基于-piecewise 平滑图像模型的单幅图像自动噪声估计和去噪
需积分: 32 135 浏览量
更新于2024-07-21
收藏 5.3MB PDF 举报
"图像去噪算法和技术"
图像去噪是图像处理领域中的一项重要技术。随着数字摄影技术的发展,图像去噪变得越来越重要。传统的图像去噪算法通常假设加性白高斯噪声(AWGN)过程独立于实际的RGB值。但是,这种方法不能有效地去除今天的CCD数码相机产生的颜色噪声。
本文提出了一种统一的框架,旨在自动估算和去除单幅图像中的颜色噪声。该框架基于分段平滑图像模型,引入了噪声级函数(NLF),该函数描述噪声级别与图像亮度之间的关系。然后,我们通过拟合每个分段图像方差的标准差来估算实际NLF的上界。
在去噪过程中,我们使用投影像素值到每个分段RGB值的线性拟合来显著地去除颜色噪声的色度分量。然后,我们构建了一个高斯条件随机场(GCRF),以从嘈杂的输入图像中获得基础清洁图像。
本文还进行了广泛的实验,以Evaluate该算法的性能。实验结果表明,该算法优于当前最先进的去噪算法。
本文的贡献在于:
1. 提出了一个统一的框架,自动估算和去除单幅图像中的颜色噪声。
2. 引入了噪声级函数(NLF),描述噪声级别与图像亮度之间的关系。
3. 使用高斯条件随机场(GCRF)来获得基础清洁图像。
4. 实验结果表明,该算法优于当前最先进的去噪算法。
本文的结论是,提出的算法可以有效地去除单幅图像中的颜色噪声,提高图像质量。
知识点:
1. 图像去噪的重要性
图像去噪是图像处理领域中的一项重要技术,旨在去除图像中的噪声,提高图像质量。
2. 传统图像去噪算法的局限性
传统的图像去噪算法通常假设加性白高斯噪声(AWGN)过程独立于实际的RGB值。但是,这种方法不能有效地去除今天的CCD数码相机产生的颜色噪声。
3. 噪声级函数(NLF)
噪声级函数(NLF)是描述噪声级别与图像亮度之间的关系的连续函数。
4. 高斯条件随机场(GCRF)
高斯条件随机场(GCRF)是一种概率图模型,用于描述图像中的噪声和清洁图像之间的关系。
5. 图像去噪算法的评估
图像去噪算法的评估通常通过峰值信噪比(PSNR)和结构相似性指数(SSIM)等指标来进行。
3.3 Boundary Blur Estimation
If we merely use per-segment affine reconstruction, the
reconstructed image has artificial boundaries, and the
original boundaries would be artificially sharpened. To
avoid that, we estimate the blur from the original image in
the following way. For each hypothesized blur b from
b
min
ð¼ 0Þ to b
max
ð¼ 2:5Þ in steps of bð¼ 0:25Þ, we compute
the blurred image f
blur
ðv; bÞ¼fðvÞGðu; bÞ, where Gðu; bÞ
is a Gaussian kernel with sigma b. We then compute the
error image I
err
such that I
err
ðv; bÞ¼kIðvÞf
blur
ðv; bÞk
2
.
We dilate each boundary curve C
ij
five times into regions
i
and
j
to obtain a mask
ij
. The best blur b
ij
for C
ij
corresponds to the minimum aggregate error I
err
ðv; bÞ over
ij
or b
ij
¼ arg min
b
P
v2
ij
I
err
ðv; bÞ.
To reinstate the blur in the transition region
ij
,we
simply replace fðvÞ with f
blur
ðv; b
ij
Þ. Note that this assumes
that the amount of blur in
i
and
j
is the same, which is
strictly not true in general. However, we found that this
approximation generates satisfactory results. After this
process is done for every pair of region s, we obtain
boundary blurred piecewise affine reconstruction f
blur
ðvÞ.
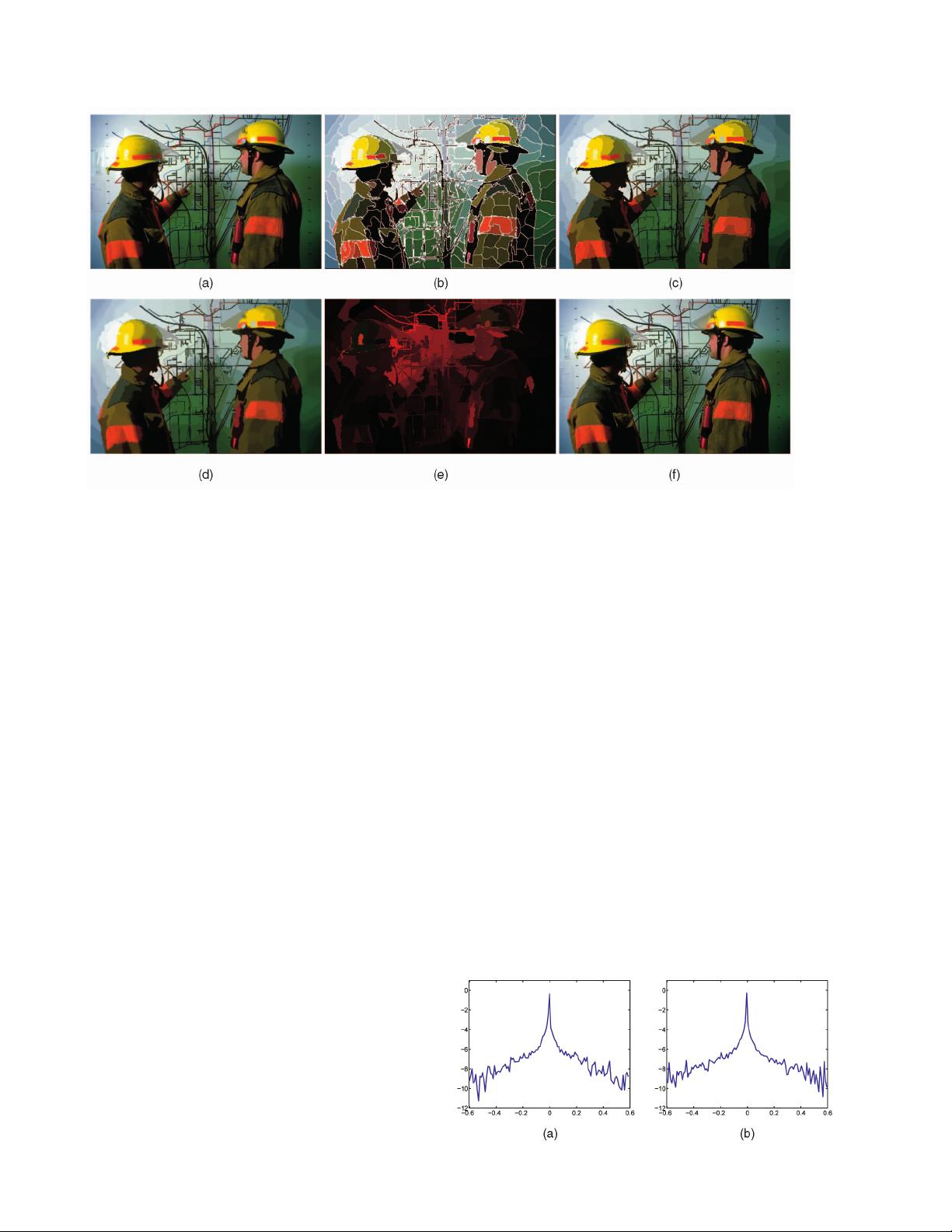
The piecewise smooth image model is illustrated in
Figs. 1a, 1b, 1c, and 1d. The example image (Fig. 1a) taken
from Berkeley image segmentation database [32] is parti-
tioned to piecewise smooth regions (Fig. 1b) by the segmenta-
tion algorithm. The per-segment affine reconstruction is
shown in Fig. 1c, where we can see artificial boundaries
between regions and the true boundaries are sharpened. After
blur estimation and reinstatement in Fig. 1d, the boundaries
become much smoother.
3.4 Important Properties of the Piecewise Smooth
Image Model
There are three important properties of our piecewise
smooth image model that led us to choose it as the model
for both noise estimation and removal. They are
1. the piecewise smooth image model is consistent with
a sparse image prior;
2. the color distribution per each segment can be well
approximated by a line segment, due to the physics
of image formation [26], [24], [20]; and
3. the standard deviation of residual per each segment
is the upper bound of the noise level in that segment.
The last property follows from (3). For the first two
properties, we again use the example image in Fig. 1a to
examine them. For the reconstructed image (Fig. 1d), we
compute the log histograms of the horizontal and vertical
derivatives and plotted them in Fig. 2. The long tails clearly
show that the piecewise smooth reconstruction match the
high-kurtosis statistics of natural images [33]. This image
model also shares some similarity with the so-called dead
leaves model [29].
For the second property, we compute the eigenvalues and
eigenvectors of the RGB values f IðvÞg in each region. The
eigenvalues are sorted in descending order and displayed in
Fig. 1e. Obviously, the red channel accounts for the majority
of the RGB channels, a fact that proves the first eigenvalue of
each segment is significantly larger than the second eigenva-
lue. Therefore, when we project the pixel values onto the first
302 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 2, FEBRUARY 2008
Fig. 1. Illustration of piecewise smooth image model. (a) Original image. (b) Segmentation. (c) Per-segment affine reconstruction. (d) Affine
reconstruction plus boundary blur. (e) The sorted eigenvalues in each segment. (f) RGB values projected onto the largest eigenvector.
Fig. 2. The log histograms of the (a) horizontal and (b) vertical derivative
filter responses of the reconstruction in Fig. 1d.
剩余15页未读,继续阅读
2020-06-16 上传
2011-06-21 上传
2017-06-17 上传
2023-05-19 上传
2023-06-03 上传
2023-06-03 上传
2023-06-03 上传
2023-04-28 上传
2023-05-04 上传

bluegirl77
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
