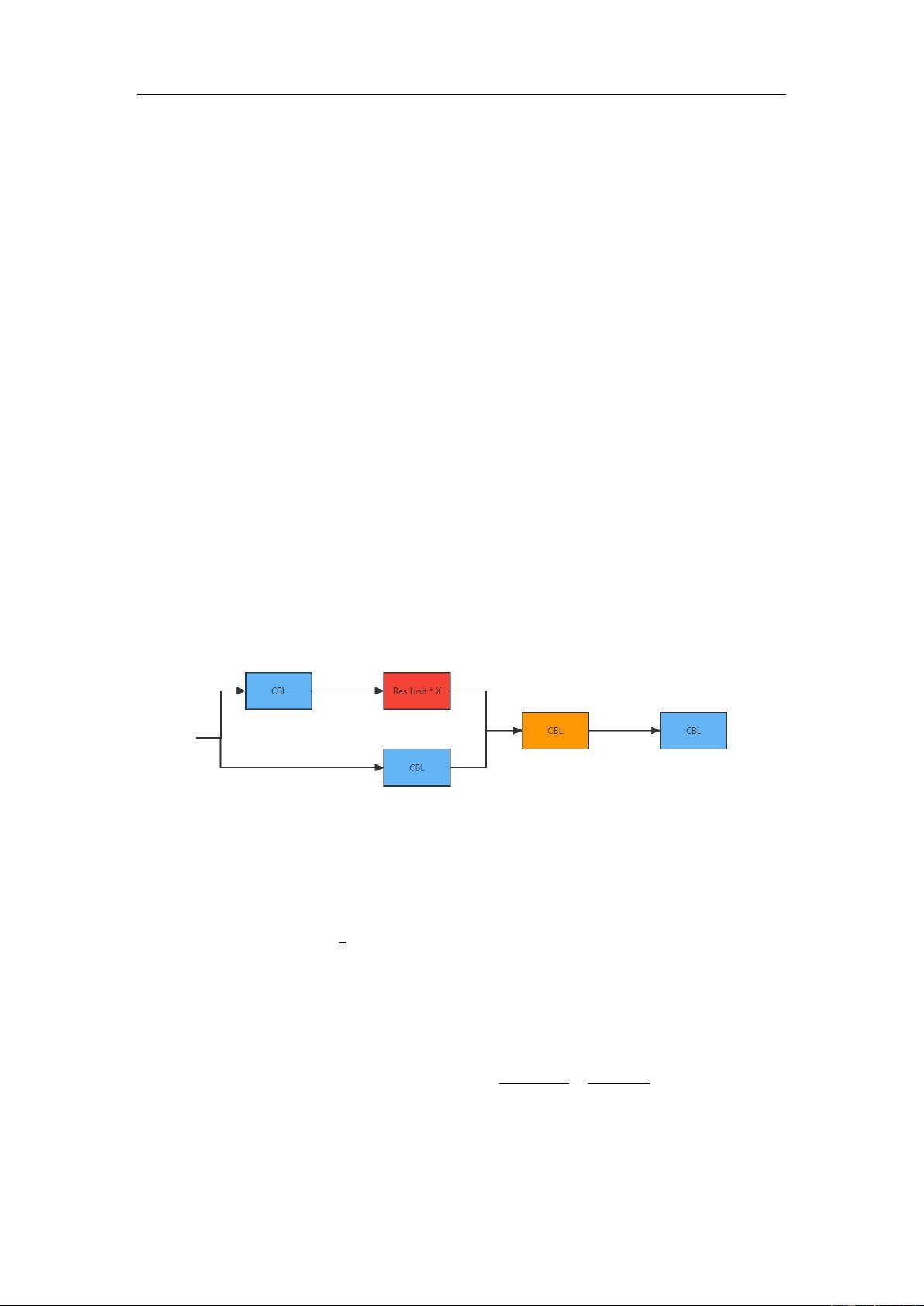
样;C3 模块的结构如下图,它借鉴了 CSPnet
[2]
的思想,将网络的输入分成两部分计算,目
的是增强网络的学习能力、降低计算量和内存成本;SPP 模块中采用 1×1、5×5、9×9 和
13×13 的最大池化,目的是进行多尺度融合,提高鲁棒性。
图 2 C3 模块结构图
Fig. 2 C3 module structure diagram
此外,对于预测端的损失函数,YOLOv5 采用二分类交叉熵损失函数(BCELoss)来
计算分类损失函数和置信度损失函数,采用 CIOU_Loss 来计算位置损失函数。BCELoss 的
计算公式为:
(1)
其中
是标签,取值为 0 或 1,
是网络预测分类
的概率。当
时,单项损失为
;当
时,单项损失为
。即当标签为 1 时,预测
的概率越大损失
越小;当标签为 0 时,预测
的概率越大损失越大。
CIOU_Loss 的计算公式为:
(2)
其中 Distance_O 为预测框与真实框中心点的距离,Distance_C 为预测框与真实框的最小外
接矩形的对角线距离,ϑ 为衡量预测框与真实框的长宽比一致的参数。同时,YOLOv5 还
采用 NMS 处理来筛选多余的预测框。
剩余12页未读,继续阅读
2023-05-24 上传
2021-08-18 上传
2024-03-25 上传
2023-02-16 上传
2023-11-05 上传
2023-09-19 上传
2023-05-01 上传
2023-05-17 上传
2023-09-17 上传

悠闲饭团
- 粉丝: 203
- 资源: 3416
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
