
大连交通大学 2012 届本科生毕业设计(论文)
6
0
( )
20lg 20lg ( )
( )
p
p
j
j
p
j
H e
H e
H e
w
w
a
= =-
dB (2-6)
0
( )
20lg 20lg ( )
( )
s
s
j
j
s
j
H e
H e
H e
w
w
a
= =-
dB (2-7)
式中均假定
0
( )
j
H e
已被归一化为 1。
2.5数字滤波器的基本结构
作为线性时不变系统的数字滤波器可以用系统函数来表示,而实现一个系统函数表
达式所表示的系统可以用两种方法:一种方法是采用计算机软件实现;另一种方法是用
加法器,乘法器和延迟器等元件设计出专用的数字硬件系统,即硬件实现。不论软件实
现好事硬件实现,在滤波器设计过程中,由同一系统函数可以过程很多不同的运算结构。
对于无限精度的系数和变量,不同结构可能是等效的,与其输入和输出特性无关;但是
在系数和变量精度是有限的情况下,不同运算结构的性能就又很大的差异。因此,有必
要对离散时间系统的结构有一基本认识。
2.5.1 FIR滤波器的基本结构
FIR滤波器的基本结构有以下几种:直接型、级联型、线性相位型、频率采样型。
1.直接型:
设 FIR 滤波器的单位冲击响应 h(n)为一个长度为 N 的序列,则滤波器系统函数为:
1
0
( ) ( )
N
n
n
H z h n z
-
-
=
=
å
(2-8)
表示这一系统输入输出关系的差分方程为
1
0
( ) ( ) ( )
N
m
y n h m x n m
-
=
= -
å
(2-9)
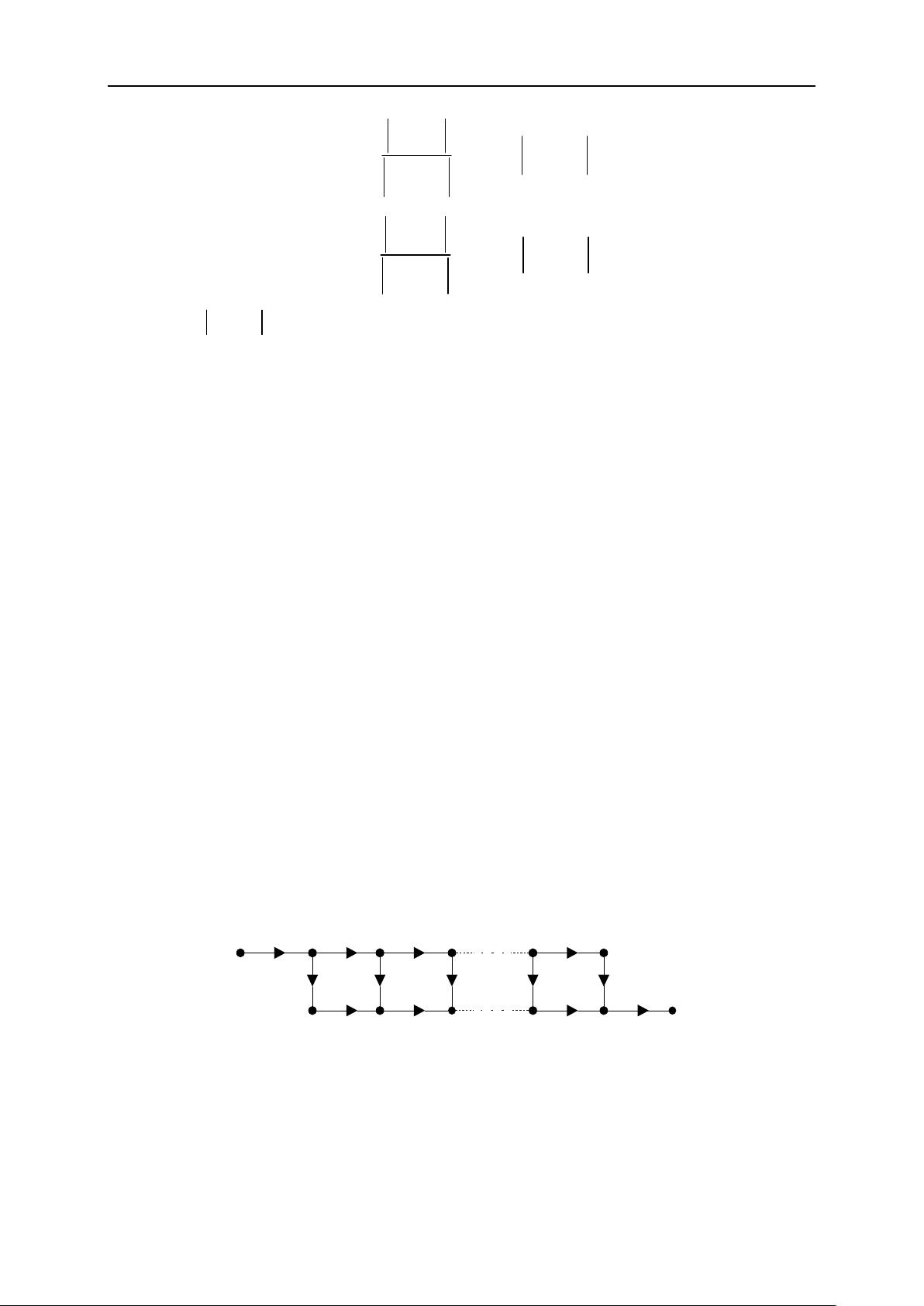
直接由差分方程可得出对应的网络结构如图 2-1 所示:
x(n)
h(0) h(1) h(2) h(N-2) h(N-1)
y(n)
1
z
�
1
z
�
1
z
�
图 2-1 FIR 滤波器的直接型结构
直接型结构的优点:简单直观,乘法运算量较少。
缺点:调整零点较难。
2.级联型
剩余28页未读,继续阅读















