远近视距双目视觉系统标定新技术:点阵编码与多视图几何法
版权申诉
125 浏览量
更新于2024-06-27
收藏 2.43MB DOCX 举报
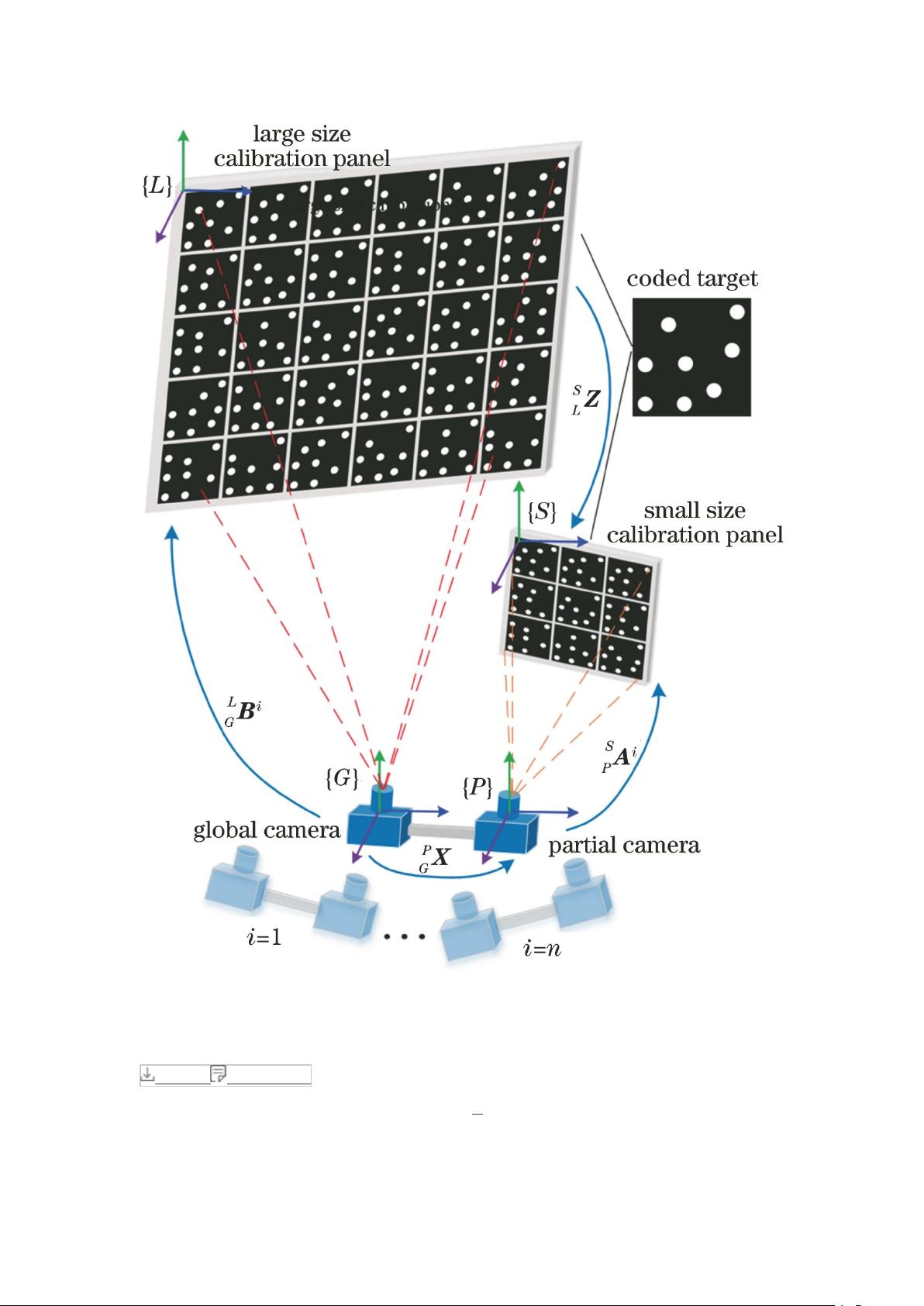
本文主要探讨了在工业机械臂多工位作业中,为了实现全局目标定位和局部精确测量所需的具有远近视距的两目视觉系统标定技术。传统的双目立体视觉由于两相机缺乏共同视场,无法直接进行内外参数的标定,这就提出了一个挑战。研究者针对这一问题,提出了创新的标定策略。
首先,他们设计并制作了两种尺寸的点阵编码元标定板,这些标定板的尺寸与远近视距两目系统的视场大小相匹配。在这个过程中,作者强调了亚像素边缘定位方法的应用,它基于灰度梯度的精细分析,显著提高了椭圆编码元中心的定位精度。此外,文章还改进了解码算法,增强了图像特征之间的稳健匹配能力,确保在复杂环境下的稳定识别。
接着,通过在不同视角下获取高精度的编码元中心像素坐标以及不同相机之间编码元的对应关系,研究人员利用多视图几何原理,有效地解算出了两目相机的内参数(如焦距、主点等)以及它们相对于各自标定板的转换矩阵。这些参数是构建相机坐标系与世界坐标系之间关系的关键。
进一步地,论文介绍了如何利用转换矩阵构建标准的AX=ZB形式的手眼标定方程,通过求解这个方程中的变量X,得到了两目相机之间的外参数,即相机之间的空间关系和姿态信息。外参数的精确确定对于后续的视觉导航和物体抓取等任务至关重要。
最后,文章详细分析了两种优化方法对标定误差的影响。优化后的标定技术显著提升了标定精度,实验结果显示,角度误差降低到了0.05°,而位置误差控制在了0.36mm以内,这在实际应用中意味着更高的准确性和可靠性。
本文的研究成果提供了一种有效的方法,解决了具有远近视距的两目视觉系统标定难题,对于提升工业机械臂的智能化水平和工作效率具有重要的实践价值。
剩余19页未读,继续阅读
2020-09-11 上传
2023-06-19 上传
2022-12-15 上传
2023-10-19 上传

罗伯特之技术屋
- 粉丝: 4459
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
