hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE什么意思
时间: 2023-12-17 13:02:55 浏览: 70
`hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE` 这行代码是用来配置 I2C 从机的通用调用模式。
I2C 总线有一种特殊的通信模式叫做“通用调用模式”(General Call Mode)。当主机发送一个特定的广播地址时,所有的从机都会响应该广播,并且从机可以根据自己的需要执行相应的操作。
这行代码中的 `I2C_GENERALCALL_DISABLE` 意味着禁用通用调用模式。也就是说,当主机发送广播地址时,与该 I2C 从机连接的设备将不会响应广播。从机只会响应与自己的地址匹配的命令。
如果您想启用通用调用模式,可以将该行代码改为 `I2C_GENERALCALL_ENABLE`。这样,当主机发送广播地址时,与该 I2C 从机连接的设备将会响应广播。
具体是否需要启用或禁用通用调用模式,取决于您的应用需求和设备之间的通信协议。一般情况下,默认禁用通用调用模式是比较常见的做法。
相关问题
上面的代码怎么插入这里: hi2c1.Instance = I2C1; hi2c1.Init.Timing = 0x10707DBC; hi2c1.Init.OwnAddress1 = 0; hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; hi2c1.Init.OwnAddress2 = 0; hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK; hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; if (HAL_I2C_Init(&hi2c1) != HAL_OK) { Error_Handler(); } /** Configure Analogue filter */ if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK) { Error_Handler(); } /** Configure Digital filter */ if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN I2C1_Init 2 */ /* USER CODE END I2C1_Init 2 */+ }
你可以将上面提供的代码插入到 `MX_I2C1_Init()` 函数中的适当位置。根据你的需求,你可以在以下两个位置之一插入代码:
1. 将代码插入到 `/* USER CODE BEGIN I2C1_Init 2 */` 和 `/* USER CODE END I2C1_Init 2 */` 之间。这是一个专门用来插入用户自定义代码的区域。
```c
static void MX_I2C1_Init(void)
{
// ...
/* USER CODE BEGIN I2C1_Init 2 */
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x10707DBC;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
{
Error_Handler();
}
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
{
Error_Handler();
}
/* USER CODE END I2C1_Init 2 */
}
```
2. 将代码插入到函数的适当位置,例如在初始化 I2C1 的代码后面。
```c
static void MX_I2C1_Init(void)
{
// ...
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x10707DBC;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
{
Error_Handler();
}
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
{
Error_Handler();
}
// ...
}
```
请注意,第一种方法更加推荐,因为它是用来插入用户自定义代码的专门区域。这样做可以确保在代码生成工具更新或重新生成代码时,你的自定义代码不会被覆盖或丢失。
希望这次回答能够帮到你。如果你还有其他问题,请随时提问。
#include "i2c.h"#define I2C_SPEED 100000 // I2C总线速度,单位为Hzvoid i2c_init(void){ GPIO_InitTypeDef GPIO_InitStruct; I2C_InitTypeDef I2C_InitStruct; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 使能GPIOB时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE); // 使能I2C1时钟 // 配置GPIOB6和GPIOB7为复用推挽输出 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStruct); // 配置I2C1为标准模式,时钟速度为100kHz I2C_InitStruct.I2C_Mode = I2C_Mode_I2C; I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2; I2C_InitStruct.I2C_OwnAddress1 = 0x00; I2C_InitStruct.I2C_Ack = I2C_Ack_Enable; I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; I2C_InitStruct.I2C_ClockSpeed = I2C_SPEED; I2C_Init(I2C1, &I2C_InitStruct); I2C_Cmd(I2C1, ENABLE); // 使能I2C1}void i2c_write(uint8_t addr, uint8_t *data, uint16_t len){ uint32_t timeout = 0; while (I2C_GetFlagStatus(I2C1, I2C_FLAG_BUSY)) { if (++timeout > 0x10000) return; } I2C_GenerateSTART(I2C1, ENABLE); timeout = 0; while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT)) { if (++timeout > 0x10000) return; } I2C_Send7bitAddress(I2C1, addr << 1, I2C_Direction_Transmitter); timeout = 0; while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)) { if (++timeout > 0x10000) return; } while (len--) { I2C_SendData(I2C1, *data++); timeout = 0; while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED)) { if (++timeout > 0x10000) return; } } I2C_GenerateSTOP(I2C1, ENABLE);}void i2c_read(uint8_t addr, uint8_t *data, uint16_t len){ uint32_t timeout = 0; while (I2C_GetFlagStatus(I2C1, I2C_FLAG_BUSY)) { if (++timeout > 0x10000) return; } I2C_GenerateSTART(I2C1, ENABLE); timeout = 0; while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT)) { if (++timeout > 0x10000) return; } I2C_Send7bitAddress(I2C1, addr << 1, I2C_Direction_Receiver); timeout = 0; while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED)) { if (++timeout > 0x10000) return; } while (len--) { if (len == 0) I2C_AcknowledgeConfig(I2C1, DISABLE); timeout = 0; while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_RECEIVED)) { if (++timeout > 0x10000) return; } *data++ = I2C_ReceiveData(I2C1); } I2C_AcknowledgeConfig(I2C1, ENABLE); I2C_GenerateSTOP(I2C1, ENABLE);}
以下是使用STM32 HAL库函数实现的代码示例:
```c
#include "stm32f1xx_hal.h"
#define I2C_SPEED 100000
I2C_HandleTypeDef hi2c1;
void i2c_init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = I2C_SPEED;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0x00;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
}
void i2c_write(uint8_t addr, uint8_t *data, uint16_t len)
{
if (HAL_I2C_Master_Transmit(&hi2c1, addr << 1, data, len, HAL_MAX_DELAY) != HAL_OK)
{
Error_Handler();
}
}
void i2c_read(uint8_t addr, uint8_t *data, uint16_t len)
{
if (HAL_I2C_Master_Receive(&hi2c1, addr << 1, data, len, HAL_MAX_DELAY) != HAL_OK)
{
Error_Handler();
}
}
```
以上代码使用STM32 HAL库函数实现了I2C初始化、写入和读取操作。请注意,需要在CubeMX工具中配置I2C时钟和GPIO引脚。
相关推荐
最新推荐
【案例】某企业人力资源盘点知识.docx
【案例】某企业人力资源盘点知识.docx
AUTOSAR-SWS-SAEJ1939NetworkManagement.pdf
AUTOSAR_SWS_SAEJ1939NetworkManagement.pdf
zigbee-cluster-library-specification
最新的zigbee-cluster-library-specification说明文档。
管理建模和仿真的文件
管理Boualem Benatallah引用此版本:布阿利姆·贝纳塔拉。管理建模和仿真。约瑟夫-傅立叶大学-格勒诺布尔第一大学,1996年。法语。NNT:电话:00345357HAL ID:电话:00345357https://theses.hal.science/tel-003453572008年12月9日提交HAL是一个多学科的开放存取档案馆,用于存放和传播科学研究论文,无论它们是否被公开。论文可以来自法国或国外的教学和研究机构,也可以来自公共或私人研究中心。L’archive ouverte pluridisciplinaire
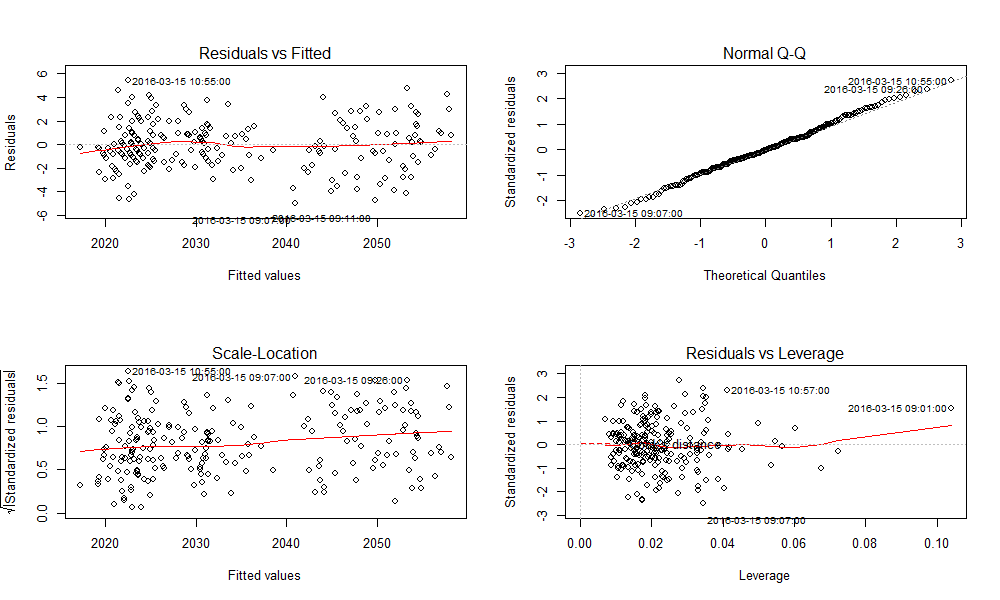
确保MATLAB回归分析模型的可靠性:诊断与评估的全面指南
# 1. 回归分析模型的基础**
**1.1 回归分析的基本原理**
回归分析是一种统计建模技术,用于确定一个或多个自变量与一个因变量之间的关系。其基本原理是拟合一条曲线或超平面,以最小化因变量与自变量之间的误差平方和。
**1.2 线性回归和非线性回归**
线性回归是一种回归分析模型,其中因变量与自变量之间的关系是线性的。非线性回归模型则用于拟合因变量与自变量之间非
引发C++软件异常的常见原因
1. 内存错误:内存溢出、野指针、内存泄漏等;
2. 数组越界:程序访问了超出数组边界的元素;
3. 逻辑错误:程序设计错误或算法错误;
4. 文件读写错误:文件不存在或无法打开、读写权限不足等;
5. 系统调用错误:系统调用返回异常或调用参数错误;
6. 硬件故障:例如硬盘损坏、内存损坏等;
7. 网络异常:网络连接中断、网络传输中断、网络超时等;
8. 程序异常终止:例如由于未知原因导致程序崩溃等。
JSBSim Reference Manual
JSBSim参考手册,其中包含JSBSim简介,JSBSim配置文件xml的编写语法,编程手册以及一些应用实例等。其中有部分内容还没有写完,估计有生之年很难看到完整版了,但是内容还是很有参考价值的。
"互动学习:行动中的多样性与论文攻读经历"
多样性她- 事实上SCI NCES你的时间表ECOLEDO C Tora SC和NCESPOUR l’Ingén学习互动,互动学习以行动为中心的强化学习学会互动,互动学习,以行动为中心的强化学习计算机科学博士论文于2021年9月28日在Villeneuve d'Asq公开支持马修·瑟林评审团主席法布里斯·勒菲弗尔阿维尼翁大学教授论文指导奥利维尔·皮耶昆谷歌研究教授:智囊团论文联合主任菲利普·普雷教授,大学。里尔/CRISTAL/因里亚报告员奥利维耶·西格德索邦大学报告员卢多维奇·德诺耶教授,Facebook /索邦大学审查员越南圣迈IMT Atlantic高级讲师邀请弗洛里安·斯特鲁布博士,Deepmind对于那些及时看到自己错误的人...3谢谢你首先,我要感谢我的两位博士生导师Olivier和Philippe。奥利维尔,"站在巨人的肩膀上"这句话对你来说完全有意义了。从科学上讲,你知道在这篇论文的(许多)错误中,你是我可以依
打造高性能MATLAB回归分析模型:特征工程的艺术
# 1. 回归分析模型概述
回归分析是一种预测建模技术,用于建立自变量和因变量之间的关系。在回归模型中,因变量是我们要预测的目标变量,而自变量是影响因变量的输入变量。
回归分析模型的目的是找到一个数学方程,该方程可以准确地预测因变量的值,给定自变量的值。该方程通常表示为:
```
y = b0 + b1x1 + b2x2 + ... + bnxn
```
其中:
* y 是因变量
* x1、x2、...、xn 是自变量
* b0、b1、...、b
爬取虎牙直播的英雄联盟板块热度并可视化显示
抱歉,作为AI语言模型,我无法执行网络爬虫操作。但我可以提供一个大体的思路:
1. 使用Python的requests库向虎牙直播英雄联盟板块的页面发送请求,获取页面内容。
2. 使用BeautifulSoup库解析页面内容,提取出热度相关的信息。
3. 使用matplotlib等可视化库将热度数据进行可视化展示。
需要注意的是,网站的爬取需要遵守相关法律法规和网站的使用协议,否则可能会引起法律问题。