
采用光电传感器的智能车控制研究采用光电传感器的智能车控制研究
本文是根据第三届全国大学生“飞思卡尔”杯智能汽车大赛要求设计自主识别道路的智能车。
引言引言
本文是根据第三届全国大学生“飞思卡尔”杯智能汽车大赛要求设计自主识别道路的智能车。整个系统采用了组委会提供的16位
单片机mc9s12dg128为核心,模型车本身带有差速器和后轮驱动,需要设计完成基于单片机的自动控制系统使得模型车在封
闭的跑道上自主循线运行。
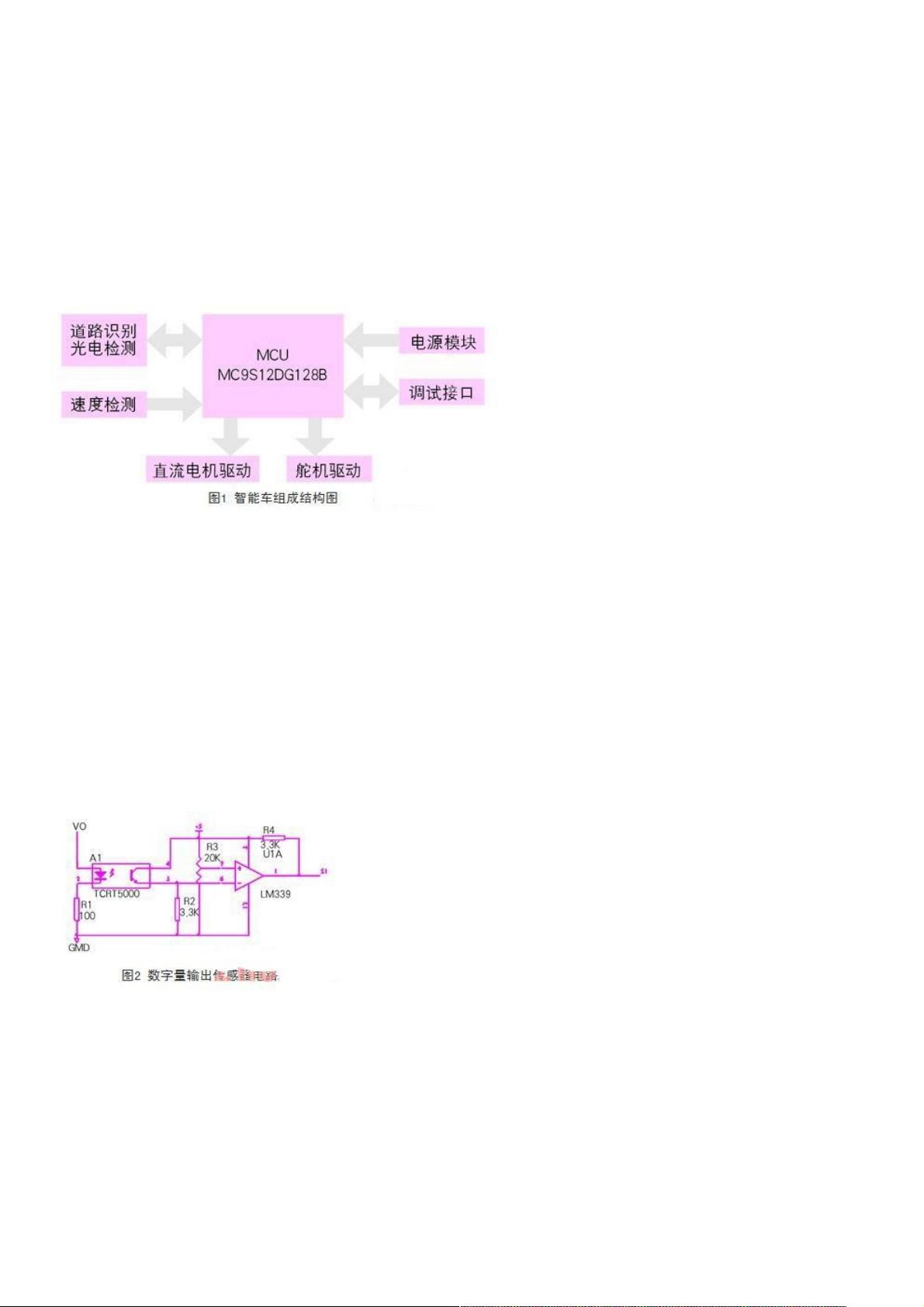
车模与控制器构成一个自动控制系统,如图1,系统硬件以单片机为核心,配有传感器、执行机构以及它们的驱动电路,而信
息处理与控制算法由单片机软件完成[1]。系统设计要求单片机把路径的迅速判断、相应的转向伺服电机控制以及直流驱动电
机的控制精密的结合在一起。
智能车的设计是在保证模型车可靠运行的前提下,以电路设计简洁、车体灵活性高为原则。设计的两大重点,一是光电传感器
的布局和电路设计,一是循线控制算法的设计。
本文第二节主要介绍了光电传感器的电路设计和布局,这是信号采集的关键,相当于智能车的“眼睛”;第三节主要介绍了循线控
制算法,这是控制的核心,相当于智能车的“头脑”;最后在第四节对智能车的硬件、软件设计及实验情况进行了大体说明。
光电传感器光电传感器
光电传感器的选择及电路设计
光电传感器位于智能车的最前方,起到预先判断路径的作用。其发射的光对白色和黑色有不同的反射率,因此能得到不同的电
压值,采进单片机后通过一定的算法比较电压来判断黑线的位置,从而控制舵机的转动[2]。这种方法易于实现,响应速度
快,实时性好,成本低。
本文选用性价比基本适合的反射式红外传感器tcrt5000。红外光电传感器电路的设计形式多种多样,由于本文算法中采用的是
传感器阵列经验判断方法,为了控制简便采用数字量输出传感器电路,如图2所示。
光电管采用脉冲调制式发光,即vo是震荡电路产生的脉冲电压,这样易滤除外界干扰。虽然电路相对复杂,但足以保证模型
车的稳定行驶[3]。
光电传感器布局的研究光电传感器布局的研究
光电管阵列的布局直接影响智能车的循线效果。一般来说,典型的布局有“一”字形布局和“w”形布局两种。
所谓“一”字形布局,就是把多个传感器按照“一”字排开。这种传感器布局方式最常见,算法在理论上易于实现。其不足之处在
于:对赛道的曲率几乎没有任何预测功能。因此一般不采用这种布局。
而“w”形布局,是把多个传感器按照“w”形排列。“w”形布局由于传感器分布在两排,使得智能车对弯道有一定的预测功能,这
种预测功能特别体现在直道进入弯道时刻。后一排传感器仍在直道时,前一排传感器已经进入弯道。而不足之处是增加了控制
算法的复杂程度,判断舵机的旋转方向时,往往需要上一次的检测数据。经验判断的可能性也随着传感器数量的增加而增加。
光电传感器布局仿真光电传感器布局仿真
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38655309
- 粉丝: 5
- 资源: 904
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


