基于TMS320F2812的三轴跟踪转台伺服控制系统设计与实现
62 浏览量
更新于2024-08-28
收藏 276KB PDF 举报
"基于TMS320F2812三轴跟踪转台伺服控制系统的设计与实现"
本文主要介绍了基于TMS320F2812三轴跟踪转台伺服控制系统的设计与实现。该系统采用了“交流伺服电机+减速器”代替传统的直流力矩电机直接驱动负载的方式,使用了DSP和CAN总线技术,并采用了上、下位机协同控制的方法,以满足超低速、宽调速、高精度、高可靠性的要求。
知识点一:TMS320F2812微控制器
TMS320F2812是一款基于ARM架构的微控制器,专门用于控制系统应用。它具有高速处理能力、低功耗和小尺寸等特点,广泛应用于工业自动化、机器人、医疗设备等领域。该微控制器具有强大的数字信号处理能力,可以满足高速数据采集和处理的需求。
知识点二:三轴跟踪转台
三轴跟踪转台是一种高精度的机械系统,能够实现三维空间中的跟踪和定位。该系统广泛应用于惯性导航、飞行姿态仿真、机动目标跟踪等领域。三轴跟踪转台的设计和实现需要考虑到机械结构、电机控制、DSP处理等多个方面。
知识点三:CAN总线技术
CAN总线是一种常用的现场总线技术,应用于工业自动化、汽车电子、医疗设备等领域。CAN总线具有高速、可靠、低成本等特点,能够满足高速数据传输和实时控制的需求。在本系统中,CAN总线技术用于实现上、下位机之间的数据交换和控制。
知识点四:DSP处理技术
DSP(Digital Signal Processing)处理技术是一种常用的数字信号处理技术,应用于音频、图像、控制系统等领域。该技术能够实现高速数据采集、处理和分析,满足高速控制和实时处理的需求。在本系统中,DSP处理技术用于实现高速数据采集和处理。
知识点五:硬件设计
硬件设计是指根据系统要求设计和实现硬件电路的过程。在本系统中,硬件设计需要考虑到电机控制、DSP处理、CAN总线等多个方面。硬件设计的目的是实现系统的可靠性、稳定性和高效性。
知识点六:软件设计
软件设计是指根据系统要求设计和实现软件程序的过程。在本系统中,软件设计需要考虑到DSP处理、CAN总线通信、电机控制等多个方面。软件设计的目的是实现系统的可靠性、稳定性和高效性。
知识点七:上、下位机协同控制
上、下位机协同控制是一种常用的控制方法,应用于机器人、自动化设备等领域。该方法能够实现高速控制和实时处理,满足系统的可靠性和高效性要求。在本系统中,上、下位机协同控制方法用于实现高速数据交换和控制。
知识点八:交流伺服电机
交流伺服电机是一种常用的电机类型,应用于工业自动化、机器人等领域。该电机具有高速、低噪音、低振动等特点,能够满足高速控制和实时处理的需求。在本系统中,交流伺ervo电机用于实现高速控制和实时处理。
本文介绍了基于TMS320F2812三轴跟踪转台伺服控制系统的设计与实现。该系统采用了先进的DSP处理技术、CAN总线技术、交流伺服电机等技术,能够满足超低速、宽调速、高精度、高可靠性的要求。
基于基于TMS320F2812三轴跟踪转台伺服控制系统的设计与实现三轴跟踪转台伺服控制系统的设计与实现
Design of the Servo Control System of the Three-axis Trace Table Based on TMS320F2812
Abstract:A design method of the three-axis tracking table servo system based on TMS320F2812 is introduced in this
paper. A new load-drive method-“AC servo motor + Reducer” is adopted instead of the “DC torque motor direct drive”
method which is widely used in traditional control system for tracking table. To improve the performances of the system, a
high speed processor TMS320F2812 which was specialized for control system is used. Besides, the servo-client distributed
network is used. All of these aim at higher performance during low-speed tracking, broad speed range for tracking, more
reliable and more accurate.
Keywords: Three-axis tracking table; TMS320F2812; hardware design; software design.
摘要:本文介绍了基于TMS320F2812三轴跟踪转台伺服控制系统的设计与实现。采用“交流伺服电机+减速器”代替转台传统的
直流力矩电机直接驱动负载的方式;运用DSP和CAN总线技术;利用上、下位机协同控制的方法,使系统能够满足超低速、
宽调速、高精度、高可靠性的要求。
关键词:三轴跟踪转台;TMS320F2812;硬件设计;软件设计
0 引言
目前国内外的转台大多应用于惯性导航领域以及飞行姿态仿真系统。而机动目标跟踪也已经越来越为人们所重视,在现代化技
术中,尤其是在国防技术中,有着举足轻重的作用。我国从六七十年代开始就开始自行研制三轴液压转台,到80年代开始出
现电液伺服控制系统转台和伺服电机控制电机控制系统转台。转台逐步朝着高精密、高准确性的方向发展,而且随着航天和航空技术的
发展,以及车载、舰载对转台体积的要求,转台也逐渐开始小型化、智能化。
目标跟踪系统是直瞄武器的“眼睛”,其对机动目标跟踪的准确度,直接影响到武器系统的射击命中率。一般跟踪系统为一个转
台,跟踪转台在空间沿三个坐标轴的平移量对目标的跟踪精度影响不大,可以忽略不计。对跟踪精度影响比较大的是跟踪转台
的方位和俯仰两个自由度。目前我国高炮上装备的大部分转台机构就是只考虑了方位和俯仰两个自由度。
在自动目标跟踪系统中,为了能够识别目标,需要对跟踪系统传感器采集到的数据进行图象识别,如果忽略横滚向的影响,而
采用两自由度转台,会造成采集到的图像发生扭曲失真,加大图像处理的难度。而且当车体在地面上行进或者舰船在海上航行
时,都会由于路面或海浪而引起横滚向的偏移。因此为了减小图像处理的难度,抵消车体或舰船在横滚向的偏移,在自动跟踪
系统中应该采用三自由度的跟踪转台,即包括方位、俯仰和横滚三个自由度。
1 三轴跟踪转台系统设计
目前国内外绝大部分的电动转台均采用直流力矩电机直接驱动负载的方式。这种控制方法的特点是电机的输出轴不需要加减速
器,直接驱动负载,避免了由减速器的回程间隙带来的误差,然而它的缺点是,跟踪速度完全决定于力矩电机稳定转速范围,
低速性能不佳,当低速跟踪时会出现“爬行”现象,而且成本较高。本文将采用一种“交流伺服电机+减速器”的驱动方式。由于交
流伺服电机技术的发展,现在市场上的交流伺服电机的调速范围很宽,如松下交流伺服电机,稳定转速为1转/分到5000转/
分,如果经过一个速比超过150的减速器减速后,最低跟踪速度能达到0.04°/s。理论上能使系统的低速性能提高一个数量级。
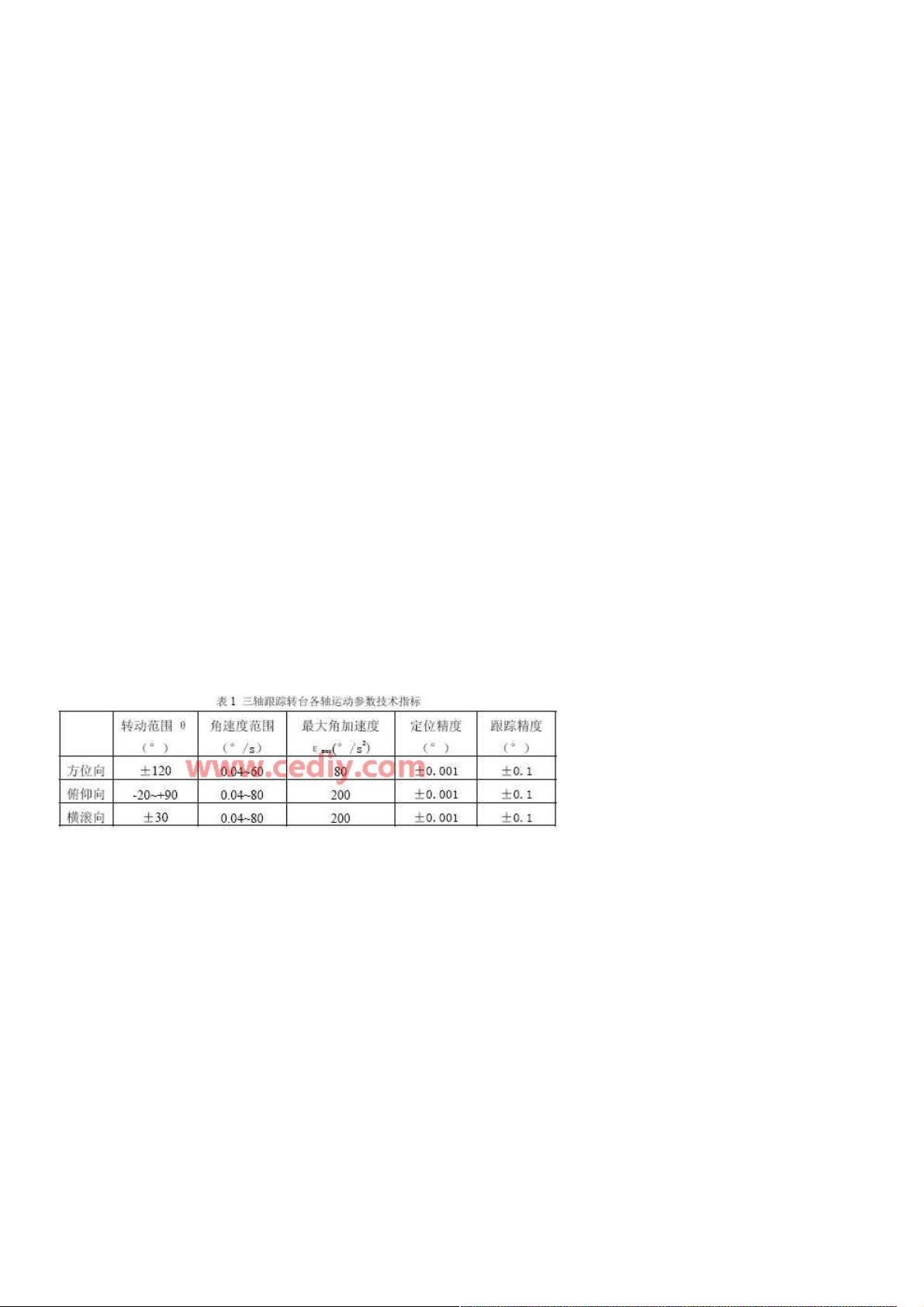
表1为三轴跟踪转台的各轴运动参数技术指标。
图1为三轴跟踪转台的三维效果图,图示位置为平衡位置,转台总体尺寸约为Φ700mm*650mm。负载为CCD图像传感器及镜
头,重量约5kg。底座为圆盘形,留有固定螺栓孔,方便安装。三轴跟踪转台为UUT结构,外框为音叉结构,完成方位向旋转
运动,由安装在底座的方位向电机控制电机控制;中框为U型架,通过轴承支撑在外框之间,完成俯仰向旋转运动,由安装在外框一侧
的俯仰向电机控制电机控制;横滚轴通过中框中心,CCD摄像头安装在支撑平板上,平板固定在通过法兰固定在横滚轴上,由横滚
向电机控制电机控制。CCD镜头的中心线与横滚轴的轴线重合。横滚轴、俯仰轴、方位轴的轴线延长线交于一点,这样就避免会出现
耦合现象。这种结构的特点是,CCD平台的前方没有遮挡,视野开阔,拆装方便。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
125 浏览量
173 浏览量
195 浏览量
255 浏览量
2020-07-31 上传
686 浏览量

weixin_38741195
- 粉丝: 2
- 资源: 970
 我的内容管理
展开
我的内容管理
展开







最新资源
- win_udp:Windows网络udp框架服务器和侦听器
- 如何规划团队训练课程PPT
- torch_cluster-1.5.5-cp36-cp36m-linux_x86_64whl.zip
- 取Excel表格有数据单元格的起讫行列.rar
- zencharts:将 High Charts 库的强大功能与 Zendesk Developer API 相结合的小型应用程序
- wild-rydes:野生莱德
- Redosnap Launcher-crx插件
- CNN_for_brain_ventricles_segmentation:“个人3D脑图集”项目。 利用全卷积神经网络对大脑的CT数据进行分割
- 批量修改文件名.zip
- 取Excel表格有数据单元格的起讫行、列.rar
- html2text:用 Go 编写的 html 到文本转换器
- torch_scatter-2.0.4-cp37-cp37m-win_amd64whl.zip
- Email Notifier-crx插件
- yun-text:“云杯”景区声誉评价得分预测中第三个解决方案的DL部分
- milestoneproject2-memorygame:一种记忆游戏,要求用户匹配隐藏在牌组中的成对纸牌
- Android Binder通信案例
