空间二连杆机器人动力学建模与ADAMS仿真分析
"该文主要探讨了空间二连杆机器人的动力学建模及动态过程仿真,使用了ADAMS软件进行仿真实验。文中详细介绍了ADAMS的三个主要模块:用户界面模块、求解器模块和后处理模块,并具体阐述了在ADAMS中构建和分析空间二连杆机器人的步骤,包括运动学分析和动力学分析。文章还讨论了机器人的运动学正问题和逆问题,以及解决逆问题的各种方法。"
在机器人技术领域,空间二连杆机器人是一种常见的多关节机构,广泛应用于工业自动化和科研实验。动力学建模是理解和控制这种机器人行为的关键,它涉及到机器人运动时的质量、力矩、惯性等因素。通过动力学建模,我们可以预测机器人的动态响应,这对于优化控制策略、减少能耗和提高工作效率至关重要。
在本文中,作者首先介绍了机器人机械臂的运动学与动力学分析方法。运动学研究机器人的位置和姿态如何随时间变化,而动力学则关注引起这些变化的力和力矩。对于空间二连杆机器人,运动学分析通常分为正问题和逆问题。正问题是从关节变量推导出末端执行器的位姿,而逆问题则是反过来,从期望的位姿确定关节变量。
ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一个强大的多体动力学仿真软件,用于模拟机械系统的运动。在ADAMS中,作者创建了一个用长方形连杆表示的空间二连杆机器人模型,分别进行了运动学和动力学分析。运动学分析通过计算连杆的坐标变换矩阵来确定末端执行器的位置和姿态;动力学分析则涉及计算作用在各个连杆上的力和力矩,以及由此产生的加速度。
ADAMS包含三个主要模块:用户界面(ADAMS/View)用于构建和编辑机械系统模型,求解器(ADAMS/Solver)负责计算系统的动力学行为,而后处理模块(ADAMS/PostProcessor)则用于可视化和分析仿真结果。
在解决机器人运动学逆问题时,文章提到了几种方法,如逆变换法、旋量代数法、数值迭代法和几何法。这些方法各有优缺点,例如逆变换法直观但可能有多个解,旋量代数法则提供了一种简洁的数学表示,而数值迭代法适用于非线性问题但可能需要多次迭代才能收敛。
这篇文章除了介绍空间二连杆机器人的动力学建模外,还提供了实际操作的ADAMS仿真步骤,这对于理解和应用这类机器人的动态行为具有很高的实用价值。同时,对运动学逆问题的讨论也展示了机器人控制理论的核心挑战和解决方案。

1.3 后处理模块(ADAMS/PostProcessor)
MDI 公司开发的后处理模块 ADAMS/Postprocessor,用来处理仿真结果数据,显示仿真
动画等。既可以在 ADAMS/View 环境中运行,也可脱离该环境独立运行。
ADAMS/PostProcessor 的主要功能是为观察模型的运动提供了所需的环境,用户可以向
前,向后播放动画,随时中断播放动画,而且可以选择最佳观察视角,从而使用户更容易地
完成模型排错任务;为了验证 ADAMS 仿真分析结果数据的有效性,可以输入测试数据,
并测试数据与仿真结果数据进行绘图比较,还可对数据结果进行数学运算,对输出进行统计
分析;用户可以对多个模拟结果进行图解比较,选择合理的设计方案;可以帮助用户再现
ADAMS 中的仿真分析结果数据,以提高设计报告的质量;可以改变图表的形式,也可以添
加标题和注释;可以载入实体动画,从而加强仿真分析结果数据的表达效果;还可以实现在
播放三维动画的同时,显示曲线的数据位置,从而可以观察运动与参数变化的对应关系。
二.空间二连杆机器人 adams 建模仿真
2.1 空间二连杆串联机器人
在ADAMS中用长方形连杆模拟机械臂,对两自由度的机械臂分别进行运动学
分析动力学分析。
2.1.1 运动学分析
下面是建立模型并对模型进行
设置分析的详细过程。
(1)启动 ADAMS/View,在欢迎对
话框中选择新建模型,模型取名为
Robot_arm,并将单位设置为 MMKS,
然后单击 OK。
(2)打开坐标系窗口。按下
2.1 创建连杆设置 2.2 孔设置
F4 键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗口。
当鼠标在图形区移动时,在坐标窗口中显示了当前鼠标所在位置的坐
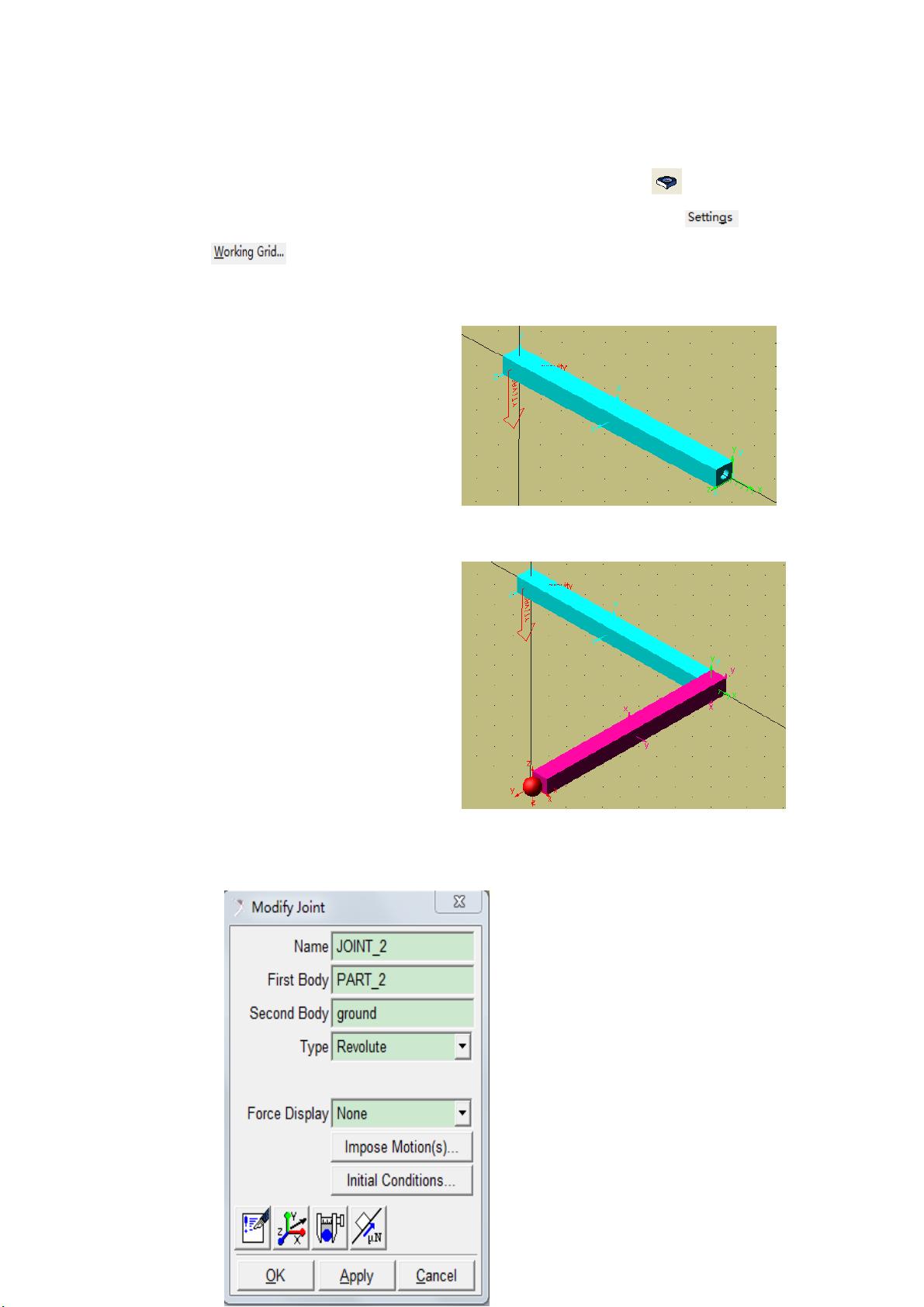
(3)创建机械臂关节 1(连杆)。单击方形杆按钮 ,勾选连杆的长、宽、深
选项,分别将其设置为 50.0cm、4.0cm、4.0cm,如图 2.1 所示。在图形区单击鼠
标左键,然后将连杆拖至水平位置时,在单击鼠标左键。
剩余31页未读,继续阅读
2015 浏览量
4010 浏览量
316 浏览量
2024-10-08 上传
2024-10-08 上传
240 浏览量
327 浏览量
364 浏览量









