
flyinsky518
单
应
性
(homography)
变
换
的
推
导
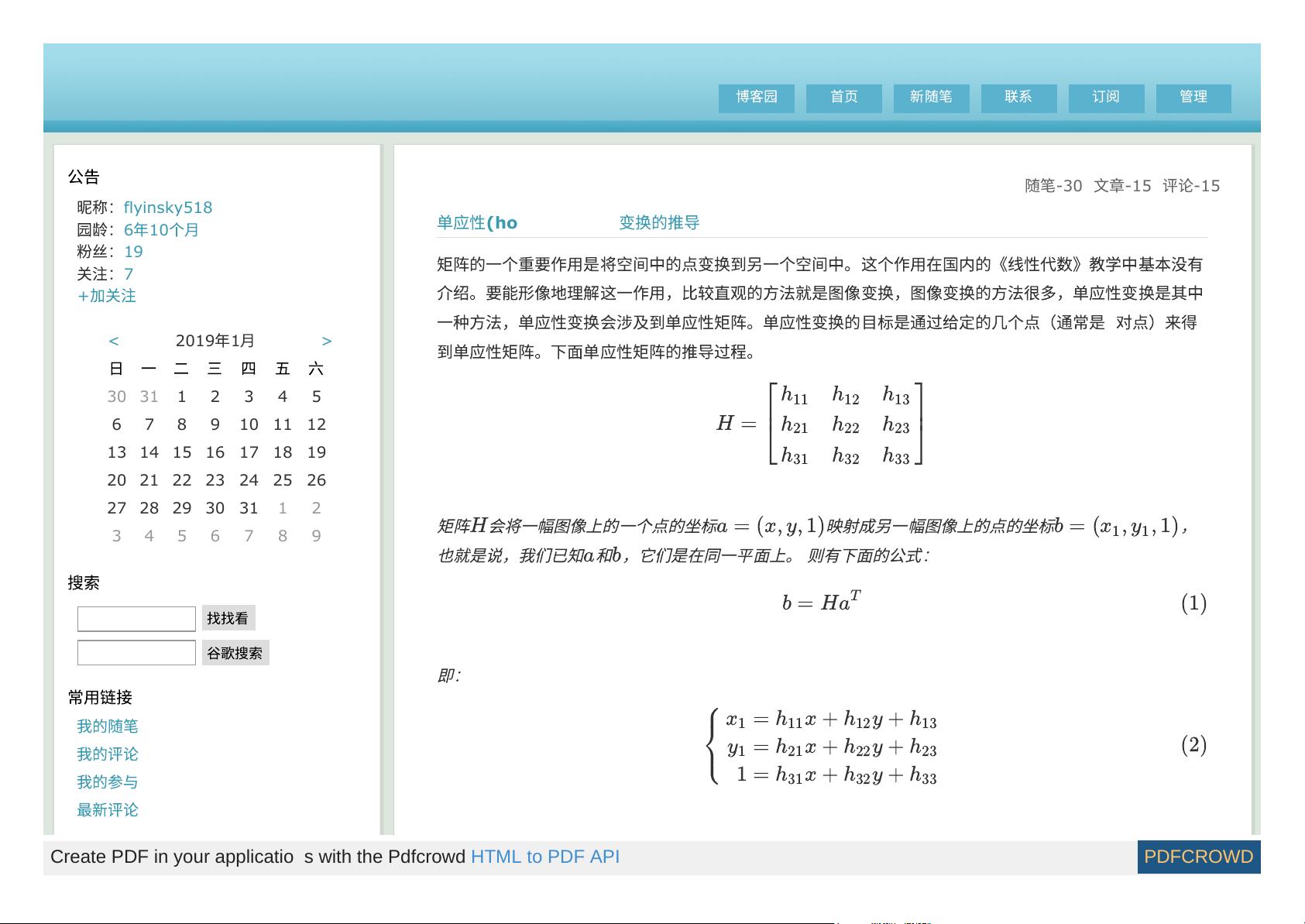
矩
阵
的
⼀个
重
要
作
⽤
是
将
空
间
中
的
点
变
换
到
另
⼀个
空
间
中
。
这
个
作
⽤
在国
内
的
《
线
性
代
数
》
教
学
中
基
本
没
有
介
绍
。
要
能
形
像
地
理
解
这
⼀
作
⽤
,
⽐
较
直
观
的
⽅
法
就
是
图
像
变
换
,
图
像
变
换
的
⽅
法
很
多
,
单
应
性
变
换
是
其
中
⼀
种
⽅
法
,
单
应
性
变
换
会
涉
及
到
单
应
性
矩
阵
。
单
应
性
变
换
的⽬
标
是
通
过
给
定
的
⼏
个
点
(
通
常
是
4
对
点
)
来
得
到
单
应
性
矩
阵
。
下
⾯
单
应
性
矩
阵
的
推
导
过
程
。
矩
阵
会
将
⼀
幅
图
像
上
的
⼀个
点
的
坐
标
映
射
成
另
⼀
幅
图
像
上
的
点
的
坐
标
,
也
就
是
说
,
我
们
已
知
和
,
它
们
是
在
同
⼀
平
⾯
上
。
则
有
下
⾯
的
公
式
:
即
:
博
客
园
⾸
⻚
新
随
笔
联
系
订
阅
管
理
随
笔
-30
⽂
章
-15
评论
-15
H
=
⎡
⎣
⎢
h
11
h
21
h
31
h
12
h
22
h
32
h
13
h
23
h
33
⎤
⎦
⎥
H
a
= (
x
,
y
,1)
b
= ( , ,1)
x
1
y
1
a
b
b
=
H
a
T
(1)
⎧
⎩
⎨
=
x
+
y
+
x
1
h
11
h
12
h
13
=
x
+
y
+
y
1
h
21
h
22
h
23
1 =
x
+
y
+
h
31
h
32
h
33
(2)
公
告
昵
称
:
flyinsky518
园
龄
:
6
年
10
个
⽉
粉
丝
:
19
关
注
:
7
+
加
关
注
< 2019
年
1
⽉
>
⽇
⼀
⼆
三
四
五
六
30 31 1 2 3 4 5
6 7 8 9 10 11 12
13 14 15 16 17 18 19
20 21 22 23 24 25 26
27 28 29 30 31 1 2
3 4 5 6 7 8 9
搜
索
找找
看
⾕
歌
搜
索
常
⽤
链
接
我
的
随
笔
我
的
评论
我
的
参
与
最
新
评论
Create PDF in your applications with the Pdfcrowd HTML to PDF API PDFCROWD
下载后可阅读完整内容,剩余4页未读,立即下载

qq_41918015
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


