无人机目标跟踪的多目标技术:算法详解与实践技巧
发布时间: 2024-12-15 21:06:37 阅读量: 1 订阅数: 3 

yolov5-使用yolov5实现的多目标跟踪算法-目标跟踪.zip

参考资源链接:[无人机目标检测与跟踪:UAVDT数据集详解](https://wenku.csdn.net/doc/5v0ohz7igv?spm=1055.2635.3001.10343)
# 1. 无人机目标跟踪概述
## 1.1 无人机目标跟踪的重要性
无人机目标跟踪是无人机自主系统中的关键技术之一,它能够在无人干预的情况下,自动检测和跟踪地面上的目标。这一技术的发展,使得无人机在军事侦察、灾害评估、农业监测以及空中交通管理等领域具有广泛的应用前景。
## 1.2 目标跟踪的定义与应用场景
目标跟踪指的是在连续的视频帧中,根据目标的运动规律,动态地检测和识别目标,以及预测目标的未来位置。在无人机应用中,目标跟踪不仅需要处理复杂的动态环境,还需要应对如天气变化、光照变化、遮挡等挑战。
## 1.3 无人机目标跟踪技术的挑战
无人机目标跟踪面临诸多挑战,包括但不限于目标的快速移动、遮挡、场景的复杂性、算法计算资源的限制等。应对这些挑战需要发展高效的算法,以及结合先进的传感器和计算机视觉技术。下一章节将深入探讨多目标跟踪的理论基础,以期为读者提供系统的认知框架。
# 2. 多目标跟踪的理论基础
### 2.1 目标跟踪算法的概念与分类
#### 2.1.1 跟踪算法的基本原则
目标跟踪算法的目的是在视频序列中准确地定位和跟踪一个或多个感兴趣的目标。一个优秀的跟踪算法需要满足以下几个基本原则:
- **连续性**:算法能够在一个视频帧到下一个视频帧之间维持跟踪目标的连续性,即使在目标移动、场景变化或遇到遮挡时也能保持稳定。
- **实时性**:能够以足够高的帧率运行,以满足实时跟踪的需求。
- **准确性和鲁棒性**:算法应对目标的外观变化、遮挡以及复杂的背景干扰具有较高的识别和跟踪准确性,同时保证在各种条件下都能保持稳定的性能。
#### 2.1.2 单目标与多目标跟踪的区别
单目标跟踪(Single Object Tracking, SOT)和多目标跟踪(Multi Object Tracking, MOT)是两种主要的目标跟踪类型。它们之间的主要区别在于处理目标数量的不同:
- **单目标跟踪**:一次处理一个目标,通常关注目标的形状、颜色、纹理等特征,并进行连续跟踪。
- **多目标跟踪**:同时处理多个目标,除了需要处理个体目标的特征之外,还需要解决目标之间的关联问题。
多目标跟踪特别关注在目标可能出现交互或交叉的情况下,如何有效地分辨并跟踪不同目标。这通常涉及到更为复杂的数据关联算法以及目标管理策略。
### 2.2 多目标跟踪的挑战与解决策略
#### 2.2.1 目标遮挡问题
在多目标跟踪过程中,目标之间或目标与环境之间的相互遮挡是一个常见的问题。一旦目标被遮挡,传统的跟踪算法很难处理,可能会导致跟踪丢失。
**解决策略**:
1. **跟踪器的适应性**:设计能够适应目标遮挡的跟踪算法,例如通过维护一个目标模型,即使在遮挡发生时也能维持跟踪。
2. **数据关联优化**:引入更复杂的关联策略,例如基于图的模型来处理遮挡情况下的目标关联问题。
```python
# 示例代码:使用深度学习进行目标检测,并在遮挡发生时进行特征更新
import torch
from tracking_module import Tracker
# 初始化跟踪器
tracker = Tracker()
# 假设 frame 是当前视频帧,detections 是目标检测模型输出的检测结果
frame = ...
detections = ...
# 跟踪目标
tracker.update(detections)
# 处理遮挡情况
if tracker.is_object_likely_to_be_occluded():
tracker.update_feature_representation(frame)
```
在这个代码块中,`Tracker.update` 方法负责在每个视频帧上更新跟踪状态,而当检测到遮挡时,`update_feature_representation` 方法会被调用来更新目标特征,以便更好地处理遮挡问题。
#### 2.2.2 算法的实时性优化
实时性是多目标跟踪算法的重要指标之一,尤其是在需要快速反应的应用中。算法的复杂度、数据预处理和后处理步骤都可能影响到算法的实时性能。
**解决策略**:
1. **硬件加速**:使用GPU或其他硬件加速器进行并行计算,以提高处理速度。
2. **算法简化**:设计更为简单的模型或减少算法复杂度,从而减少计算量。
#### 2.2.3 跟踪精度与鲁棒性的平衡
高精度和高鲁棒性的多目标跟踪算法是研究的难点。理想情况下,算法能够在各种复杂环境下提供稳定且准确的跟踪。
**解决策略**:
1. **多策略融合**:结合多种跟踪策略,如基于外观的跟踪与基于运动的跟踪相结合。
2. **在线学习机制**:采用在线学习方法来适应场景变化,并优化跟踪模型。
在实践中,针对实时性与跟踪精度的平衡问题,研究人员和工程师通常需要根据实际应用场景的需求,设计出满足特定性能指标的多目标跟踪系统。
# 3. 多目标跟踪算法详解
在第三章中,我们将深入探讨多目标跟踪算法的内部机制和分类。本章节会详细解释基于深度学习的多目标跟踪算法的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭秘音频数据的神秘面纱:Sonic Visualiser深度应用与高级技巧
参考资源链接:[Sonic Visualiser新手指南:详尽功能解析与实用技巧](https://wenku.csdn.net/doc/r1addgbr7h?spm=1055.2635.3001.10343)
# 1. 音频数据解析与Sonic Visualiser简介
音频数据解析是数字信号处理领域的一个重要分支,涉
ST-Link V2 原理图解读:从入门到精通的6大技巧
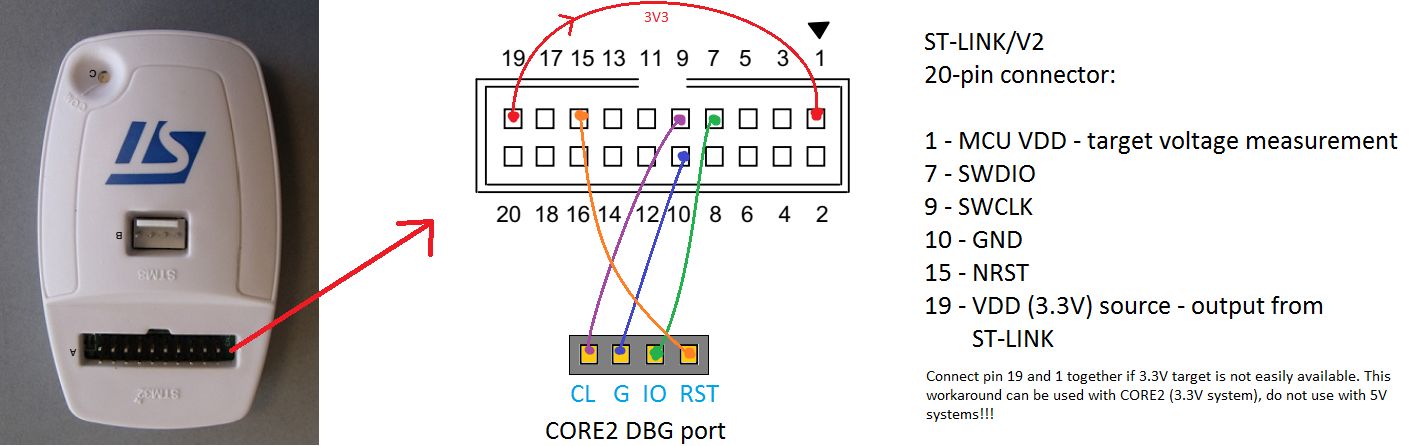
参考资源链接:[STLink V2原理图详解:构建STM32调试下载器](https://wenku.csdn.net/doc/646c5fd5d12cbe7ec3e52906?spm=1055.2635.3001.10343)
# 1. ST-Link V2简介与基础应用
ST-Link V2是一种广泛使用的调试器/编
Cognex VisionPro 标定流程优化攻略:8个秘诀帮你提升效率与准确性
参考资源链接:[Cognex VisionPro视觉标定流程详解:从九点标定到旋转中心计算](https://wenku.csdn.net/doc/6401abe0cce7214c316e9d24?spm=1055.2635.3001.10343)
# 1. Cognex VisionPro 标定流程概述
在现代工业自动化和计算机视觉领域中,准确的标定是至关重要的,它确保了系统可以正确理
【IEC62055-41数据交换全解】:智能电表通信的STS单程通信分析
参考资源链接:[IEC62055-41标准传输规范(STS).单程令牌载波系统的应用层协议.doc](https://wenku.csdn.net/doc/6401ad0ecce7214c316ee1f8?spm=1055.2635.3001.10343)
# 1. IEC62055-41标准概述
## 1.1 IEC62055-41标准
【WPF摄像头应用性能优化】:MediaKit实践中的8个关键提升点
参考资源链接:[WPF使用MediaKit调用摄像头](https://wenku.csdn.net/doc/647d456b543f84448829bbfc?spm=1055.2635.3001.10343)
# 1. WPF摄像头应用性能优化概述
在当今数字时代,视频捕获和处理是许多软件应用的核心部分,尤其是对于WPF(Windows Presentation Foun
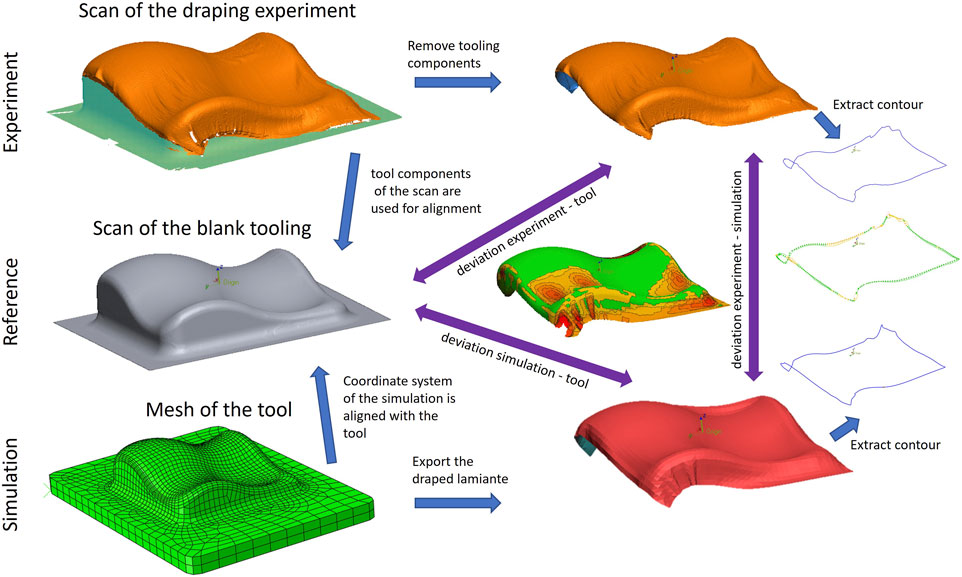
逼真3D效果的秘密:Geomagic Studio高级渲染技术
参考资源链接:[GeomagicStudio全方位操作教程:逆向工程与建模宝典](https://wenku.csdn.net/doc/6z60butf22?spm=1055.2635.3001.10343)
# 1. Geomagic Studio渲染技术概述
Geomagic Studio是一款被广泛使用的3D扫描和建模软件,其强大的渲
深度学习革新:NVIDIA Ampere架构的AI训练优化攻略

参考资源链接:[NVIDIA Ampere架构白皮书:A100 Tensor Core GPU详解与优势](https://wenku.csdn
用友U8备份策略灵活性:如何制定可扩展的备份计划
参考资源链接:[用友U8自动备份失效解决方案全攻略](https://wenku.csdn.net/doc/2h5qv6x3e0?spm=1055.2635.3001.10343)
# 1. 用友U8备份策略概述
在当今信息化时代,企业数据的完整性和安全性已经成为企业竞争力的重要组成部分。用友U8作为一款广泛应用于企业资源规划(ERP)的软件,其数据备份工作显得尤为重要。本章将从整体上对用友U
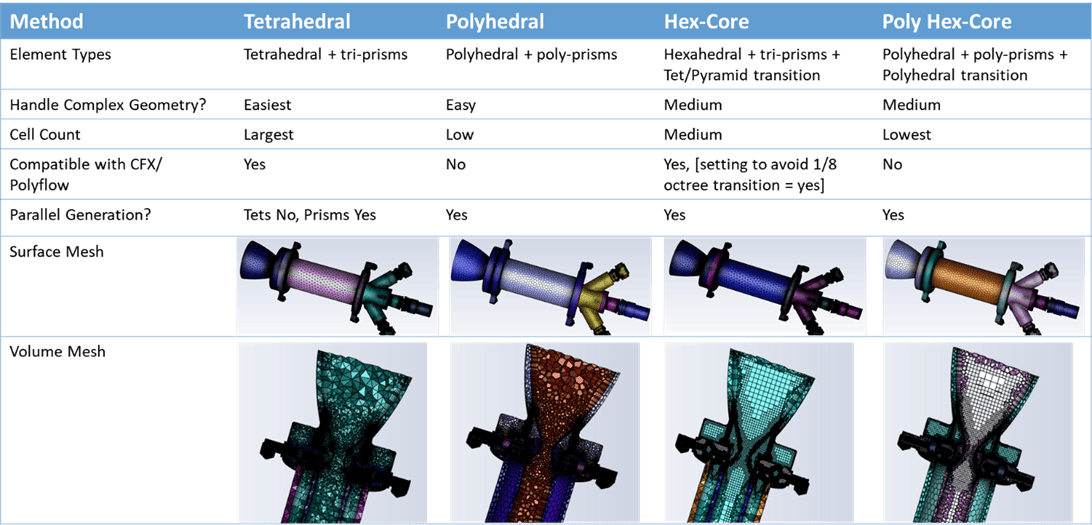
提升燃料电池仿真精度:ANSYS Fluent参数调整与案例分析
参考资源链接:[ANSYS_Fluent_15.0_燃料电池模块手册(en).pdf](https://wenku.csdn.net/doc/64619ad4543f844488937562?spm=1055.2635.3001.10343)
# 1. 燃料电池仿真概述
燃料电池作为清洁能源技术的核心设备之一,其性能与效率的提升对环境可持续
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )