卡尔曼滤波器在汽车导航中的应用与原理
"嵌入式控制系统使用卡尔曼滤波器对过程变量进行观测,以实现精确的进程控制。本文深入探讨了卡尔曼滤波器的设计与实现基础,并通过汽车导航问题阐述了如何在汽车位置控制中利用该滤波器对当前位置进行可靠估计。"
卡尔曼滤波器是一种统计滤波方法,最早应用于飞行器导航,如今广泛应用在各种领域,包括嵌入式系统。它的主要任务是对那些无法直接精确观测或者受到噪声干扰的系统状态进行预测。在许多工程系统和嵌入式系统中,良好的滤波算法至关重要,能够从噪声中提取有用信息,比如在无线通信信号处理中,滤波器可以去除电磁噪声,保留信号的本质内容。在电源电压稳定方面,卡爾曼滤波器也能用于消除不必要的波动,保护电子设备的寿命。
理论上,卡尔曼滤波器适用于线性系统的状态估计。其独特之处在于,它是所有最优滤波器中误差最小的一种。在嵌入式控制系统中,对进程变量的精确估计是实现有效控制的前提。因此,卡尔曼滤波器成为了必不可少的工具。
文章首先介绍了卡尔曼滤波器的基本算法,并通过汽车导航系统举例。在汽车位置控制中,准确的车辆位置估计是关键。卡尔曼滤波器能够结合传感器数据和车辆动态模型,对车辆的位置和速度等状态进行连续的、有噪声抑制的估计。
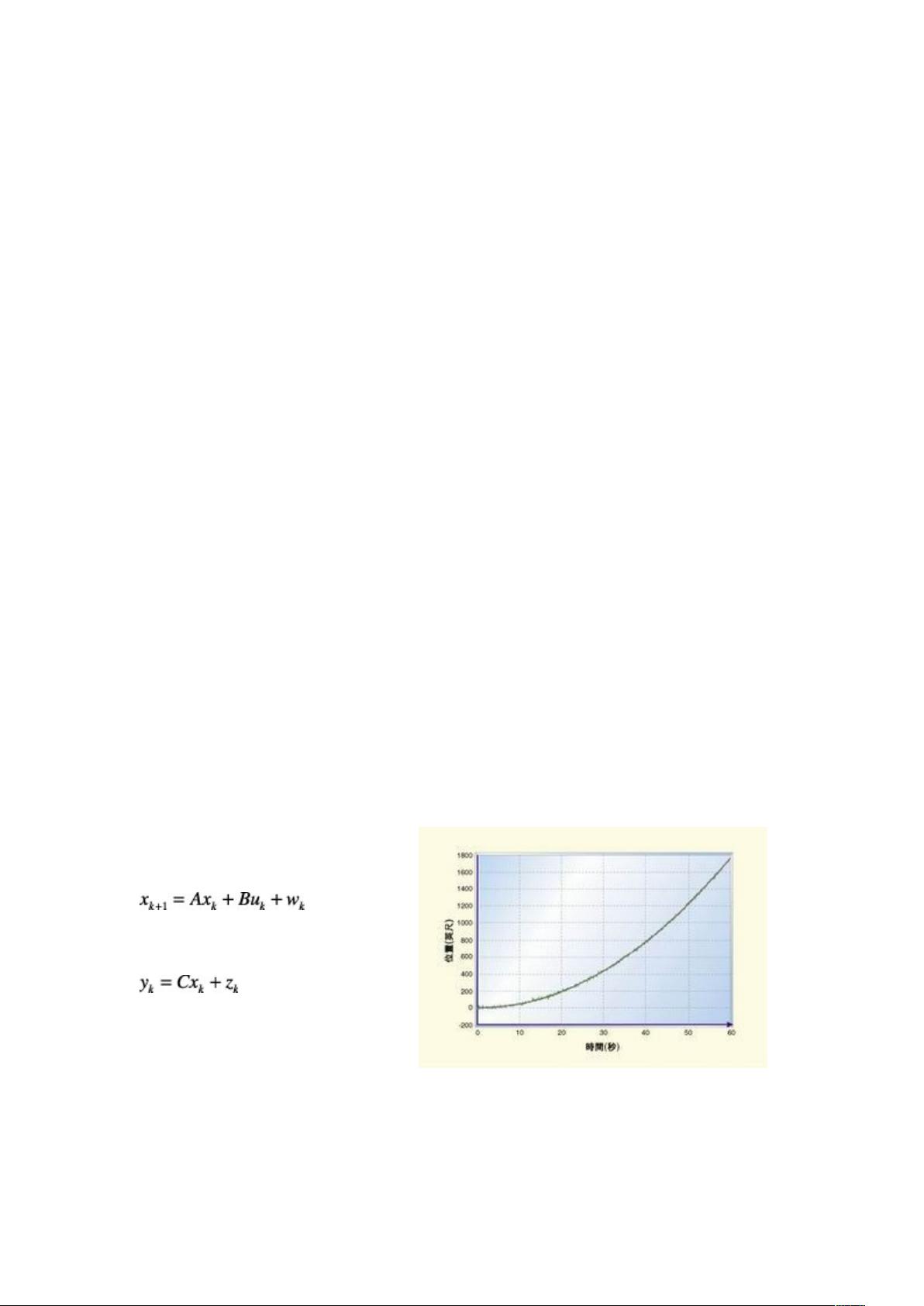
线性系统是卡尔曼滤波器应用的基础,许多物理过程,如车辆行驶、卫星轨道、电机轴运动和射频信号等,都可以用线性系统模型近似描述。线性系统由状态方程和输出方程构成:
状态方程: x[k+1] = Ax[k] + Bu[k] + w[k]
输出方程: y[k] = Cx[k] + z[k]
其中,A、B和C为矩阵,k表示时间步长,x是系统状态,u是已知输入,y是测量输出,w和z分别是过程噪声和测量噪声,它们都是向量,包含了多个可能的噪声源。
系统状态x包含了所有关于系统当前状态的信息,但由于不能直接测量,我们需要通过测量输出y来估计x。然而,由于y受到噪声z的影响,我们不能完全依赖y的测量值来估计x。卡尔曼滤波器通过一系列数学公式和预测更新步骤,能够从噪声中解耦出真实状态,提供更精确的估计。
例如,在汽车模型中,状态x可能包括汽车的位置p和速度v,输入u是控制的加速度,输出y是测量的位置。通过连续应用卡尔曼滤波器,系统可以不断修正和优化位置估计,即便在测量存在误差或噪声的情况下,也能提供相对准确的汽车位置信息。
嵌入式控制系統要用卡爾曼濾波器來觀測進程中的變量,以便實現進程控制。
本文將介紹卡爾曼濾波器設計和實現的基本原理,然後以汽車導航問題為實例,
說明汽車位置控制過程中,如何利用卡爾曼濾波器這個有效工具對汽車的當前
位置進行可靠的估計。
卡爾曼濾波器最初是專為飛行器導航而研發的,目前已成功應用在許多領域中。
卡爾曼濾波器主要用來預估那些只能被系統本身間接或不精確觀測的系統狀態。
許多工程系統和嵌入式系統都需要濾波。例如收到受噪音干擾的無線通訊信號
時,良好的濾波算法在保留有用資訊的同時,還可以從電磁信號中消除噪音。
又如在電源電壓中,未受干擾的電源是那些為了消除不期望波動而進行線電壓
過濾的電源設備,如果不消除這些波動,將會縮短電子設備(如電腦和列印機)
的壽命。
卡爾曼濾波器適用於觀測進程中的變量,從數學角度看,卡爾曼濾波器可估計
線性系統的狀態。卡爾曼濾波器不僅能在實踐中發揮很好的作用,而且在理論
上也頗引人注目,因為在各種濾波器中,卡爾曼濾波器的估計誤差最小。嵌入
式控制系統經常需要使用卡爾曼濾波器,因為要控制一個進程,首先必須精確
地估計進程中的變量。
本文將介紹卡爾曼濾波器設計和實現的基本原理。文章首先引入卡爾曼濾波器
算法並用該算法解決汽車導航問題。為了控制汽車的位置,首先必須對汽車的
當前位置進行可靠的估計。卡爾曼濾波器正是具備這項功能的有效工具。
線性系統
為了用卡爾曼濾波器消除信號中的噪音,被測量的進程必須能用線性系統描述。
許多物理進程,如路上行駛的車輛、圍繞地球軌道運轉的衛星、由繞組電流驅
動的電機軸或正弦射頻載波信號,均可用線性系統來近似。線性系統是指能用
如下兩個方程描述的簡單進程:
狀態方程:
輸出方程:
在上述方程中,A、B 和 C 均為矩陣,k 是時間系數,x 稱為系統狀態,u 是系
統的已知輸入,y 是所測量的輸出。w 和 z 表示噪音,其中變量 w 稱為進程噪
音,z 稱為測量噪音,它們都是向量,因此包含多個元素。x 中包含系統當前狀
下载后可阅读完整内容,剩余6页未读,立即下载
点击了解资源详情
点击了解资源详情
152 浏览量
333 浏览量
2021-09-14 上传
点击了解资源详情
102 浏览量
309 浏览量
683 浏览量

簡灬讠己
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







