事件视觉教程:高速机器人高精度感知
需积分: 9 197 浏览量
更新于2024-07-14
1
收藏 4.15MB PDF 举报
本篇教程是关于事件视觉(Event-based Vision)在高速机器人领域中的应用,由瑞士苏黎世大学的Davide Scaramuzza教授及其机器人与感知小组(Robotics and Perception Group, RPG)提供。Davide Scaramuzza的研究领域包括自主飞行器导航(如AURO'12, RAM'14, JFR'15a-b)、敏捷飞行中的事件视觉技术(如IROS'3, ICRA'14-15, RSS'15)、视觉与惯性状态估计与地图构建(T-RO'08, IJCV'11, PAMI'13, RSS'15)以及航空与地面机器人协作(IROS'13, SSRR'14)。他强调了事件相机(如DVS和DAVIS)的重要性,这些相机是一种新型传感器,它们的工作原理基于事件数据而非传统帧频图像,具有高动态范围、低功耗和实时性能优势。
该教程首先阐述了事件视觉的动机,旨在解决传统相机在高速运动或光照变化场景下的局限性。事件相机通过生成器模型来捕获光的变化,这使得它们能够在极端条件下工作。教程深入讲解了事件相机的校准方法,确保了数据的准确性和一致性。此外,还包括了对事件数据的可视化处理,帮助科研人员理解和分析事件流。
核心部分探讨了事件视觉在自动驾驶领域的进展,例如通过与KIVA's Robotics Warehouse的机器人和火星探测器的案例,展示了事件视觉如何提升自主导航的性能。对于当前的研究,Davide Scaramuzza关注于利用事件视觉与视觉惯性测量单元(IMU)的融合,以提高机器人系统的定位精度和稳定性。
最后,教程展望了事件视觉技术在未来机器人技术中的潜力,尤其是在自主驾驶汽车(如Google Car)和自主机器人感知能力的提升上。通过对过去、现在和未来的发展路径进行对比,读者可以更好地理解这一新兴技术在推动自主机器人技术进步中的关键作用。
总结来说,这篇教程提供了深入浅出的指导,涵盖了事件视觉的基础理论、实践应用和前沿研究,对希望在这个领域探索的工程师和研究人员具有很高的价值。通过学习,读者不仅可以掌握事件相机的工作原理,还能了解到如何将其有效地融入到高速机器人系统中,以实现更高效、精准的自主导航和感知。
Davide Scaramuzza - University of Zurich – Robotics and Perception Group - rpg.ifi.uzh.ch
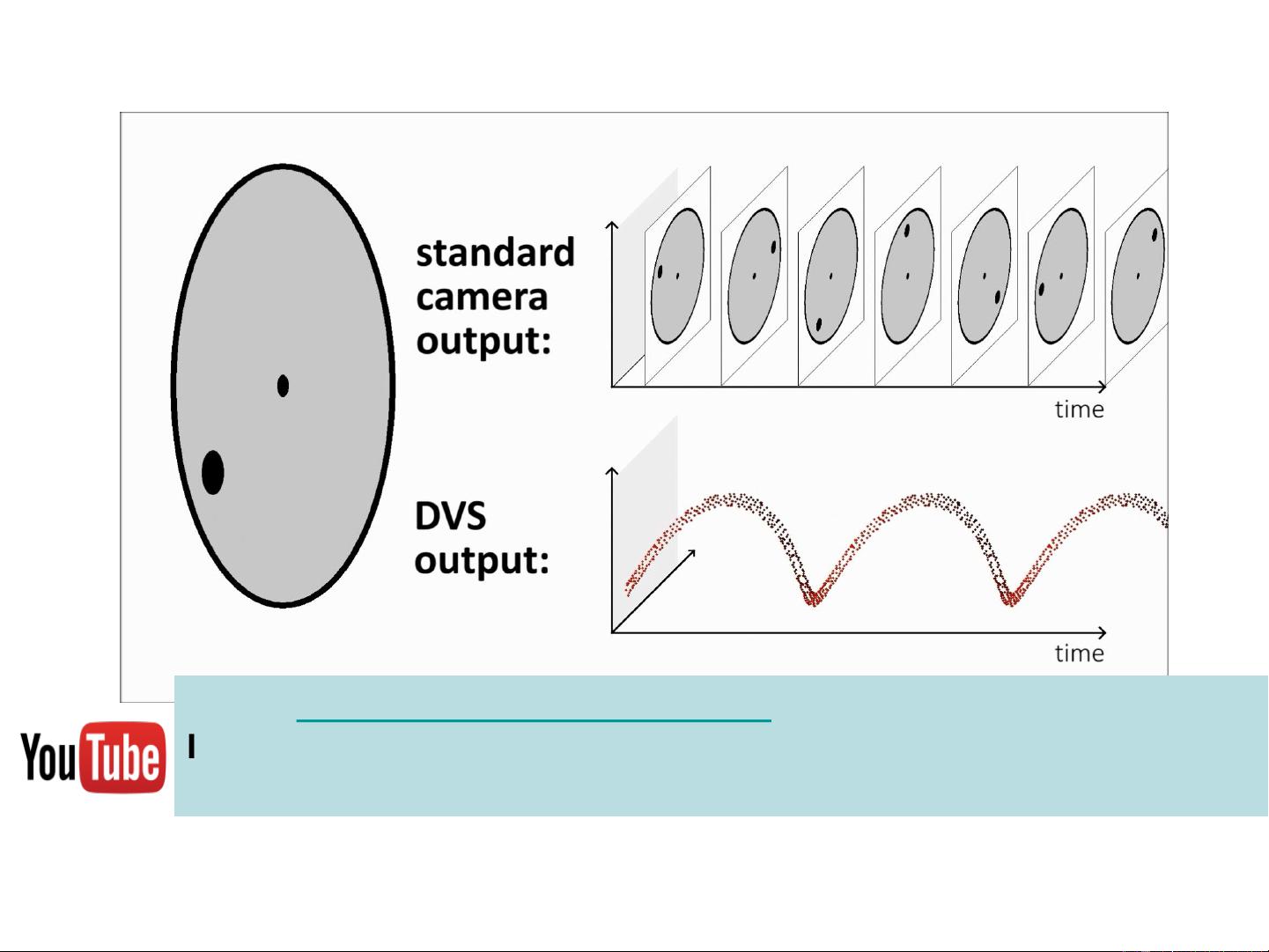
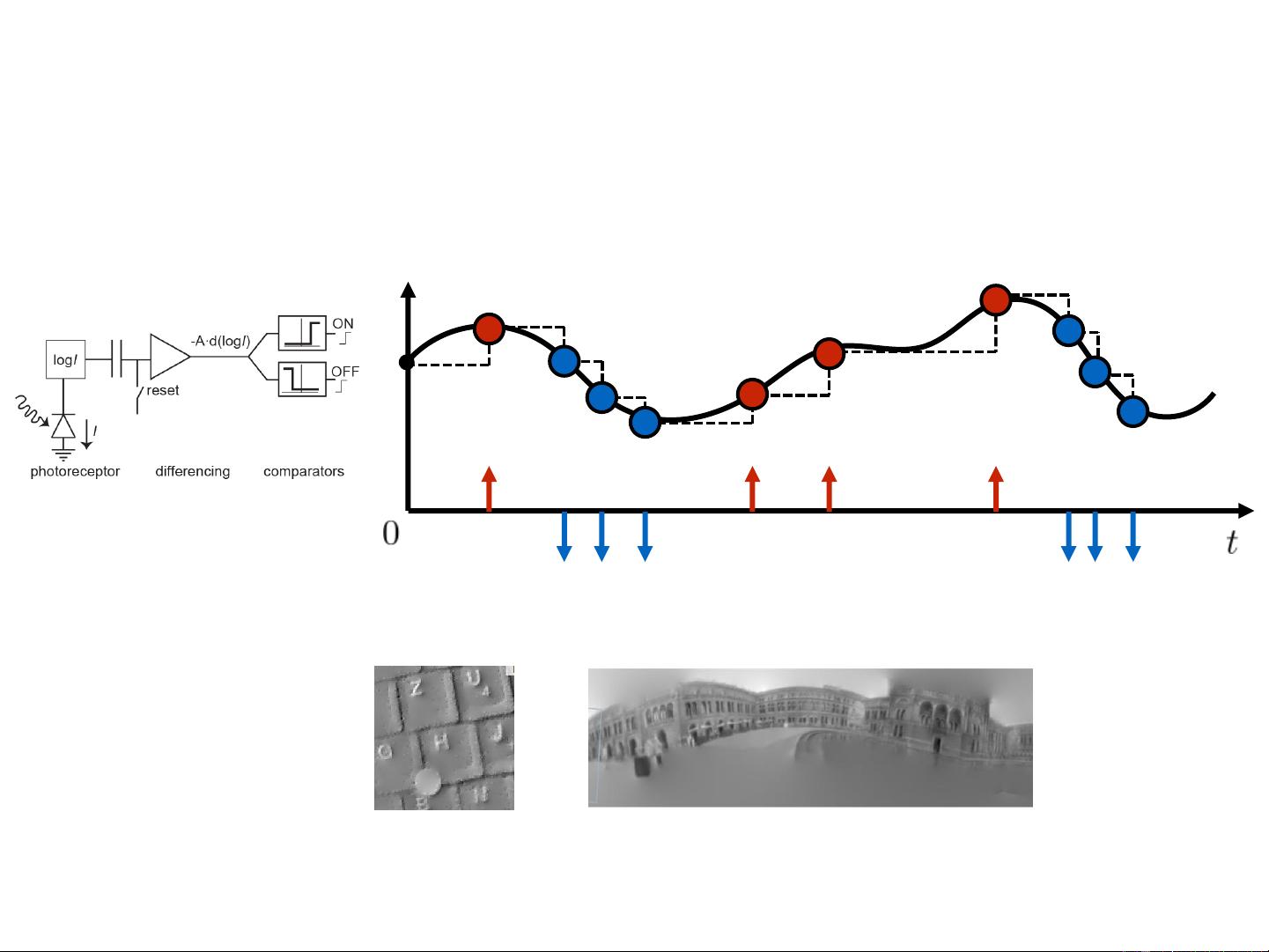
By contrast, a DVS outputs asynchronous events at microsecond resolution.
An event is generated each time a single pixel changes value
A traditional camera outputs frames at fixed time intervals:
time
frame
next frame
Camera vs DVS
time
events stream
event:
sign (+1 or -1)
[Censi & Scaramuzza, Low Latency, Event-based Visual Odometry, ICRA’14]

剩余77页未读,继续阅读
2019-11-10 上传
2019-12-11 上传
2023-08-02 上传
2023-07-14 上传
2023-06-06 上传
2023-05-10 上传
2023-04-17 上传
2023-04-26 上传
2023-03-28 上传

gwpscut
- 粉丝: 3493
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
