open3d.cpu.pybind.geometry.PointCloud' object has no attribute 'point_size'
时间: 2023-12-14 22:03:34 浏览: 34
这个错误提示说明open3d.cpu.pybind.geometry.PointCloud对象没有point_size属性。这可能是因为您正在访问一个过时的属性名或版本,或者您的代码中有一些逻辑错误导致该属性未正确设置。您可以尝试查看文档或源代码,以确定正确的属性名称和使用方法,并检查您的代码是否正确设置了该属性。如果您无法解决问题,请提供更多上下文或代码以帮助我们更好地理解问题。
相关问题
open3d.cpu.pybind.geometry.PointCloud' object has no attribute 'copy'
如果你遇到了 `"open3d.cpu.pybind.geometry.PointCloud' object has no attribute 'copy'"` 错误,可能是因为你使用的是 Open3D 0.9.0 或更低版本,而在这些版本中,`PointCloud` 对象确实没有 `copy` 方法。
如果你想要进行深拷贝,可以使用 `deepcopy` 函数来实现:
```python
import copy
pcd_copy = copy.deepcopy(pcd)
```
这样,`pcd_copy` 就是 `pcd` 的深拷贝了。需要注意的是,深拷贝会创建一个新的对象,因此对 `pcd_copy` 的修改不会影响到 `pcd`。
AttributeError: 'open3d.open3d_pybind.geometry.PointCloud' object has no attribute 'triangulate
很抱歉,我之前的回答有误。Open3D的PointCloud对象确实没有`triangulate`方法。为了将点云三角化,可以使用以下代码:
```python
import rospy
import moveit_msgs.msg as moveit_msgs
import open3d as o3d
import numpy as np
def point_cloud_to_scene(point_cloud_topic, camera_frame_id, scene_publisher):
# Subscribe to point cloud topic
point_cloud = rospy.wait_for_message(point_cloud_topic, sensor_msgs.msg.PointCloud2)
# Convert point cloud to numpy array
points = np.array(list(pc2.read_points(point_cloud, skip_nans=True)))
# Convert numpy array to Open3D point cloud
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points)
# Triangulate point cloud
tri = o3d.geometry.TriangleMesh.create_from_point_cloud_alpha_shape(pcd, alpha=0.03)
# Convert Open3D triangle mesh to MoveIt scene
vertices = np.asarray(tri.vertices)
triangles = np.asarray(tri.triangles)
scene_msg = moveit_msgs.PlanningScene()
scene_msg.is_diff = True
object_msg = moveit_msgs.PlanningSceneWorld()
object_msg.collision_objects.append(moveit_msgs.CollisionObject())
object_msg.collision_objects[0].id = "point_cloud"
object_msg.collision_objects[0].header.frame_id = camera_frame_id
object_msg.collision_objects[0].meshes.append(moveit_msgs.Mesh())
object_msg.collision_objects[0].meshes[0].vertices = [moveit_msgs.Vertex(x=vertices[i][0], y=vertices[i][1], z=vertices[i][2]) for i in range(vertices.shape[0])]
object_msg.collision_objects[0].meshes[0].triangles = [moveit_msgs.Triangle(mesh.vertices[i][0], mesh.vertices[i][1], mesh.vertices[i][2]) for i in range(triangles.shape[0])]
scene_msg.world.collision_objects = object_msg.collision_objects
scene_publisher.publish(scene_msg)
```
这个函数会将点云转换为Open3D的PointCloud对象,然后使用`create_from_point_cloud_alpha_shape`函数进行三角化,生成Open3D的TriangleMesh对象。接下来,将TriangleMesh对象转换为MoveIt环境scene,并发布到MoveIt Planning Scene的话题上。
请注意,这个函数需要安装Open3D库。
相关推荐
最新推荐
ASP.NET技术在网站开发设计中的研究与开发(论文+源代码+开题报告)【ASP】.zip
ASP.NET技术在网站开发设计中的研究与开发(论文+源代码+开题报告)【ASP】
CycleGan和Pix2Pix是两个在图像到图像转换领域常用的深度学习模型
Cycle GAN和Pix2Pix都是强大的图像到图像的转换模型,但它们在应用场景、技术特点和训练数据要求等方面有所不同。Cycle GAN无需成对数据即可进行训练,适用于更广泛的图像转换任务;而Pix2Pix则依赖于成对数据进行训练,在处理具有明确对应关系的图像对时表现较好。在实际应用中,应根据具体任务和数据集的特点选择合适的模型。Cycle GAN广泛应用于各种图像到图像的转换任务,如风格迁移、季节变换、对象变形等。
由于其不需要成对数据的特性,Cycle GAN能够处理更广泛的图像数据集,并产生更多样化的结果。Pix2Pix是一个基于条件生成对抗网络(Conditional Generative Adversarial Networks, cGANs)的图像到图像的转换模型。它利用成对数据(即一一对应的图像对)进行训练,以学习从输入图像到输出图像的映射。Pix2Pix的生成器通常采用U-Net结构,而判别器则使用PatchGAN结构。
zigbee-cluster-library-specification
最新的zigbee-cluster-library-specification说明文档。
管理建模和仿真的文件
管理Boualem Benatallah引用此版本:布阿利姆·贝纳塔拉。管理建模和仿真。约瑟夫-傅立叶大学-格勒诺布尔第一大学,1996年。法语。NNT:电话:00345357HAL ID:电话:00345357https://theses.hal.science/tel-003453572008年12月9日提交HAL是一个多学科的开放存取档案馆,用于存放和传播科学研究论文,无论它们是否被公开。论文可以来自法国或国外的教学和研究机构,也可以来自公共或私人研究中心。L’archive ouverte pluridisciplinaire
MATLAB结构体与对象编程:构建面向对象的应用程序,提升代码可维护性和可扩展性
# 1. MATLAB结构体基础**
MATLAB结构体是一种数据结构,用于存储和组织相关数据。它由一系列域组成,每个域都有一个名称和一个值。结构体提供了对数据的灵活访问和管理,使其成为组织和处理复杂数据集的理想选择。
MATLAB中创建结构体非常简单,使用struct函数即可。例如:
```matlab
myStruct
详细描述一下STM32F103C8T6怎么与DHT11连接
STM32F103C8T6可以通过单总线协议与DHT11连接。连接步骤如下:
1. 将DHT11的VCC引脚连接到STM32F103C8T6的5V电源引脚;
2. 将DHT11的GND引脚连接到STM32F103C8T6的GND引脚;
3. 将DHT11的DATA引脚连接到STM32F103C8T6的GPIO引脚,可以选择任一GPIO引脚,需要在程序中配置;
4. 在程序中初始化GPIO引脚,将其设为输出模式,并输出高电平,持续至少18ms,以激活DHT11;
5. 将GPIO引脚设为输入模式,等待DHT11响应,DHT11会先输出一个80us的低电平,然后输出一个80us的高电平,
JSBSim Reference Manual
JSBSim参考手册,其中包含JSBSim简介,JSBSim配置文件xml的编写语法,编程手册以及一些应用实例等。其中有部分内容还没有写完,估计有生之年很难看到完整版了,但是内容还是很有参考价值的。
"互动学习:行动中的多样性与论文攻读经历"
多样性她- 事实上SCI NCES你的时间表ECOLEDO C Tora SC和NCESPOUR l’Ingén学习互动,互动学习以行动为中心的强化学习学会互动,互动学习,以行动为中心的强化学习计算机科学博士论文于2021年9月28日在Villeneuve d'Asq公开支持马修·瑟林评审团主席法布里斯·勒菲弗尔阿维尼翁大学教授论文指导奥利维尔·皮耶昆谷歌研究教授:智囊团论文联合主任菲利普·普雷教授,大学。里尔/CRISTAL/因里亚报告员奥利维耶·西格德索邦大学报告员卢多维奇·德诺耶教授,Facebook /索邦大学审查员越南圣迈IMT Atlantic高级讲师邀请弗洛里安·斯特鲁布博士,Deepmind对于那些及时看到自己错误的人...3谢谢你首先,我要感谢我的两位博士生导师Olivier和Philippe。奥利维尔,"站在巨人的肩膀上"这句话对你来说完全有意义了。从科学上讲,你知道在这篇论文的(许多)错误中,你是我可以依
MATLAB结构体与数据库交互:无缝连接数据存储与处理,实现数据管理自动化
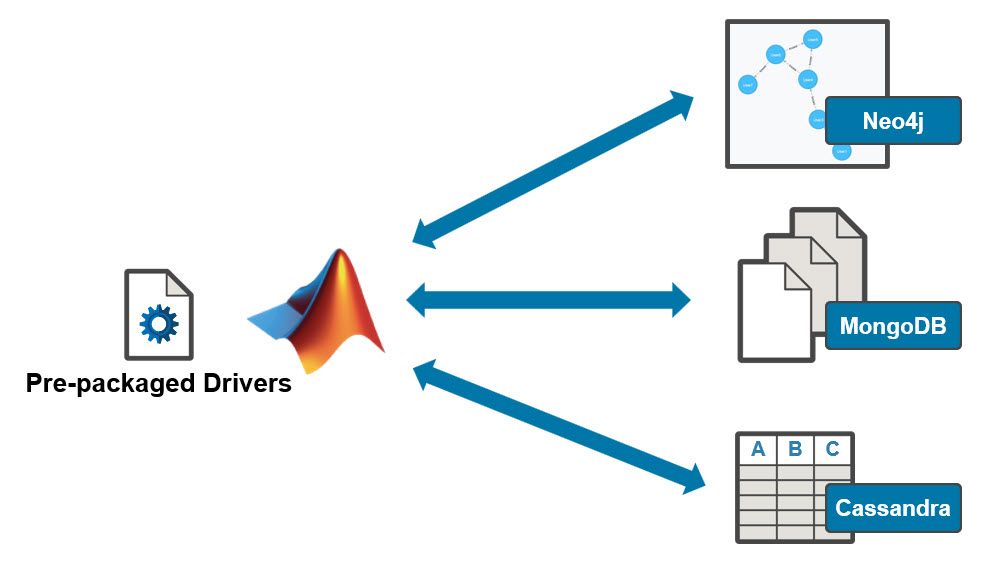
# 1. MATLAB结构体与数据库交互概述**
MATLAB结构体与数据库交互是一种强大的
Link your Unity
project to C# script in Visual Studio. Can you provide me with some guidance on this?
Yes, I can definitely help you with that! To link your Unity project to C# script in Visual Studio, you first need to make sure that you have both Unity and Visual Studio installed on your computer. Then, you can