CAN-Bus V2.0规范详解:扩展格式与兼容性
需积分: 12 12 浏览量
更新于2024-07-28
1
收藏 369KB PDF 举报
CAN-Bus规范V2.0版本是针对串行通信在更多应用领域的标准化需求而制定的,旨在提供一种高效、可靠的数据传输机制。CAN(Controller Area Network)总线最初设计用于汽车电子系统,但随着技术的发展,它也被广泛应用于工业控制、物联网等领域。
1. **基本概念**:
规范引入了两种报文格式:标准格式(11位识别位)和扩展格式(29位识别位)。标准格式适用于不需大范围地址的应用,而扩展格式提供了更大的地址空间,方便系统设计师根据实际需求选择。
2. **报文传输**:
- **帧类型**包括数据帧、远程帧、错误帧、过载帧和帧间空间。数据帧用于数据交换,远程帧用于请求发送者重新发送数据,错误帧用于标识错误,过载帧表示接收器无法处理更多的数据,帧间空间保持网络同步。
- **发送器/接收器**的定义明确了设备在网络中的角色,确保数据的正确发送和接收。
3. **报文校验**:
CAN总线使用循环冗余检验(CRC)来确保数据的准确性,通过计算校验码来检查接收到的报文是否完整且无误。
4. **编码与错误处理**:
- **错误检测**包括在接收端检测到错误时,通过错误标志位通知发送方。
- **错误标定**涉及在检测到错误后,发送方可能需要采取措施重发报文,或者接收方可以请求数据重新发送。
5. **故障界定**:
规范规定了错误处理流程,以确定何时出现故障并采取相应措施,如重置网络或关闭有问题的节点。
6. **位定时要求**:
精确的位定时对于CAN总线的稳定运行至关重要,它涉及到数据信号的发送和接收时间。
7. **增加容错性**:
V2.0版本允许对CAN振荡器容差进行调整,以适应不同的硬件环境,同时协议修改也增强了系统的兼容性和鲁棒性。
CAN-Bus规范V2.0版本是一个关键的技术指南,为CAN总线的设计、实现和维护提供了详细的规则,确保了不同系统之间的互操作性和可靠性。无论是标准格式还是扩展格式的应用,都遵循了这一规范,使得设备间的通信更加高效和准确。
广州周立功单片机发展有限公司 Tel: 020-38730976 38730977 Fax:38730925 http://www.zlgmcu.com
- 7 -
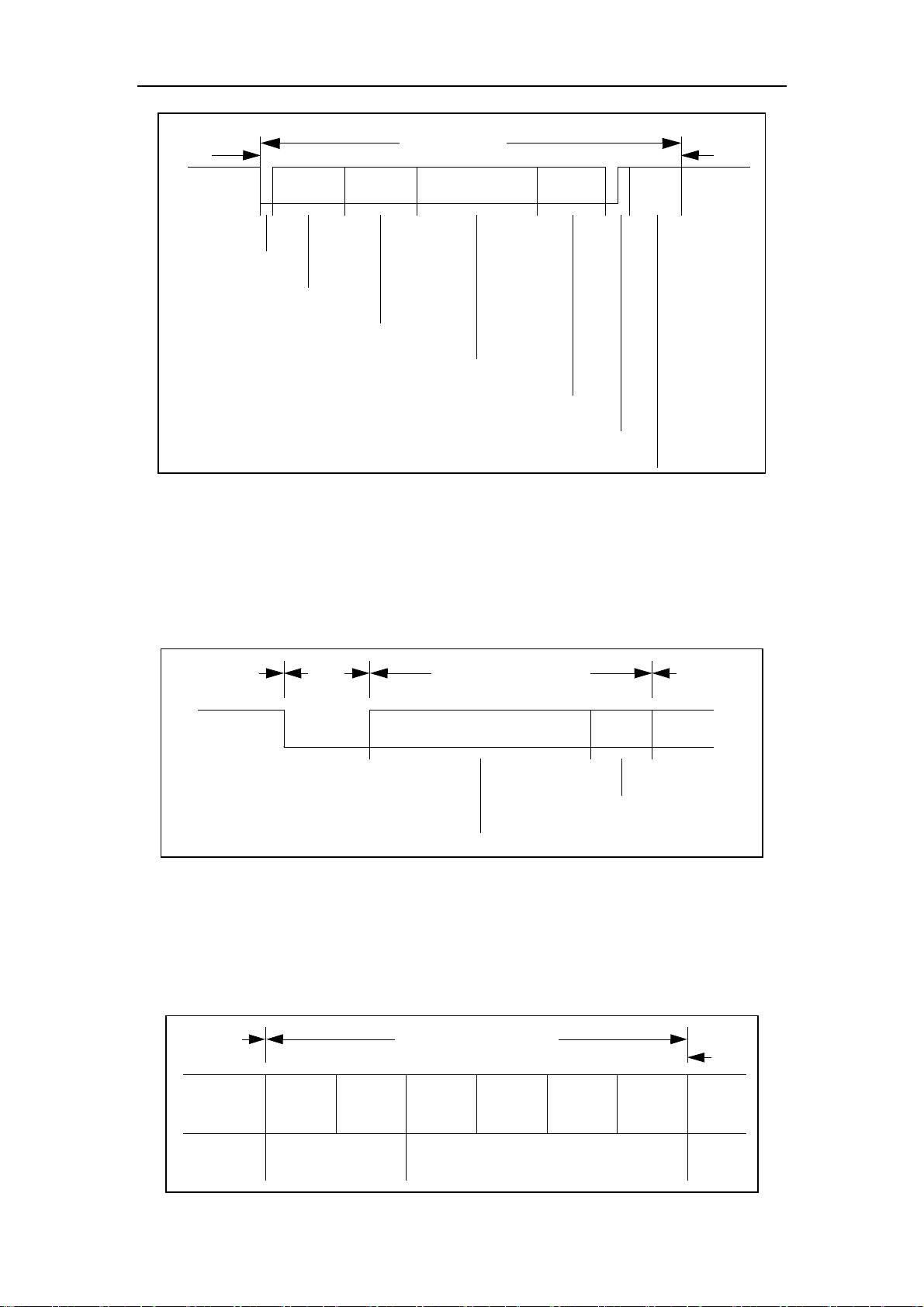
Interframe
Space
Interframe
Space
Start of Frame
Arbitrat ion Field
Cont rol Field
Data Field
CRC F i el d
AC K F ield
End of Frame
or
Overload
Fr a me
DATA F RAME
仲裁场
仲裁场包括识别符和远程发送请求位(RTR)。
识别符:识别符的长度为 11 位。这些位的发送顺序是从 ID-10 到 ID-0。最低位是 ID-0。最高的 7 位
(ID-10 到 ID-4)必须不能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
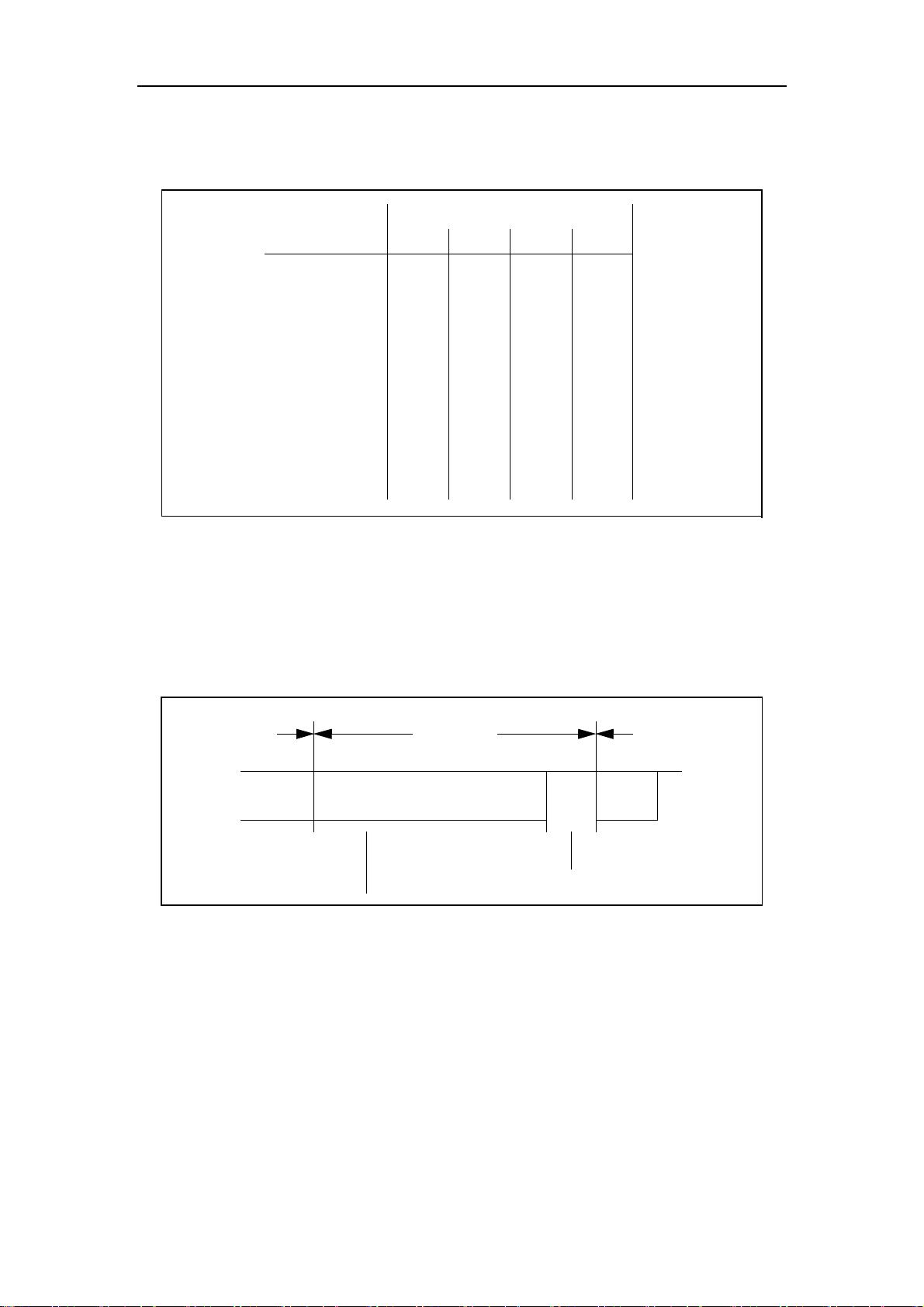
Interframe
Space
St a r t
of Frame
Identifier
RT R B i t
Co n t r o l
Fi e ld
AR BI TRATION F IELD
控制场
控制场由 6 个位组成,包括数据长度代码和两个将来作为扩展用的保留位。所发送的保留位必须为“显
性”。接收器接收所有由“显性”和“隐性”组合在一起的位。
数据长度代码:数据长度代码指示了数据场中字节数量。数据长度代码为 4 个位,在控制场里被发送。
r1 r0 DLC3 DLC2 DLC1 DLC 0
or
CRC
Fi e l d
Ar bit ration
Fi e l d
Dat a
Fi e l d
CO N T RO L F IE L D
Dat a Lengt h Codereserved
bits
剩余35页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2008-11-26 上传
195 浏览量
2017-12-02 上传
2013-05-08 上传
2023-07-26 上传

Jims8
- 粉丝: 2
- 资源: 27
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
