无人机目标跟踪性能优化指南:提升实时性与效率的7大技巧
发布时间: 2024-12-15 20:25:53 阅读量: 2 订阅数: 3 

面向无人机的视觉目标跟踪算法:综述与展望.docx

参考资源链接:[无人机目标检测与跟踪:UAVDT数据集详解](https://wenku.csdn.net/doc/5v0ohz7igv?spm=1055.2635.3001.10343)
# 1. 无人机目标跟踪的理论基础
无人机目标跟踪技术的发展,是无人机技术应用领域的一个重要突破点。在理解其理论基础之前,我们需要对目标跟踪的概念有一个清晰的定义。
## 1.1 目标跟踪的定义
目标跟踪是一种通过分析和处理连续的图像或数据流,以识别、跟踪和预测目标动态行为的技术。在无人机应用中,目标跟踪通常涉及到对空中目标的实时识别和定位。
## 1.2 目标跟踪的工作流程
工作流程主要分为以下几个步骤:首先,通过无人机搭载的摄像机或传感器捕获目标图像;其次,利用目标检测技术从图像中提取目标位置信息;然后,应用目标跟踪算法持续更新目标状态信息;最后,根据实时数据实现对目标的动态预测和控制。
## 1.3 目标跟踪的关键技术
关键的技术包含目标检测、目标跟踪算法、实时数据处理等。深度学习技术在此领域显示出强大的能力,尤其是在复杂的场景下进行目标检测和跟踪。
通过以上内容,我们对无人机目标跟踪的理论基础有了一个初步的了解,为后续章节深入分析各种技术提供了基础。接下来,我们将探讨不同类别的目标跟踪技术,及其在无人机领域的应用和优化。
# 2. 无人机目标跟踪技术概述
### 2.1 目标跟踪技术的分类与原理
目标跟踪是无人机视觉系统中的核心功能之一,其主要任务是持续监测场景中的特定目标,即使目标暂时被遮挡或离开视野。目标跟踪技术的分类主要基于其工作原理,可以分为被动式跟踪技术和主动式跟踪技术。
#### 2.1.1 被动式跟踪技术
被动式跟踪技术是指系统不主动发出信号,而是依靠目标自身的特征,如颜色、形状、纹理等,来实现跟踪。被动式跟踪算法通常对环境较为敏感,因此在实际应用中需要针对特定环境进行预处理和特征提取优化。
被动式跟踪的典型算法包括:
- **卡尔曼滤波器(Kalman Filter)**:一种有效的递归滤波器,用于预测和校正线性系统的动态过程,常用于目标状态的预测和更新。
- **粒子滤波器(Particle Filter)**:通过一组随机样本(粒子)代表概率分布,并用它们来估计随机变量的后验概率密度函数。
- **Mean Shift算法**:一种基于梯度上升的方法,用于寻找概率密度函数的局部最大值。
被动式跟踪技术在多变的环境中可能会遇到挑战,尤其是当目标特征不明显或变化时。因此,被动式跟踪通常需要与其他技术结合使用。
#### 2.1.2 主动式跟踪技术
与被动式跟踪不同,主动式跟踪技术依赖于无人机主动发出的信号,比如雷达、红外、激光等。这些信号与被跟踪目标的反射或发射信号进行交互,进而完成跟踪。
主动式跟踪技术的优缺点如下:
- **优点**:主动式跟踪技术的抗干扰能力强,对恶劣天气和复杂背景具有更好的适应性。
- **缺点**:主动式跟踪系统的硬件要求高,成本较大;同时,主动式技术可能对被跟踪对象或周围环境造成干扰。
表 2-1 主动式与被动式跟踪技术对比
| 特性 | 被动式跟踪技术 | 主动式跟踪技术 |
| --- | --- | --- |
| 环境适应性 | 较弱,易受环境干扰 | 较强,抗干扰能力优秀 |
| 硬件要求 | 较低,成本控制较好 | 较高,成本较大 |
| 系统复杂度 | 较低 | 较高 |
| 隐私保护 | 优势较大,不主动干预环境 | 劣势较大,可能会干扰被跟踪对象 |
### 2.2 目标检测与识别技术
在无人机目标跟踪中,目标检测与识别技术是不可或缺的环节。它负责从输入的图像或视频中识别并定位感兴趣的目标。
#### 2.2.1 深度学习在目标检测中的应用
随着深度学习技术的发展,基于深度卷积神经网络(CNN)的目标检测算法已成为主流。代表性算法包括:
- **R-CNN系列**:Region-based Convolutional Neural Networks,包括R-CNN、Fast R-CNN、Faster R-CNN等。
- **YOLO系列**:You Only Look Once,适用于实时目标检测场景,YOLO v3、YOLO v4、YOLO v5等。
- **SSD**:Single Shot MultiBox Detector,能够实现实时检测,并保持相对较高的准确度。
深度学习的检测算法虽然效果优秀,但需要大量的标注数据进行训练,计算资源消耗大,模型部署的硬件要求较高。
#### 2.2.2 特征提取与目标识别技术
特征提取是从图像中提取出有助于识别目标的特征,通常使用SIFT(尺度不变特征变换)、HOG(方向梯度直方图)、SURF(加速稳健特征)等算法。这些算法能够提取图像的局部特征,对抗平移、旋转和尺度变化。
目标识别是对提取的特征进行分类,常用的方法包括:
- **支持向量机(SVM)**:利用超平面将不同类别的数据分开,适用于二分类问题。
- **随机森林**:通过构建多个决策树并进行投票来提高分类准确率和泛化能力。
- **深度学习分类器**:使用CNN作为特征提取器,再经过全连接层进行分类。
### 2.3 无人机定位与导航技术
无人机定位与导航是无人机自主飞行与目标跟踪的基础。定位通常指确定无人机自身在空间中的位置,而导航则是指导无人机从当前位置移动到目标位置。
#### 2.3.1 GPS与惯性导航系统(INS)
全球定位系统(GPS)提供位置、速度和时间信息,而惯性导航系统(INS)通过测量加速度和旋转速度来推算位置和方向。
联合使用GPS和INS可以形成一个互补系统,称为GPS/INS组合导航系统,能够在信号不好的环境下提供更稳定、更准确的定位信息。表 2-2 展示了GPS和INS的优点与限制。
表 2-2 GPS与INS系统的对比
| 特性 | GPS | INS |
| --- | --- | --- |
| 定位精度 | 空旷地区非常高,但城市等复杂环境中会受阻塞 | 不受外部环境影响,但随时间漂移 |
| 环境依赖 | 依赖卫星信号 | 仅依赖内部传感器 |
| 成本 | 较低 | 中等 |
| 延迟 | 有接收器处理时间延迟 | 实时性极高 |
#### 2.3.2 可视化SLAM技术
SLAM(Simultaneous Localization and Mapping,同时定位与建图)技术允许无人机在没有预先地图信息的情况下自主导航。SLAM可分为基于激光的SLAM(LIDAR-SLAM)和基于视觉的SLAM(Visual-SLAM)。
Visual-SLAM 使用相机来估计无人机的运动轨迹并构建环境地图。其中比较著名的算法有ORB-SLAM、LSD-SLAM等。这些算法通常包含如下步骤:
- **特征提取与匹配**:提取环境特征点并进行匹配。
- **位姿估计**:估计无人机相对于环境的位置和方向。
- **地图构建**:建立环境的三维地图。
- **闭环检测**:检测并修正累计误差,提高长期定位的准确性。
Visual-SLAM依赖于环境光照和纹理,因此,在光照条件差或纹理缺乏的场景中表现可能不佳。
综上所述,第二章介绍了无人机目标跟踪技术的基础知识,包括目标跟踪技术的分类、目标检测与识别技术以及定位与导航技术。这些技术为后续章节探讨优化方法提供了理论基础。在实际应用中,无人机目标跟踪系统需要将这些技术综合运用,以实现最佳的跟踪效果。接下来的章节将深入探讨提升无人机目标跟踪实时性的优化技巧。
# 3. 提升无人机目标跟踪实时性的优化技巧
在现代无人机技术中,目标跟踪实时性是衡量系统性能的关键指标之一。为了在复杂的动态环境中准确、实时地跟踪目标,对系统进行优化至关重要。本章节将深入探讨提升无人机目标跟踪实时性的多种优化技巧,并对每个技巧进行详尽的分析。
## 3.1 硬件加速与优化
硬件加速与优化是提高无人机目标跟踪实时性的基础。无人机的硬件平台限制了算法运行的速度和能耗,因此,选择合适的硬件并对其进行优化是实现高效率跟踪的关键。
### 3.1.1 使用专用硬件加速器
在无人机系统中,专用硬件加速器,如FPGA(现场可编程门阵列)或ASIC(专用集成电路),可以提供比通用处理器更高的计算速度和更低的功耗。这些专用硬件通过硬件级的优化设计,能够高效执行特定的任务。
```mermaid
flowchart LR
A[接收图像数据] --> B[专用硬件加速器]
B --> C[并行处理图像]
C --> D[输出处理结果]
D --> E[目标跟踪]
```
在执行图像处理任务时,专用硬件加速器可以并行处理多个图像数据,显著缩短处理时间。以FPGA为例,通过使用硬件描述语言(如VHDL或Verilog),开发者可以自定义硬件逻辑,为图像处理和目标跟踪算法量身定制数据处理路径。
### 3.1.2 优化硬件资源的分配
硬件资源的分配需要平衡计算和存储需求。例如,在图像处理中,大量数据需要快速读取和处理,这意味着内存带宽和处理单元之间的数据传输速率至关重要。
```mermaid
graph TD
A[启动无人机跟踪] --> B[资源分配]
B --> C[CPU资源]
B --> D[GPU资源]
B --> E[专用加速器资源]
C --> F[任务调度]
D --> F
E
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
AES算法深度解码:MixColumn变换的内部机制大公开

参考资源链接:[AES加密算法:MixColumn列混合详解](https://wenku.csdn.net/doc/2rcwh8h7ph
【SolidWorks建模速成】:零基础到复杂零件构建,只需5步!
参考资源链接:[SolidWorks初学者教程:从基础到草图绘制](https://wenku.csdn.net/doc/1zpbmv5282?spm=1055.2635.3001.10343)
# 1. SolidWorks建模入门基础
SolidWorks 是一款广受欢迎的3D CAD设计软件,适用于各种工程领域,包括机械设计、汽车、航空和其他工业设计。对于刚刚接触SolidWo
【HFSS栅球建模问题全攻略】:快速识别与解决建模难题

参考资源链接:[2015年ANSYS HFSS BGA封装建模教程:3D仿真与分析](https://wenku.csdn.net/doc/840stuyum7?spm=1055.2635.3001.10343)
# 1. HFSS栅球建模基础
在现代电磁工程领域,高频结构仿真软件(HFSS)已成为不可或缺的工具之一。本章将介绍HFSS栅球建模的基础知识,旨在为初学
Sonic Visualiser插件开发入门:打造个性化音频分析工具
参考资源链接:[Sonic Visualiser新手指南:详尽功能解析与实用技巧](https://wenku.csdn.net/doc/r1addgbr7h?spm=1055.2635.3001.10343)
# 1. Sonic Visualiser插件开发入门
## 简介
Sonic Visualiser 是一个功能强大的音频分析软件,它不仅提供了一个用户友好的界面用于查看和处理音频文件,还允许开发者通过插件机制扩展其功能。本章旨在为初学者介绍Sonic Visualiser插件开发的基本概念和入门步骤。
## 开发环境准备
在开始之前,你需要准备开发环境。推荐使用Python语言进
最优化案例研究

参考资源链接:[《最优化导论》习题答案](https://wenku.csdn.net/doc/6412b73fbe7fbd1778d499de?spm=1055.2635.3001.10343)
# 1. 最优化理论基础
最优化是数学和计算机科学中的一个重要分支,旨在找到问题中的最优解,即在
【机器学习优化高频CTA策略入门】:掌握数据预处理、回测与风险管理
参考资源链接:[基于机器学习的高频CTA策略研究:模型构建与策略回测](https://wenku.csdn.net/doc/4ej0nwiyra?spm=1055.2635.3001.10343)
# 1. 机器学习与高频CTA策略概述
## 机器学习与高频交易的交叉
在金融领域,尤其是高频交易(CTA)策略中,机器学习技术已成为一种创新力量,它使交易者能够从历史数据中发现复杂的模
【监控与优化】实时监控Wonderware Historian性能,提升效率

参考资源链接:[Wonderware Historian与DAServer配置详解:数据采集与存储教程](https://wenk
【TIA博途V16新用户必读】:5个快速上手项目的小技巧
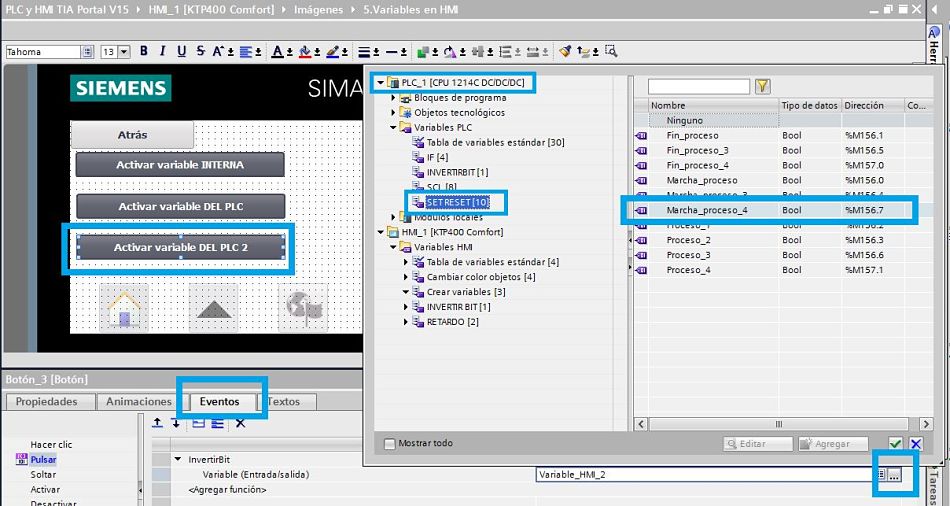
参考资源链接:[TIA博途V16仿真问题全解:启动故障与解决策略](https://wenku.csdn.net/doc/4x9dw4jntf?spm=1055.2635.3001.10343)
# 1. TIA博途V16界面概览
## 1.1 用户界面的初识
初识TIA博途V16,用
RK3588原理图设计深度解析:基础到高级优化技巧
参考资源链接:[RK3588硬件设计全套资料,原理图与PCB文件下载](https://wenku.csdn.net/doc/89nop3h5no?spm=1055.2635.3001.10343)
# 1. RK3588芯片架构概述
RK3588是Rockchip推出的一款高性能多核处理器,主要面向AI计算、高清视频处理和高端多媒体应用。本章将介绍RK3588的硬件架构,包括其内部构成、核心性能参数以
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )