麦克纳姆轮硬件组装与接线教程
发布时间: 2024-04-02 18:47:29 阅读量: 10 订阅数: 20 
# 1. 介绍麦克纳姆轮技术
## 1.1 什么是麦克纳姆轮?
麦克纳姆轮是一种特殊的车轮结构,由独立的轮辐组成,每个轮辐上还装有小轮,能够使车辆在不改变行进方向的情况下实现平移和旋转。
## 1.2 麦克纳姆轮的工作原理
麦克纳姆轮是利用轮辐上的小轮以特定的角度旋转,通过轮辐之间的相互作用产生侧向力,从而实现车辆的平移和旋转。
## 1.3 麦克纳姆轮在机器人领域的应用
麦克纳姆轮广泛应用于机器人领域,可以使机器人在狭窄空间内灵活移动,也常用于机器人搬运、比赛等场景中。
# 2. 准备工作及所需材料
麦克纳姆轮的硬件组装过程需要提前准备好一些必要的工具和材料,以确保顺利完成组装。在这一章节中,将介绍所需的硬件组件、工具准备以及一些建议的购买清单,帮助读者做好充分的准备工作。接下来我们将逐一介绍相关内容。
# 3. 硬件组装步骤
在这一部分,我们将详细介绍如何将麦克纳姆轮硬件组装到机器人底盘上,并连接驱动电机,确保一切安全稳固。
#### 3.1 安装麦克纳姆轮到底盘
首先,确定底盘的结构和大小,根据麦克纳姆轮的安装孔位,将麦克纳姆轮一个个固定到底盘上。确保麦克纳姆轮位置正确且稳固,以确保后续安装的顺利进行。
#### 3.2 连接麦克纳姆轮的驱动电机
将麦克纳姆轮的驱动电机根据说明书连接到底盘上,确保电机的安装位置和角度符合麦克纳姆轮的工作原理,这样可以保证麦克纳姆轮的正常运转。
#### 3.3 固定麦克纳姆轮的安装
使用螺丝将麦克纳姆轮和电机牢固地固定在底盘上,避免在运动过程中出现脱落或松动的情况。确保每个麦克纳姆轮都安装正确,紧固可靠,以确保整个机器人的稳定性和安全性。
# 4. 接线及电路连接
在这一章节中,我们将详细讨论如何正确进行麦克纳姆轮的接线及电路连接。
#### 4.1 驱动电机的电源接线
首先,确保你已经正确连接了麦克纳姆轮的驱动电机到主控板或电机驱动器上。接下来,接线驱动电机的电源供应。通常,这包括连接电机驱动器或主控板的电源输入端子到电源源头(如电池或电源模块)。
```python
# Python示例代码
import RPi.GPIO as GPIO
# 设置GPIO引脚
GPIO.setmode(GPIO.BCM)
GPIO.setup(12, GPIO.OUT)
# 连接驱动电机的电源
def connect_motor_power():
# 假设电源源头连接在GPIO引脚12
GPIO.output(12, GPIO.HIGH)
```
在这段Python示例代码中,我们使用了RPi.GPIO库来控制树莓派的GPIO引脚。通过将GPIO引脚设置为输出模式,并将引脚的电压设为高电平,来模拟连接驱动电机的电源。
#### 4.2 控制电路的连接
接下来,我们需要正确连接控制电路,以便可以通过主控板或电机驱动器来操控麦克纳姆轮的运动。这通常涉及将控制信号线连接到适当的引脚上。
```java
// Java示例代码
public class MotorControl {
// 连接控制电路
public void connectControlCircuit() {
int controlPin = 4; // 假设控制信号线连接在引脚4
setupControlPin(controlPin);
}
private void setupControlPin(int pin) {
// 设置引脚为输出模式
pinMode(pin, OUTPUT);
}
}
```
在这段Java示例代码中,我们创建了一个MotorControl类,并实现了连接控制电路的方法。通过将控制信号线连接到特定引脚,并设置该引脚为输出模式,从而实现了控制电路的连接。
#### 4.3 检查电路连线并调试
在完成了电源和控制电路的连接之后,务必进行检查,确保所有连线都正确连接。接着,可以通过调试程序来验证电路是否正常工作,以便后续进行麦克纳姆轮的测试和运动控制。
通过以上步骤,我们完成了麦克纳姆轮硬件组装与接线的关键步骤,为麦克纳姆轮的运动控制和应用打下了良好的基础。
# 5. 测试及故障排除
在完成麦克纳姆轮的硬件组装和接线后,接下来将进行测试以及可能的故障排除。在这一章节中,我们将详细介绍如何进行麦克纳姆轮的测试以及常见故障排除方法。
#### 5.1 进行麦克纳姆轮运动测试
在进行运动测试之前,请确保麦克纳姆轮的硬件连接已经正确。接下来,我们可以编写测试代码来控制麦克纳姆轮进行运动。以下是一个示例代码,用于控制麦克纳姆轮向前移动:
```python
# 导入相关库和模块
import time
# 向前移动函数
def move_forward(speed):
# 控制麦克纳姆轮向前移动
print("Moving forward with speed: ", speed)
time.sleep(1) # 模拟运动时间
# 停止麦克纳姆轮运动
print("Stop moving")
# 设置速度参数
speed = 50
# 调用移动函数
move_forward(speed)
```
#### 5.2 检查转向和灵活性
在进行运动测试时,还需要检查麦克纳姆轮的转向和灵活性。可以编写类似的代码来测试不同方向的移动,以确保麦克纳姆轮可以正常灵活转向。
#### 5.3 常见故障排除方法
在测试过程中,如果出现麦克纳姆轮无法正常运动或者出现异常情况,可以进行以下常见故障排除方法:
1. 检查电源连接是否正常
2. 检查控制信号是否正确发送
3. 检查电机驱动是否有问题
4. 检查麦克纳姆轮的安装是否牢固
通过以上步骤,可以帮助排除麦克纳姆轮运动测试中可能出现的问题,并确保麦克纳姆轮可以正常运行和灵活转向。
# 6. 麦克纳姆轮的优化和扩展
麦克纳姆轮作为一种特殊的轮子设计,在机器人领域有着广泛的应用。除了基本的硬件组装和接线之外,我们还可以通过一些优化和扩展来进一步提升麦克纳姆轮的性能和功能。
#### 6.1 调整麦克纳姆轮的性能
通过调整麦克纳姆轮的安装角度和驱动方式,可以改变机器人的运动特性。例如,调整轮子的安装角度可以改变机器人的旋转灵活性和稳定性;而采用不同的驱动方式,如PID控制,可以提高机器人的移动精度和响应速度。
```python
# 示例:使用PID算法控制麦克纳姆轮机器人的运动
class MecanumRobot:
def __init__(self):
self.pid_controller = PIDController() # 初始化PID控制器
def move(self, target_x, target_y):
current_x, current_y = self.get_current_position()
error_x = target_x - current_x
error_y = target_y - current_y
output_x = self.pid_controller.calculate_output(error_x)
output_y = self.pid_controller.calculate_output(error_y)
self.set_motor_speeds(output_x, output_y) # 设置驱动电机的速度
def set_motor_speeds(self, speed_x, speed_y):
# 控制驱动电机运动
pass
```
##### 6.2 添加传感器和控制模块
通过添加各类传感器(如红外线传感器、超声波传感器、视觉传感器等)和控制模块(如Arduino、Raspberry Pi等),可以实现更加智能化的麦克纳姆轮机器人。传感器可以帮助机器人感知周围环境,控制模块则可以对传感器数据进行处理,并制定相应的控制策略。
```java
// 示例:使用Arduino控制麦克纳姆轮机器人的自动避障功能
public class MecanumRobot {
private ArduinoController arduino = new ArduinoController();
private UltrasonicSensor sensor = new UltrasonicSensor();
public void avoidObstacle() {
if (sensor.detectObstacle()) {
arduino.moveBackward();
arduino.rotateLeft();
} else {
arduino.moveForward();
}
}
}
```
###### 6.3 探索更多的麦克纳姆轮应用领域
除了在机器人领域应用广泛之外,麦克纳姆轮还可以在其他领域发挥作用,如无人车、智能搬运设备、航空航天等。未来随着技术的不断进步和创新,麦克纳姆轮必将在更多领域展现其优越性能,为人类生产生活带来便利和效率提升。
在实际的项目中,我们可以根据具体的需求和场景进行进一步的定制和扩展,充分发挥麦克纳姆轮的潜力,创造出更加智能、灵活的机器人系统。
0
0
相关推荐

专栏简介
专栏“麦克纳姆轮循迹代码”深入探讨了麦克纳姆轮在循迹任务中的应用。它涵盖了从硬件组装和接线到运动规划、轨迹生成、坐标转换和PID控制等各个方面的全面知识。专栏还深入探讨了模糊逻辑控制、遗传算法优化、强化学习和深度学习等高级控制技术在麦克纳姆轮循迹中的应用。此外,它还提供了有关SLAM算法、传感器融合、实时定位、机器视觉和云端数据分析等相关技术的见解。专栏还强调了安全性、可靠性和自动驾驶技术在麦克纳姆轮循迹中的重要性,为读者提供了全面而深入的麦克纳姆轮循迹指南。
专栏目录
最低0.47元/天 解锁专栏
VIP年卡限时特惠
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
最新推荐
MATLAB神经网络与物联网:赋能智能设备,实现万物互联

# 1. MATLAB神经网络简介**
MATLAB神经网络是一个强大的工具箱,用于开发和部署神经网络模型。它提供了一系列函数和工具,使研究人员和工程师能够轻松创建、训练和评估神经网络。
MATLAB神经网络工具箱包括各种神经网络类型,包括前馈网络、递归网络和卷积网络。它还提供了一系列学习算法,例如反向传播和共轭梯度法。
MATLAB神经网络工具箱在许多领域都有应用,包括
遵循MATLAB最佳实践:编码和开发的指南,提升代码质量
# 1. MATLAB最佳实践概述**
MATLAB是一种广泛用于技术计算和数据分析的高级编程语言。MATLAB最佳实践是一套准则,旨在提高MATLAB代码的质量、可读性和可维护性。遵循这些最佳实践可以帮助开发者编写更可靠、更有效的MATLAB程序。
MATLAB最佳实践涵盖了广泛的主题,包括编码规范、开发实践和高级编码技巧。通过遵循这些最佳实践,开发者可以提高代码的质量,
【实战演练】时间序列预测用于个体家庭功率预测_ARIMA, xgboost, RNN

# 1. 时间序列预测简介**
时间序列预测是一种预测未来值的技术,其基于历史数据中的时间依赖关系。它广泛应用于各种领域,例如经济、金融、能源和医疗保健。时间序列预测模型旨在捕捉数据中的模式和趋势,并使用这些信息来预测未来的值。
# 2. 时间序列预测方法
时间序列预测方法是利用历史数据来预测未来趋势或值的统计技术。在时间序列预测中,有许多不
MATLAB GUI设计:创建交互式图形用户界面,打造直观体验
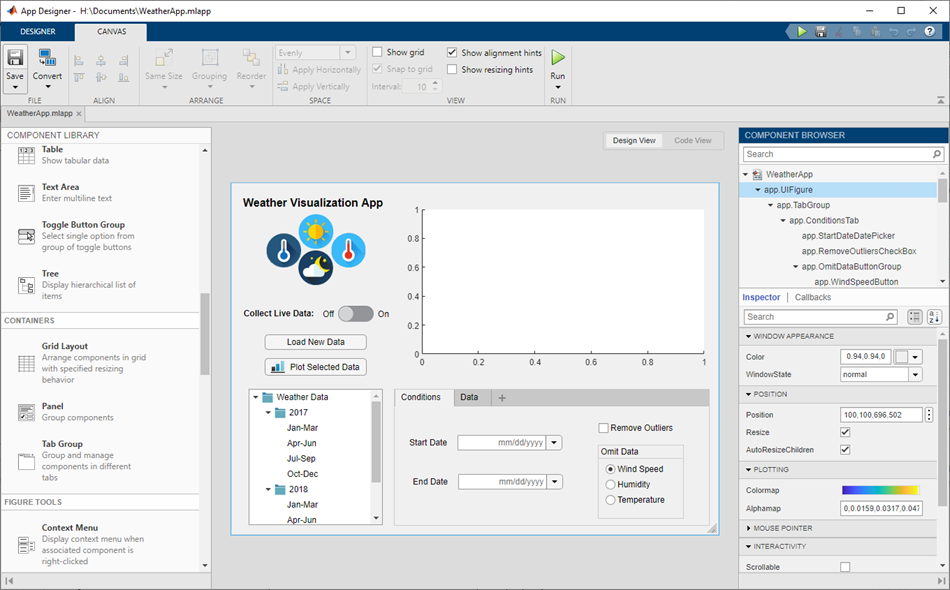
# 1. GUI设计基础**
GUI(图形用户界面)设计是创建交互式、用户友好的应用程序的关键。它涉及到布局设计、控件选择和事件处理。
**布局设计**
布局管理器是用于组织GUI元素(如按钮、文本框)的框架。MATLAB提供了几种布局管理器,如网格布局、流布局和边界布局,允许灵活地排列元素。
**控件选择**
MATLAB提供了丰富的控件库,包括按钮、文本框、滑块和菜单。选择合
MATLAB求导在航空航天中的作用:助力航空航天设计,征服浩瀚星空

# 1. MATLAB求导基础**
MATLAB求导是计算函数或表达式导数的强大工具,广泛应用于科学、工程和数学领域。
在MATLAB中,求导可以使用`diff()`函数。`diff()`函数接受一个向量或矩阵作为输入,并返回其导数。对于向量,`diff()`计算相邻元素之间的差值;对于矩阵,`diff()`计算沿指定维度的差值。
例如,计算函数 `f(x) = x^2
MATLAB常见问题解答:解决MATLAB使用中的常见问题

# 1. MATLAB常见问题概述**
MATLAB是一款功能强大的技术计算软件,广泛应用于工程、科学和金融等领域。然而,在使用MA
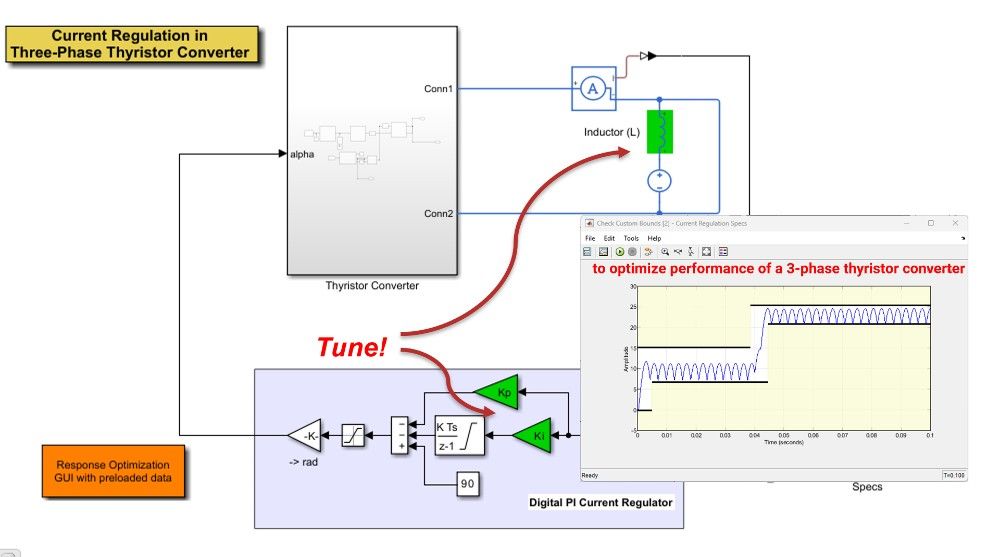
【实战演练】增量式PID的simulink仿真实现
# 2.1 Simulink仿真环境简介
Simulink是MATLAB中用于建模、仿真和分析动态系统的图形化环境。它提供了一个直观的用户界面,允许用户使用块和连接线来创建系统模型。Simulink模型由以下元素组成:
- **子系统:**将复杂系统分解成更小的、可管理的模块。
- **块:**代表系统中的组件,如传感器、执行器和控制器。
- **连接线:**表示信号在块之间的流动。
Simulink仿真环境提供了广泛的块库,涵盖了各种工程学科,包括控制系统、电子和机械工程。它还支持用户自定义块的创建,以满足特定仿真需求。
# 2. Simulink仿真环境的搭建和建模
### 2.
MATLAB四舍五入在物联网中的应用:保证物联网数据传输准确性,提升数据可靠性
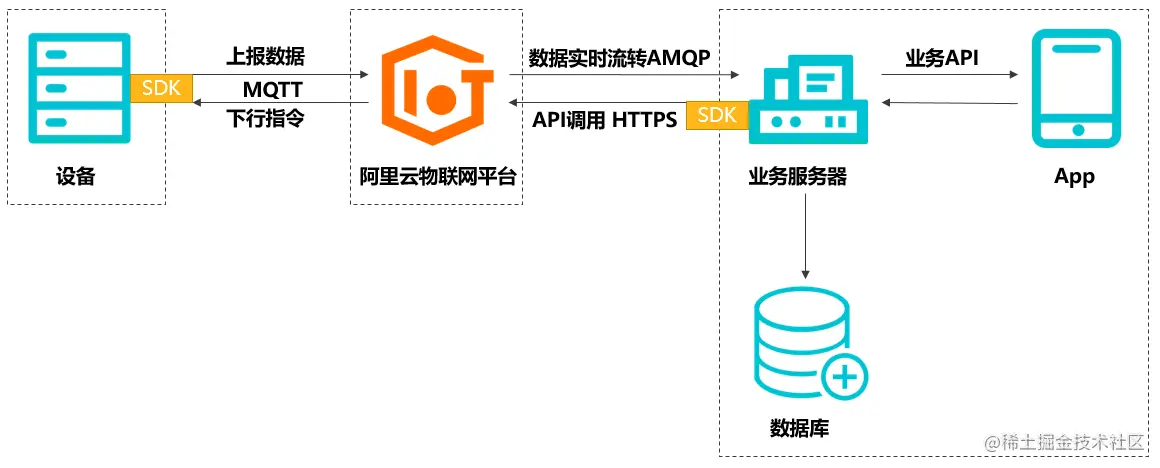
# 1. MATLAB四舍五入概述
MATLAB四舍五入是一种数学运算,它将数字舍入到最接近的整数或小数。四舍五入在各种应用中非常有用,包括数据分析、财务计算和物联网。
MATLAB提供了多种四舍五入函数,每个函数都有自己的特点和用途。最常
【实战演练】LTE通信介绍及MATLAB仿真
# 1. **2.1 MATLAB软件安装和配置**
MATLAB是一款强大的数值计算软件,广泛应用于科学、工程和金融等领域。LTE通信仿真需要在MATLAB环境中进行,因此需要先安装和配置MATLAB软件。
**安装步骤:**
1. 从MathWorks官网下载MATLAB安装程序。
2. 按照提示安装MATLAB。
3. 安装完成后,运行MATLAB并激活软件。
**配置步骤:**
1. 打开MATLAB并选择"偏好设置"。
2. 在"路径"选项卡中,添加LTE通信仿真工具箱的路径。
3. 在"文件"选项卡中,设置默认工作目录。
4. 在"显示"选项卡中,调整字体大小和窗口布局。
【进阶篇】将C++与MATLAB结合使用(互相调用)方法
# 2.1 MATLAB引擎的创建和初始化
### 2.1.1 MATLAB引擎的创
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
VIP年卡限时特惠
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )