麦克纳姆轮循迹中的坐标转换原理解析
发布时间: 2024-04-02 18:53:14 阅读量: 28 订阅数: 29 
# 1. 麦克纳姆轮原理简介
麦克纳姆轮作为一种特殊的轮子结构,在机器人领域中有着广泛的应用。本章将介绍麦克纳姆轮的定义、结构、工作原理以及在循迹中的应用。让我们一起深入了解这项技术的基础知识。
# 2. 坐标转换基础概念
在机器人领域中,坐标转换是一个非常重要的概念。下面我们将介绍坐标系的定义和作用,坐标转换的概念及意义,以及常见的坐标转换方法。
# 3. 麦克纳姆轮循迹中的运动规划
麦克纳姆轮在机器人运动规划中扮演着重要的角色,其独特的特性使得在循迹过程中需要进行特殊的运动规划。本章将介绍麦克纳姆轮循迹中的运动规划相关内容。
#### 3.1 麦克纳姆轮在机器人运动规划中的特殊性
麦克纳姆轮相比于传统车轮具有全向移动的特点,这就意味着在运动规划时需要考虑到多轮之间的协同运动,以实现预期的路径跟踪和运动控制。传统的路径规划算法需要针对麦克纳姆轮的特殊运动方式进行优化,以充分发挥其全向移动的优势。
#### 3.2 轨迹优化与运动控制
在麦克纳姆轮循迹中,轨迹优化和运动控制是整个过程中至关重要的环节。通过对轨迹进行优化,可以减少机器人在循迹过程中的误差,提高路径跟踪的精度;而良好的运动控制策略可以确保机器人在执行轨迹时稳定性和准确性。
#### 3.3 可行路径生成算法
针对麦克纳姆轮循迹中的运动规划,可行路径生成算法是至关重要的一环。这些算法可以根据机器人当前位置、目标位置和环境约束条件,生成可行的路径规划方案。常见的可行路径生成算法包括A*算法、Dijkstra算法等,需要根据具体情况选择合适的算法来实现有效的路径规划。
通过运动规划的优化和路径控制的精细调整,麦克纳姆轮在循迹过程中能够实现更加高效和精准的路径跟踪,从而提升机器人整体的运动性能。
# 4. 坐标转换在麦克纳姆轮循迹中的应用
在麦克纳姆轮循迹中,坐标转换是一项至关重要的技术,能够帮助机器人在整个运动过程中准确地确定位置和姿态。下面将详细介绍坐标转换在麦克纳姆轮循迹中的应用。
#### 4.1 坐标系间的转换关系
在麦克纳姆轮的运动中,通常会涉及到多个坐标系,包括机器人底盘坐标系、麦克纳姆轮坐标系、全局坐标系等。因此,需要进行不同坐标系间的转换,以便准确地描述和控制机器人的运动。
#### 4.2 麦克纳姆轮坐标转换的实际应用场景
坐标转换在麦

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏“麦克纳姆轮循迹代码”深入探讨了麦克纳姆轮在循迹任务中的应用。它涵盖了从硬件组装和接线到运动规划、轨迹生成、坐标转换和PID控制等各个方面的全面知识。专栏还深入探讨了模糊逻辑控制、遗传算法优化、强化学习和深度学习等高级控制技术在麦克纳姆轮循迹中的应用。此外,它还提供了有关SLAM算法、传感器融合、实时定位、机器视觉和云端数据分析等相关技术的见解。专栏还强调了安全性、可靠性和自动驾驶技术在麦克纳姆轮循迹中的重要性,为读者提供了全面而深入的麦克纳姆轮循迹指南。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PSO-SVM算法调优】:专家分享,提升算法效率与稳定性的秘诀
# 1. PSO-SVM算法概述
PSO-SVM算法结合了粒子群优化(PSO)和支持向量机(SVM)两种强大的机器学习技术,旨在提高分类和回归任务的性能。它通过PSO的全局优化能力来精细调节SVM的参数,优化后的SVM模型在保持高准确度的同时,展现出更好的泛化能力。本章将介绍PSO-SVM算法的来源、优势以及应用场景,为读者提供一个全面的理解框架。
## 1.1 算法来源与背景
PSO-SVM算法的来源基于两个领域:群体智能优化
【项目管理】:如何在项目中成功应用FBP模型进行代码重构
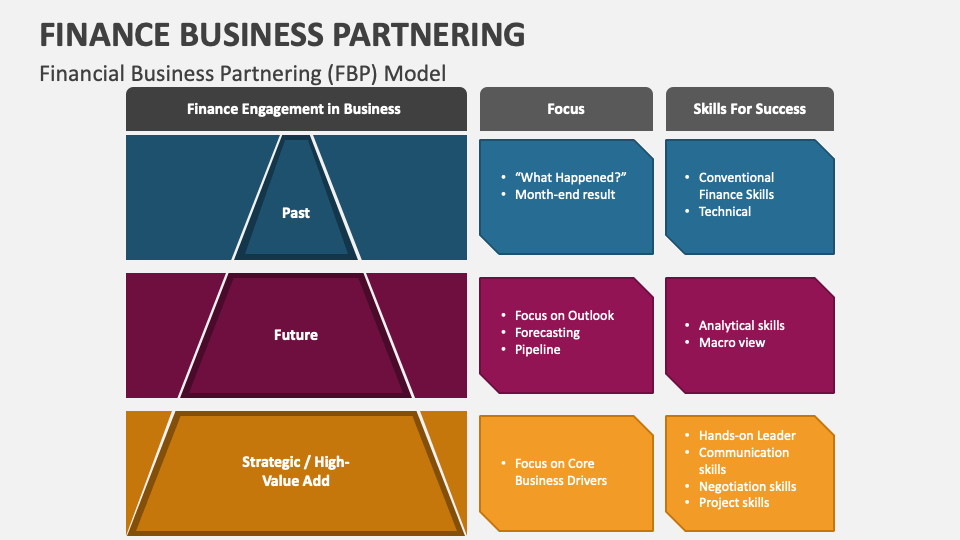
# 1. FBP模型在项目管理中的重要性
在当今IT行业中,项目管理的效率和质量直接关系到企业的成功与否。而FBP模型(Flow-Based Programming Model)作为一种先进的项目管理方法,为处理复杂
【同轴线老化与维护策略】:退化分析与更换建议

# 1. 同轴线的基本概念和功能
同轴电缆(Coaxial Cable)是一种广泛应用的传输介质,它由两个导体构成,一个是位于中心的铜质导体,另一个是包围中心导体的网状编织导体。两导体之间填充着绝缘材料,并由外部的绝缘护套保护。同轴线的主要功能是传输射频信号,广泛应用于有线电视、计算机网络、卫星通信及模拟信号的长距离传输等领域。
在物理结构上,
【可持续发展】:绿色交通与信号灯仿真的结合

# 1. 绿色交通的可持续发展意义
## 1.1 绿色交通的全球趋势
随着全球气候变化问题日益严峻,世界各国对环境保护的呼声越来越高。绿色交通作为一种有效减少污染、降低能耗的交通方式,成为实现可持续发展目标的重要组成部分。其核心在于减少碳排放,提高交通效率,促进经济、社会和环境的协调发展。
## 1.2 绿色交通的节能减排效益
相较于传统交通方式,绿色交
【Chirp信号抗干扰能力深入分析】:4大策略在复杂信道中保持信号稳定性
# 1. Chirp信号的基本概念
## 1.1 什么是Chirp信号
Chirp信号是一种频率随时间变化的信号,其特点是载波频率从一个频率值线性增加(或减少)到另一个频率值。在信号处理中,Chirp信号的这种特性被广泛应用于雷达、声纳、通信等领域。
## 1.2 Chirp信号的特点
Chirp信号的主要特点是其频率的变化速率是恒定的。这意味着其瞬时频率与时间
【模块化设计】S7-200PLC喷泉控制灵活应对变化之道

# 1. S7-200 PLC与喷泉控制基础
## 1.1 S7-200 PLC概述
S7-200 PLC(Programmable Logic Controller)是西门子公司生产的一款小型可编程逻辑控制器,广泛应用于自动化领域。其以稳定、高效、易用性著称,特别适合于小型自动化项目,如喷泉控制。喷泉控制系统通过PLC来实现水位控制、水泵启停以及灯光变化等功能,能大大提高喷泉的
【Android主题制作工具推荐】:提升设计和开发效率的10大神器
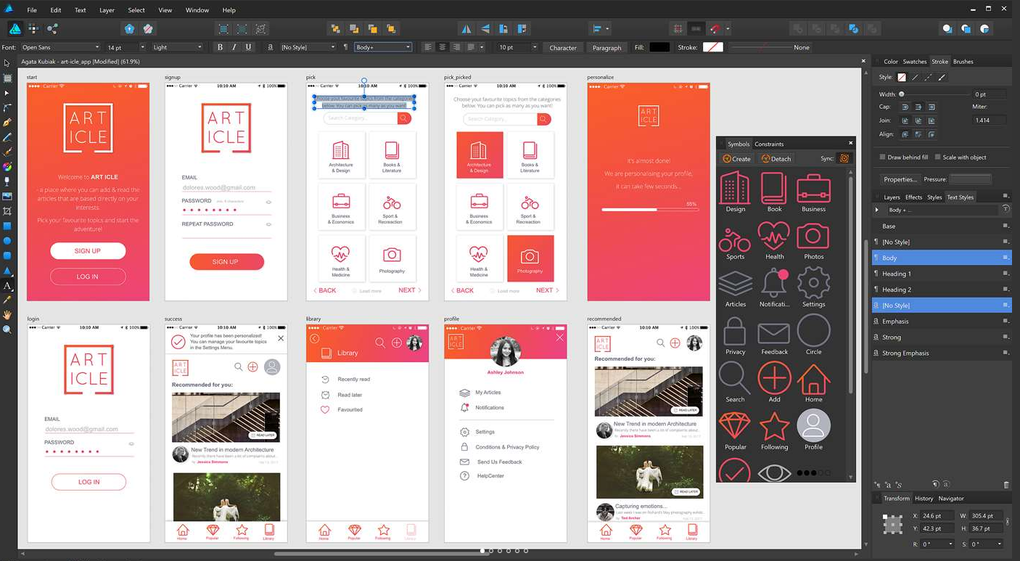
# 1. Android主题制作的重要性与应用概述
## 1.1 Android主题制作的重要性
在移动应用领域,优秀的用户体验往往始于令人愉悦的视觉设计。Android主题制作不仅增强了视觉吸引力,更重要的是它能够提供一致性的
【低功耗设计达人】:静态MOS门电路低功耗设计技巧,打造环保高效电路
# 1. 静态MOS门电路的基本原理
静态MOS门电路是数字电路设计中的基础,理解其基本原理对于设计高性能、低功耗的集成电路至关重要。本章旨在介绍静态MOS门电路的工作方式,以及它们如何通过N沟道MOSFET(NMOS)和P沟道MOSFET(PMOS)的组合来实现逻辑功能。
## 1.1 MOSFET的基本概念
MOSFET,全
视觉SLAM技术应用指南:移动机器人中的应用详解与未来展望

# 1. 视觉SLAM技术概述
## 1.1 SLAM技术的重要性
在机器人导航、增强现实(AR)和虚拟现实(VR)等领域,空间定位
【数据表结构革新】租车系统数据库设计实战:提升查询效率的专家级策略

# 1. 数据库设计基础与租车系统概述
## 1.1 数据库设计基础
数据库设计是信息系统的核心,它涉及到数据的组织、存储和管理。良好的数据库设计可以使系统运行更加高效和稳定。在开始数据库设计之前,我们需要理解基本的数据模型,如实体-关系模型(ER模型),它有助于我们从现实世界中抽象出数据结构。接下来,我们会探讨数据库的规范化理论,它是减少数据冗余和提高数据一致性的关键。规范化过程将引导我们分解数据表,确保每一部分数据都保持其独立性和
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )