STC89C52单片机驱动的智能红外循迹避障小车设计
版权申诉
149 浏览量
更新于2024-06-17
收藏 2.71MB DOC 举报
随着科技的进步和人们对智能化生活需求的增长,基于单片机的红外智能循迹避障小车设计成为了一种极具创新性和实用性的项目。本文档的核心是围绕STC89C52单片机进行设计,这是一种广泛应用在嵌入式系统中的微控制器,因其高效、低功耗的特性,被选作小车的控制核心。
首先,设计的核心理念是实现汽车般的自主驾驶和避障功能。STC89C52单片机负责接收并处理来自红外对管和超声波传感器的数据。红外对管作为追踪模块,通过发射和接收红外光束,能够检测到黑线(如预设的路径),从而引导小车沿着轨迹行驶。这种技术利用了光敏元件的特性,实现了对环境的智能感知和响应。
超声波传感器则扮演着避障的角色,通过发送声波并测量回波,小车能够计算与障碍物的距离,当感知到前方有物体时,程序会控制电机做出相应的调整,避免碰撞,体现了小车的智能避障能力。
L298N芯片作为一个双向驱动器,负责控制电机的正反转,通过精心编写的程序,确保了小车的精确运动控制。这种硬件和软件的协同工作,使得小车能够精确地执行循迹和避障任务。
设计过程中,作者采用模块化设计方法,将系统分解成多个独立的子系统,如控制模块、传感器模块和驱动模块。这种方法不仅提高了设计效率,便于调试,而且有利于问题的定位和后期维护。每个模块都有明确的功能,比如控制模块负责决策,传感器模块负责收集数据,而驱动模块负责执行指令。这样的设计使得系统整体更为稳健,不易出现全局错误。
总结来说,这个基于单片机的红外智能循迹避障小车设计,结合了现代信息技术和机械工程原理,通过智能化的传感器和精准的控制系统,实现了小车的自主导航和障碍物规避,展示了单片机在智能设备中的强大应用潜力。同时,它也为我们提供了一个理解与实践智能控制、传感器融合和模块化设计的宝贵案例。
4
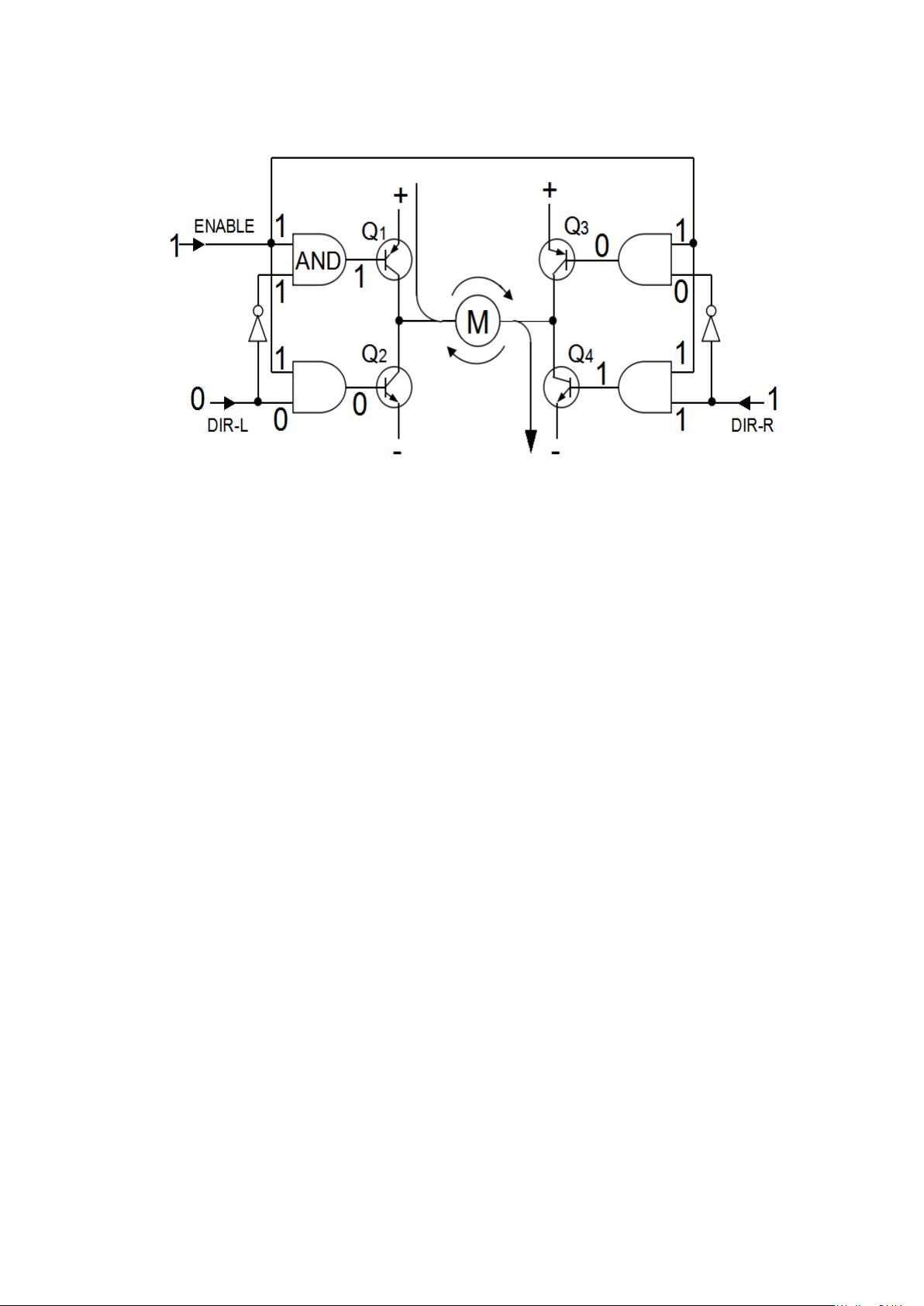
图 1 H 桥式驱动电路
2.3 PWM 调速技术
由于小车在进行自动循迹和避障时,两个驱动轮的速度并不是一样的,这个时候要
对小车各个轮子速度控制,就必须使用到一种调速技术,即为脉冲宽带调制技术
(PWM),简称为脉宽调制。PWM 调速主要是利用微处理器来控制,它可以使模拟电路中
的信号进行数字化输出,从而可以对电路进行有效的控制。而且,PWM 技术在使用单片机
等控制芯片的系统中,可以让控制方面变得更加简洁、高效。
PWM 技术的实现主要有两种方法,一种是硬件调制法,另外一种就是软件生成法。硬
件生成法(如图 2 所示)是把所希望得到的波形作为调制信号,我们可以根据需要的波
形来进行改变参数选择。被调制信号作为载波信号,通过对载波信号的幅频、相频等进
行调节,可以得到所需要的 PWM 信号波形。由于三角在实现时比较容易,而且其各种参
数的调制也方便,因此我们一般将其作为载波信号。由于各种复杂的信号都可以认为是
许多不同的正弦信号叠加而成,我们可以把正弦波作为调制信号,这样我们得到的信号
波形就是 PWM 信号。软件生成方法是利用计算机软件技术来实现产生 PWM 波的调制,这
种技术产生信号更加容易。而且在进行 PWM 波形变换时,只要在软件程序里进行简单的
修改,即可以进行实现。

剩余38页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-01 上传
2021-09-29 上传
2021-12-24 上传
2022-07-01 上传
2022-05-27 上传
2021-09-24 上传

cqtianxingkeji
- 粉丝: 3036
- 资源: 1631
 我的内容管理
展开
我的内容管理
展开







最新资源
- PureMVC AS3在Flash中的实践与演示:HelloFlash案例分析
- 掌握Makefile多目标编译与清理操作
- STM32-407芯片定时器控制与系统时钟管理
- 用Appwrite和React开发待办事项应用教程
- 利用深度强化学习开发股票交易代理策略
- 7小时快速入门HTML/CSS及JavaScript基础教程
- CentOS 7上通过Yum安装Percona Server 8.0.21教程
- C语言编程:锻炼计划设计与实现
- Python框架基准线创建与性能测试工具
- 6小时掌握JavaScript基础:深入解析与实例教程
- 专业技能工厂,培养数据科学家的摇篮
- 如何使用pg-dump创建PostgreSQL数据库备份
- 基于信任的移动人群感知招聘机制研究
- 掌握Hadoop:Linux下分布式数据平台的应用教程
- Vue购物中心开发与部署全流程指南
- 在Ubuntu环境下使用NDK-14编译libpng-1.6.40-android静态及动态库
