"埃斯顿机器人操作手册(示教器操作)及版本修订记录"
需积分: 5 124 浏览量
更新于2024-01-24
7
收藏 6.55MB PDF 举报
《埃斯顿机器人操作手册(示教器操作);埃斯顿机器人操作手册(示教器操作);ER 系列工业机器人操作手册 (RCS2V1.5)》是一本涉及埃斯顿机器人示教器操作的手册。该手册的修订记录显示,第一版于2018年8月发布,现已发展到了第五版,最新版本是2019年7月发布的V1.5。
在第一版中,手册主要介绍了埃斯顿机器人的基础操作,包括示教器的使用方法和一些常用的指令。随着版本的不断更新,手册内容也得到了丰富和改进。在V1.1版中,增加了一点到达功能,使机器人能够更加精确地定位目标点。同时,将"GetTrackId"和"Tracking"两个指令合并为一个"Tracking"指令,简化了指令操作流程。另外,对三维视觉使用进行了修改和扩充,增加了机器人作服务器、视觉设备作客户端的使用介绍,提高了视觉指令的灵活性。此外,还增加了取整指令,方便用户进行数据处理。
在V1.2版中,手册进一步增加了简单码垛功能,使机器人能够进行简单的堆码操作。同时,对"waitcondition"和"waitDI"指令的参数描述进行了修改,提高了操作的准确度。另外,在变量操作、"RUN"指令描述和锁机功能方面也进行了调整和优化,提高了机器人的操作效率和安全性。
V1.3版引入了工程导入导出功能,使用户能够更方便地管理自己的工程项目。此外,还新增了一些指令,增加了一点对正、视觉跟随、九点标定等高级功能,提供了更多的操作方式和选择。这些新增功能和指令能够满足用户在复杂场景下的需求。
在V1.4版中,手册进一步增加了多工位预约功能,使用户能够更灵活地安排机器人在不同工位之间的任务。同时,对所有运动指令增加了"DEFAULT"的说明,方便用户设置默认参数。此外,还新增了一些指令,提升了机器人的操作能力。
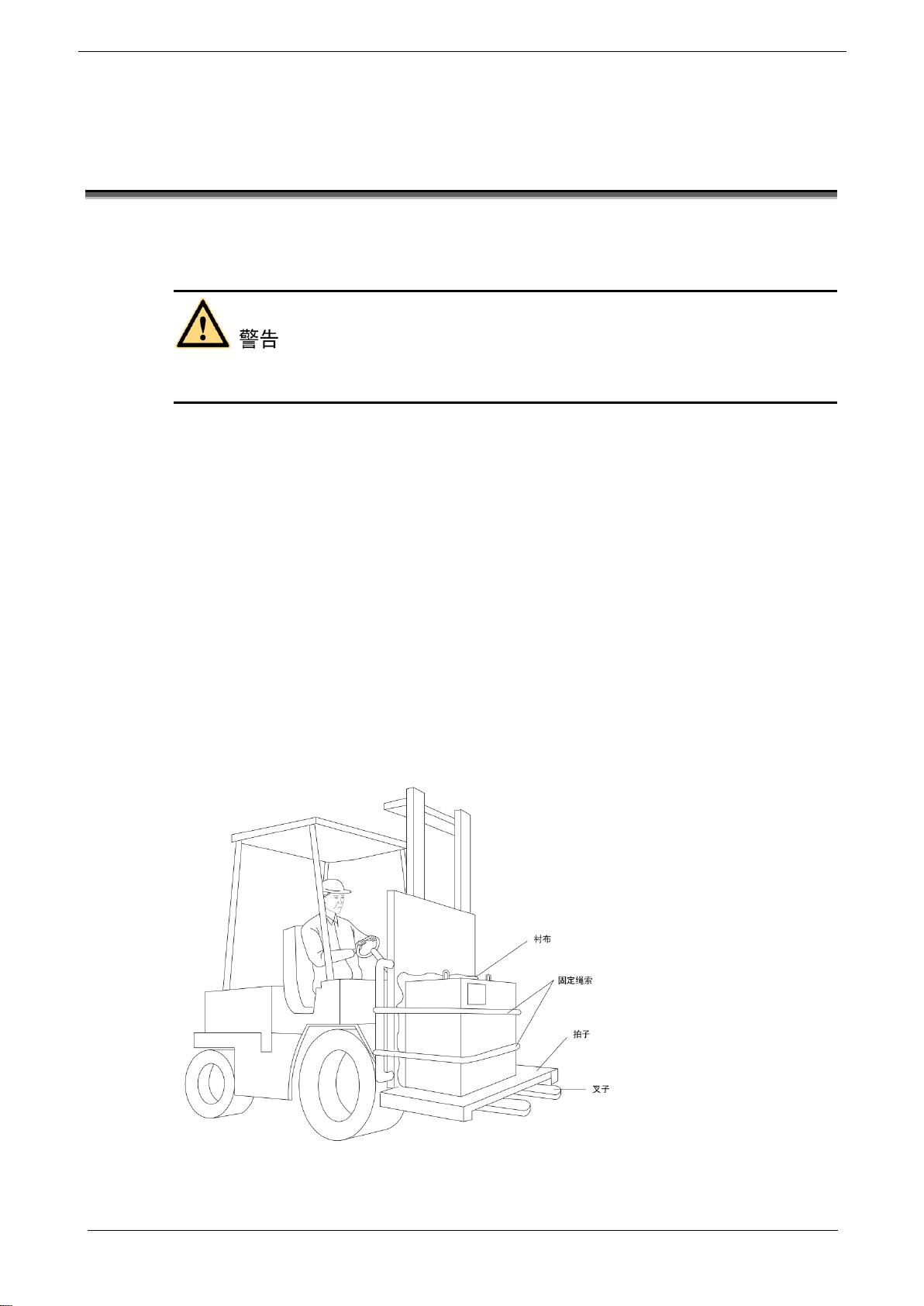
在最新的V1.5版中,手册对控制器运行程序更新进行了修改,使机器人的操作更加稳定可靠。另外,增加了通用设臵中吊装选择,适应更多的应用场景。回零指令、示教器升级和程序导入导出等方面也进行了修正和优化,提高了用户的使用体验。
综上所述,埃斯顿机器人操作手册是一本随着时间不断更新和改进的指南,详细介绍了埃斯顿机器人示教器的操作方法和各版本的功能改进。通过学习和使用该手册,用户能够熟练掌握埃斯顿机器人的操作技能,提高工作效率,满足不同应用场景的需求。同时,埃斯顿机器人操作手册的不断更新和升级也反映了该公司在不断推动技术进步,为用户提供更好的产品和服务。

ER 系列工业机器人操作手册
第 2 章产品确认
文档版本 V1.5(适用于 RCS2 V1.16)
版权所有 @埃斯顿自动化 2018
2-1
第 2 章 产品确认
2.1 装箱内容确认
产品到达后,请清点其发货清单,标准的发货清单中包括下列 5 项内容:( 有关选项货物内容的信息将单独
提供)。
机器人
电控柜
示教编程器
供电电缆(机器人与电控柜间的电缆)
全套说明书
图2-1 装箱清单示意图
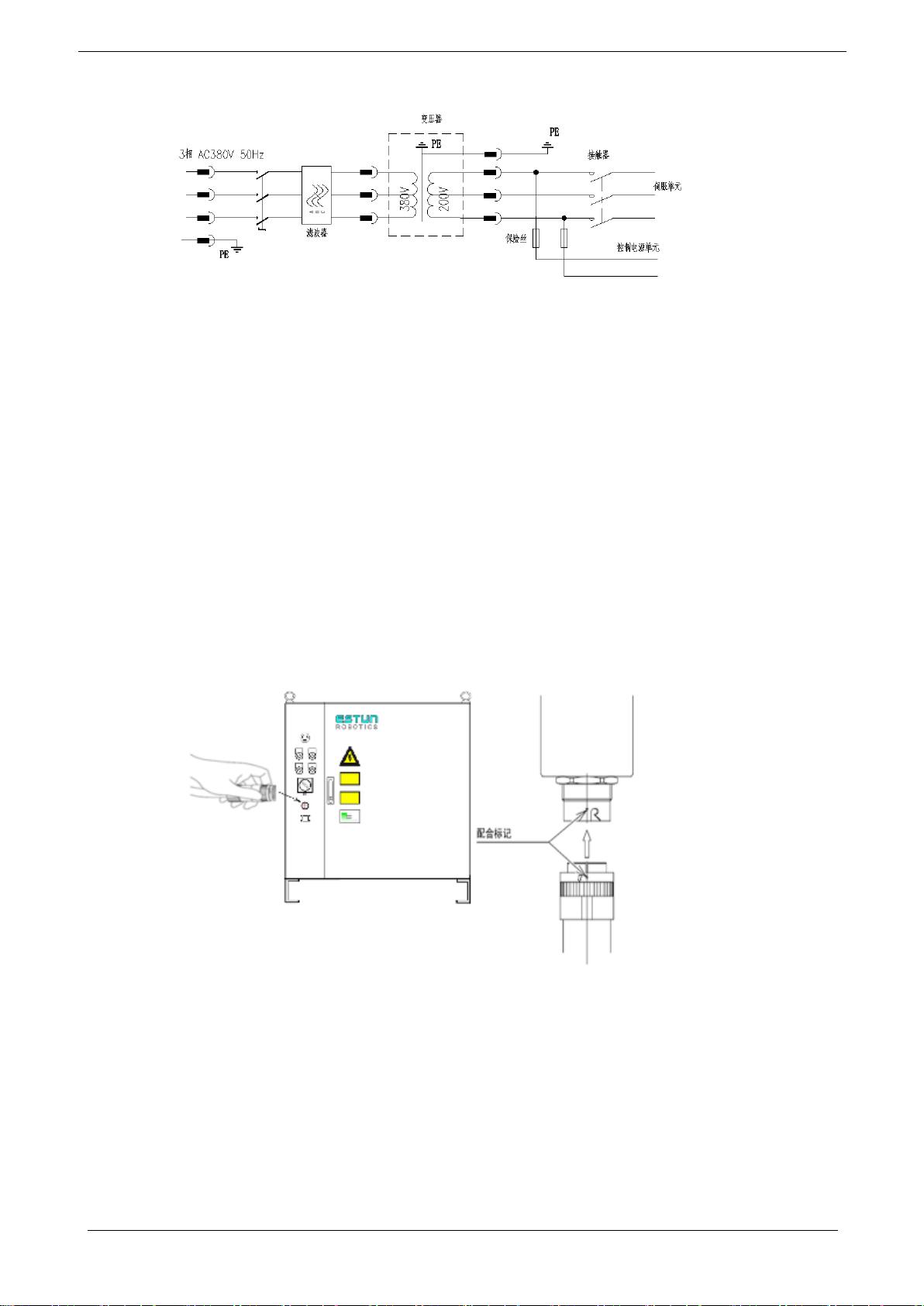
2.2 订货号确认
确认机器人与电控柜上的订货号是否一致。

剩余177页未读,继续阅读
2020-09-06 上传
2022-12-16 上传
点击了解资源详情
2018-02-07 上传
2023-09-08 上传
2020-05-09 上传
2021-06-24 上传

weixin_45796255
- 粉丝: 2
- 资源: 23
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
