RB-4机器人调试与组装指南
需积分: 1 36 浏览量
更新于2024-07-30
收藏 994KB PDF 举报
"RB-4 汉库机器人组装说明"
RB-4 汉库机器人是一款先进的可组装机器人,适用于教育、娱乐以及初级研发领域。本说明书提供了详细的调试指南,帮助用户了解并掌握RB-4机器人的组装和编程。
1. 系统概述
- 舵机与机器人:舵机是构成RB-4机器人运动系统的关键部件,负责执行精确的角度转动,以实现机器人的各种动作。
- 舵机的基本认识:舵机通常包含一个马达、齿轮传动系统和位置传感器,能够根据接收到的脉冲宽度调制(PWM)信号调整其转角。
- 舵机PWM信号介绍:PWM信号定义了舵机旋转的角度和速度,其周期固定,但占空比可变,从而控制舵机的运动状态。
2. 控制系统硬件定义
- STC控制板简介:STC控制板是RB-4机器人的大脑,采用STC系列单片机,处理机器人的指令和数据。
- 机器人机体简介:机体由多个模块化部件组成,包括舵机、骨架、传感器等,便于组装和维护。
- 连接关系说明:舵机通过特定的接口与STC控制板连接,接收控制信号,并将机械动作反馈回控制系统。
3. 开发软件介绍
- KEILC12:这是一种C语言编译器,用于编写和编译控制板上的程序代码。
- STC_ISP_V3.5:这是STC单片机的编程软件,允许用户通过ISP(In-System Programming)方式烧录代码到控制板上。
4. 语言程序架构解析
- C语言嵌入汇编:为了优化性能,开发者可以在C代码中嵌入汇编语言,直接控制硬件资源。
- 汇编语言被嵌入的说明:汇编语言可以提供更底层的控制,但使用时需遵循特定规则和语法。
- KEILC下的具体操作步骤:包括创建新项目、选择芯片类型、添加源文件和设置项目属性等步骤。
5. 遇到的问题及解决方法
- A&Q:文档中可能包含了常见问题解答,帮助用户解决在组装和调试过程中遇到的问题。
RB-4机器人的调试过程涉及硬件连接、软件配置、程序编写等多个环节。用户需要对舵机的工作原理、单片机编程以及C语言有一定了解。通过详细阅读和实践本说明书,用户可以逐步掌握RB-4机器人的调试和控制,从而实现其定制化的功能。在遇到困难时,参照问题解答部分或联系技术支持,如010-82782762,获取必要的帮助。
RB-4 机器人调试说明书
____________________________________________________________________________________________________
Tel:010-82782762 Fax:010-62965267 http://www.hangood.com 第 5 页/共 23 页
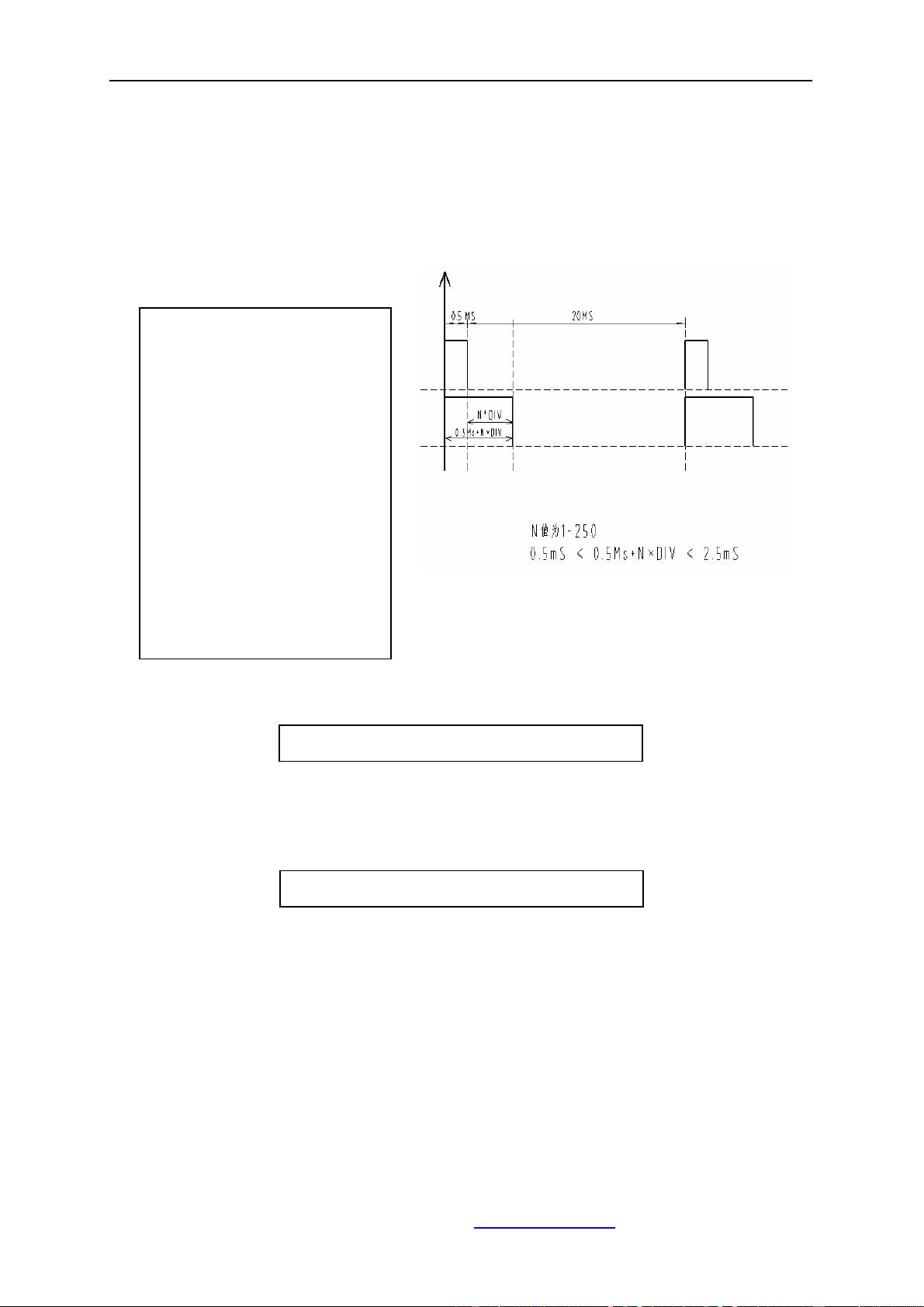
1.3.2 PWM 信号控制精度制定
上面已经提到了八位单片机,我们的舵机需要的是方波信号。单 片机的精度直接影
响了舵机的控制精度,这里就详细的说明一下。
我们在这里做了一些名词上的定义。DIV 是一个时间位置单位,一个 DIV 等于 8us,
关系入公式:
时基寄存器内的数值为:( #01H)01 ———(#0FAH)250。
共 185 度,分为 250 个位置,每个位置叫 1DIV。则:
PWM 上升沿函数: 0.5mS + N×DIV
0uS ≤ N×DIV ≤ 2mS
0.5mS ≤ 0.5Ms+N×DIV ≤ 2.5mS
根据这些知识。我们就可以开始编程,并做一些初步的实验,学会舵机控制是研究机器
人的一个比较技术手段,需要完全掌握。
185÷250 = 0.74 度 / DIV
1 DIV = 8uS 250DIV=2mS
图 1-4
我们采用的是 8 位
STC12C5410ADCPU,其数据分
辨率为 256,那么经过舵机极限
参数实验,得到应该将其划分为
250 份。
那么 0.5mS---2.5Ms 的宽度
为 2mS = 2000uS。
2000uS÷250=8uS
则:PWM 的控制精度为 8us
我们可以以 8uS 为单位递增
控制舵机转动与定位。
舵机可以转动 185 度,那么
185 度÷250=0.74 度,
则:舵机的控制精度为 0.74 度
剩余22页未读,继续阅读
110 浏览量
114 浏览量
110 浏览量
点击了解资源详情
161 浏览量
374 浏览量
374 浏览量
123 浏览量
2020-08-10 上传









