马尔可夫决策过程:理论与应用
需积分: 9 117 浏览量
更新于2024-07-23
收藏 1.18MB PDF 举报
马尔可夫决策过程(Markov Decision Process, MDP)是一种在计算机科学中广泛应用的数学模型,用于处理那些决策者能够控制部分随机环境中的问题。MDPs由四个关键元素组成:状态集E、动作集A、转移概率分布Pr和奖励函数R。以下是这些元素的详细解释:
1. **状态集** (States, E): MDP中的环境由一组完全可观测的状态集合E构成,每个状态代表一个特定的系统或情境。例如,在一个游戏或机器人控制的环境中,状态可能包括棋盘位置、游戏关卡或机器人的传感器读数。
2. **动作集** (Actions, A): 动作集A定义了在每个状态下可以执行的一系列操作或决策,比如移动、选择菜单选项或执行特定操作。
3. **转移概率分布** (Transition Probability, Pr): 这是一个家庭式函数 {Pr(e, a, e') | e ∈ E, a ∈ A(e)},表示在执行动作a后从状态e转移到状态e'的概率。这是一个关键特性,因为它反映了决策对环境动态的影响不确定性。
4. **奖励函数** (Reward Function, R): R是将每个状态映射到实数的函数,R(e)表示处于状态e时立即获得的奖励。它是MDP的核心目标导向,决策者的策略通常是为了最大化长期累积的奖励。
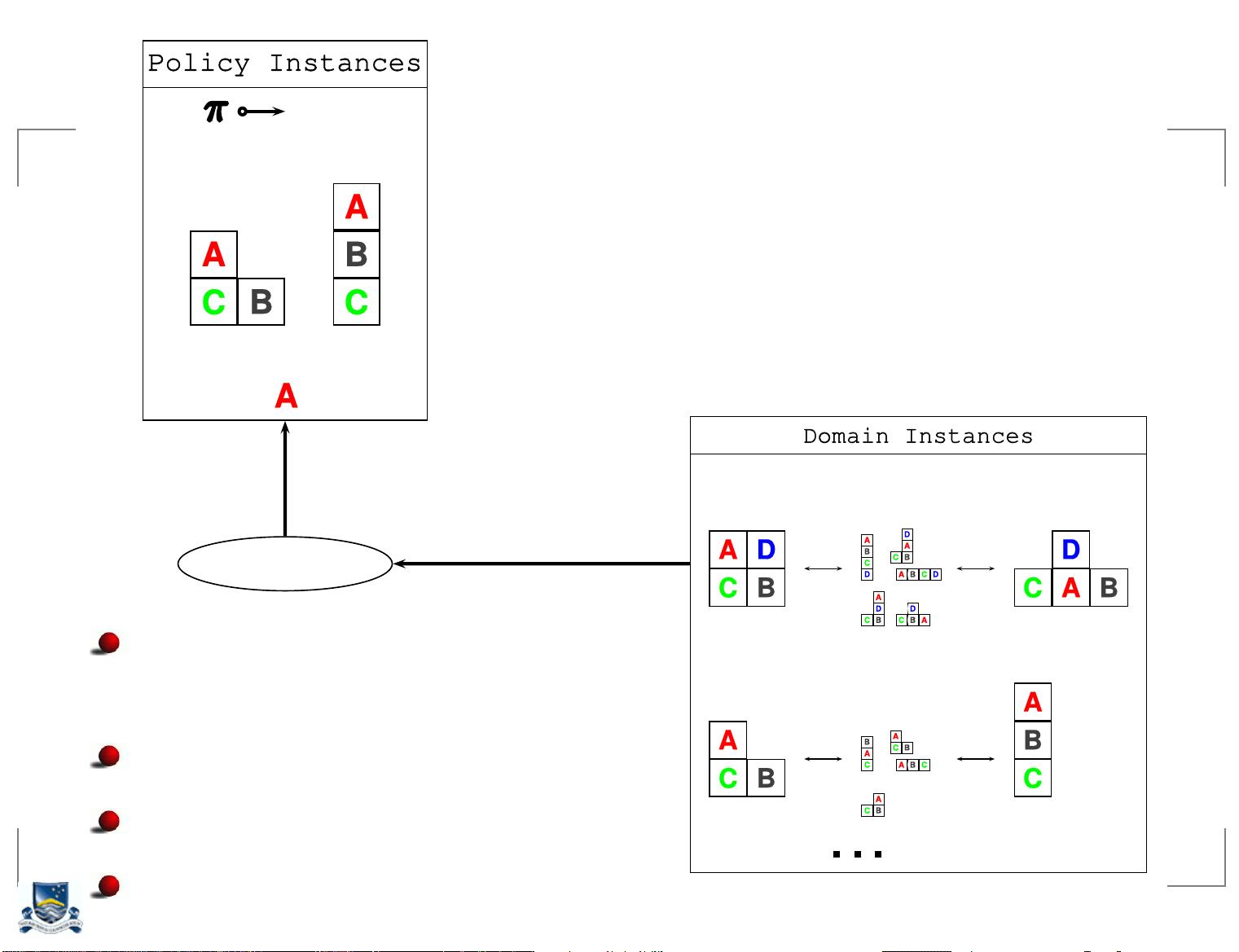
5. **策略** (Policy, π): 一个策略π是从状态E到动作A的映射,即π(e)给出在状态e下应采取的动作。策略可以是确定性的,即总是选择同一个动作,也可以是随机的。
6. **价值函数** (Value Function, Vπ): 给定策略π,每个状态的价值Vπ(e)是其长期期望累计奖励。Vπ(e)通过递归地计算未来奖励的期望值来确定,公式为Vπ(e) = lim(n→∞) E[Σ(γ^t * R(et)) | π, e0 = e],其中γ是折扣因子,用于考虑未来奖励的重要性。
7. **最优策略** (Optimal Policy): 如果一个策略π满足对于所有状态e和所有其他策略π',Vπ(e) ≥ Vπ'(e),那么π就是最优策略,因为它提供了最大的长期期望收益。
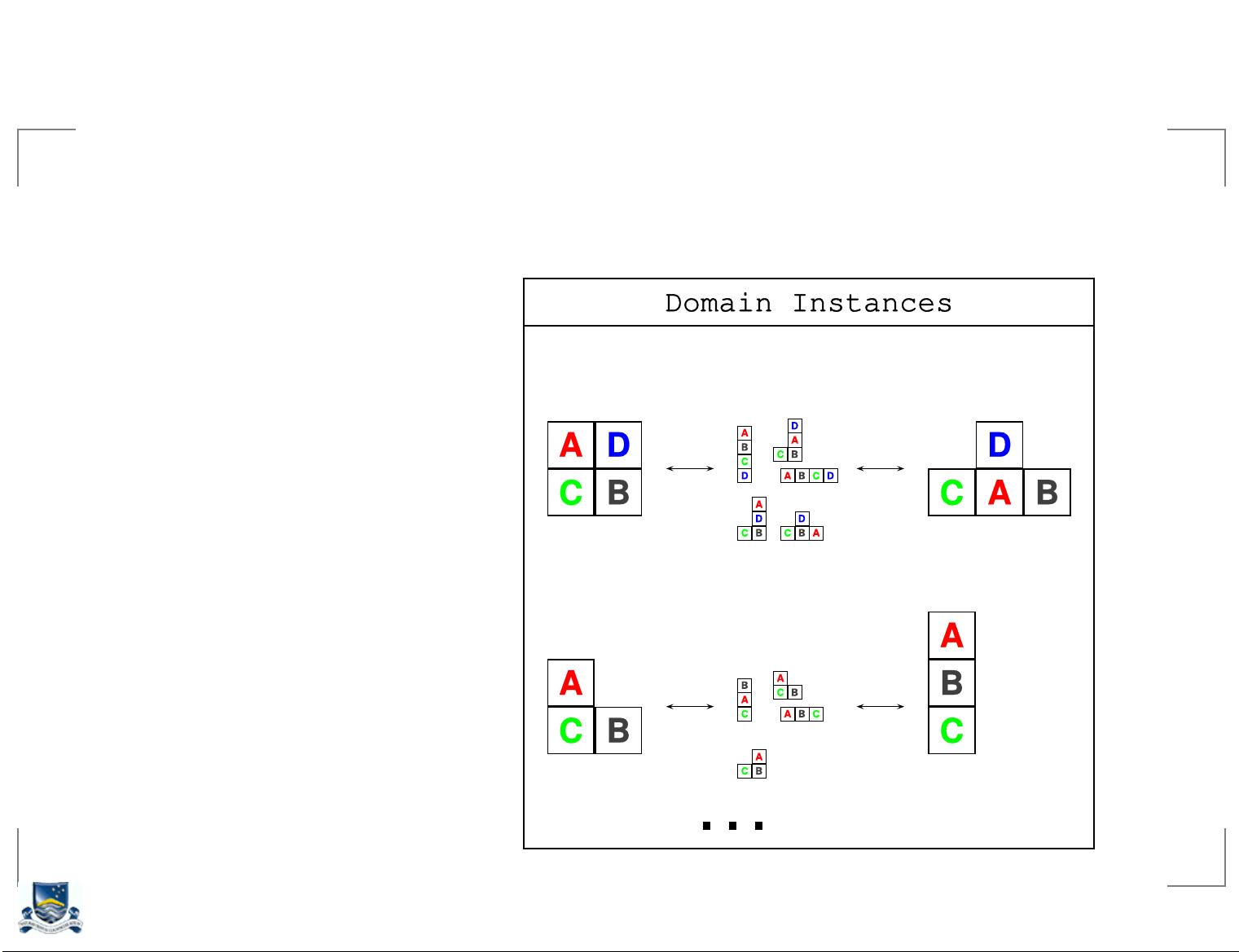
8. **规划(Planning in MDPs)**: MDPs常常与规划算法结合使用,如价值迭代、政策迭代或基于搜索的方法(如深度优先搜索、广度优先搜索)。规划旨在找到或学习一个最优策略,以解决给定的MDP实例。
**规划示例**:
给出的规划示例可能是一个简单的迷宫环境,其中有两个状态S和F,表示起点和终点,以及三个动作move(,), move(A,TAB), move(S,F)和move(F,S)。move(,)表示原地不动,而move(A,TAB)和move(S,F)分别对应向左和向右移动。在每个状态下,move(S,F)的概率较高(0.9),而move(F,S)的概率较低(0.1)。规划的任务是找到一个策略,使得从S出发,通过一系列决策最终到达F,同时最大化累积奖励。
MDPs广泛应用于强化学习、机器人控制、游戏AI等领域,为智能体在不确定环境中做出决策提供了一个理论基础。理解并应用MDPs的关键在于明确问题的结构,设计合理的奖励函数,并选择合适的算法来求解最优策略。
Planning (MDP)
R = 0.0
. . . . . .
R = 10.0
R = 0.0
. . . . . .
R = 10.0
Workshop on Relational Reinforcement Learning – (July 8, 2004) – p. 7/34
剩余35页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-09-08 上传
2022-11-22 上传
2022-03-29 上传
2022-08-03 上传
2024-01-06 上传
2024-05-06 上传

qq_17172957
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- GTScriptableVariable:基于Ryan Hipple的可脚本化变量谈论具有可脚本化对象的游戏体系结构
- notifications-tutorial:Android中用于通知的示例应用
- connecticut_maps:用于创建康涅狄格州可自定义地图的脚本
- discovery_board_api:探索板 API
- MinimalSeedSets:从宏基因组学样品中确定最少的种子集
- 2020成都薪酬标准指南精品报告2020.rar
- third-party-payment:集成主流的第三方支付(支付宝支付,微信支付,银联支付,京东支付)
- ciu-trabajo集成商
- sbt-scoverage-multiproject-sample:sbt-coverage-multiproject-sample
- Messengo-crx插件
- WatchVideo:我曾经说过持之以恒,就是要坚持下去,不要在半途而废了。哪怕一天一天的积累,我希望一天会看到像种子一样的结果
- 易语言-[JSON解析与生成 / 哈希表]Quick And Simple EC
- OnlineCourses
- design-patterns:Java,OOP基础和原理中的设计模式示例
- 迷宫游戏
- java毕业设计——java基于蚁群算法路由选择可视化动态模拟系统的的设计与实现(论文+开题报告+翻译+外文翻译).zip
