立体事件相机三维重建:优势与新方法
188 浏览量
更新于2024-06-20
收藏 1.89MB PDF 举报
"该文探讨了基于立体事件相机的三维重建技术,强调了事件相机的优势,如低延迟、高速度和高动态范围,并提出了一种适用于静态场景的解决方案。该方法利用小基线的时空一致性优化能量函数,同时采用概率深度融合策略提升重建质量和降低不确定性。实验证明,这种方法能有效处理纹理丰富和稀疏场景,优于基于事件数据图像表示的传统立体方法。文章还介绍了事件相机的工作原理,如何与标准相机不同,以及它们在高速和高动态范围场景中的应用潜力。"
事件相机,如动态视觉传感器(DVS),是新型的生物启发式传感器,它们不再按照固定帧率捕捉整个图像,而是在像素级别的亮度变化发生时产生事件。这种异步和差异性的工作模式使得事件相机在功耗、带宽需求上远低于传统相机,同时提供了微秒级的时间分辨率和高达140dB的动态范围。这些特性使其特别适合处理高速运动和宽光照条件下的视觉任务,避免了标准相机常见的运动模糊和动态范围限制。
针对事件相机数据的特殊性质,本文提出了一种立体事件相机的三维重建方法。在静态场景中,通过移动的立体事件相机钻机收集数据,利用小基线的时空一致性来优化能量函数。这种方法旨在最大化事件触发的两个立体图像平面的一致性,从而提高重建的准确性和细节。此外,为了进一步提高密度和减小估计不确定性,研究者开发了概率深度融合策略,即使在数据稀疏的情况下也能提升重建质量。
实验结果证明,所提出的方法不仅适用于纹理丰富的环境,也能够应对稀疏场景,且性能优于基于事件数据图像表示的传统立体重建技术。这一工作对于推动事件相机在计算机视觉领域的应用具有重要意义,尤其是在那些对速度和动态范围有高要求的场景,如自动驾驶、无人机导航和高速运动物体跟踪等领域。同时,这也为设计更适应事件相机特性的视觉算法开辟了新的道路。
4
Y. Zhou,G.加列戈河雷贝克湖Kneip,H.Li,D.斯卡拉穆扎
.
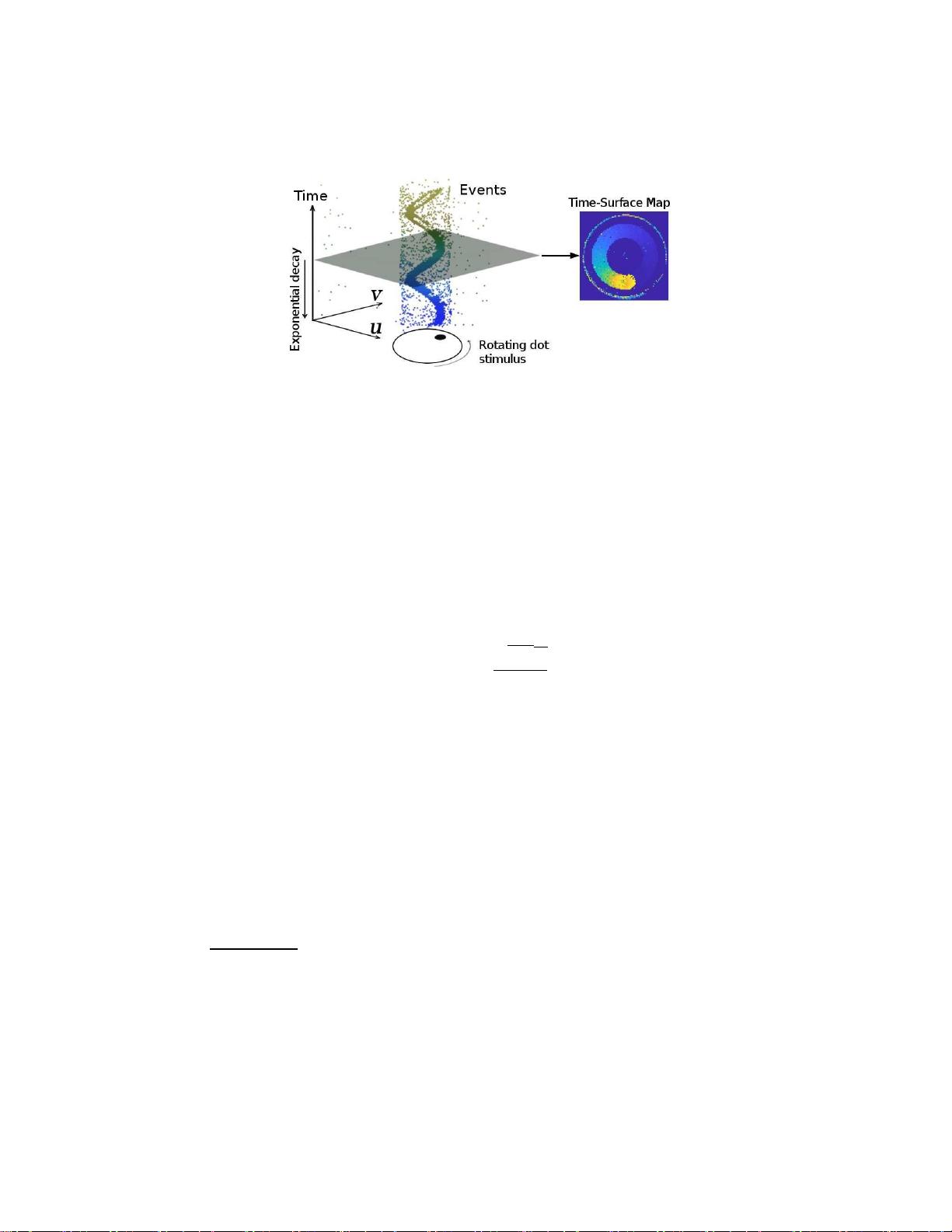
图1:左:观察旋转点时事件摄像机的输出右:时间-在时间t
的
表面图
(1),
T
(x
,
t
),其基本上测量在每个像素x =(
u
,
v
)
T
处
最后一个
事件在时间上(相对于
t
)尖峰有多远。颜色越亮,事件生成的时间
越近图改编自[33]。
2.1
事件时间-表面图
我们建议应用补丁匹配来比较一对尖峰历史图,代替DTAM [30]中使
用的光度扭曲误差。具体来说,为了创建两个独特的地图,我们提倡
使用受[32]启发的
时间表面
进行基于事件的模式识别。如示于图1,事
件相机的输出是事件流,其中每个事件
e
k
=
(
uk
,
v
k
,
t
k
,
p
k
)由发生
预定义大小的强度变化的时空坐标和变化6的符号(极性
p
k
∈
{
+1
,
-
1
}
)
组成
。通过在每个像素坐标x
=
(
u
,
v
)
T
处的
最后尖峰时间
t
last
上应用
指数衰减核来定义时间
t
处的时间-表面图:
.
T
(x
,
t
)= exp
.
Σ
−
t
−
t
last
(x)
δ
、
(1)
其中
,
衰减速率参数δ是小的常数(例如,30ms)。为了便于可视化
和处理,(1)被进一步重新缩放到范围[0
,
255]。我们的目标函数
是在不同观测时间
t
=
{
ts
}
的一组时间表面映射(1)上构造的。
2.2
问题公式化
我们遵循全局能量最小化框架来从附近的多个立体观测
s
∈
S
RV
估计参考
视图(RV)中的逆深度图D立体声音响。在时间
Σ
e
t
的观测
是指一对时间
表面图cre-
t
(
·
,
t
)
,
T
r
i
g
h
t
(
·
,
t
)
。
一个系统可以
通过以下
方式
进行
检索
姿态更新或以恒定速率。对于参考视图中的每个像素x
其逆深度
ρ
= 1
/z
通过优化目标函数来估计:
ρ
= arg min
C
(x
,
ρ
)(2)
ρ
6
未使用事件极性,因为[13]表明3D重建不需要事件极性
⋆
剩余16页未读,继续阅读
142 浏览量
2023-05-26 上传
2023-07-31 上传
2023-05-30 上传
2024-01-04 上传
2023-06-24 上传
2023-05-11 上传
2023-10-24 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
