ORB算法综合指南:图像处理与识别的全方位解析
发布时间: 2024-08-14 18:30:17 阅读量: 29 订阅数: 33 
# 1. ORB算法概述**
ORB(Oriented FAST and Rotated BRIEF)算法是一种快速、鲁棒的特征检测和描述算法,广泛应用于图像处理和识别领域。它基于FAST(Features from Accelerated Segment Test)特征检测器和BRIEF(Binary Robust Independent Elementary Features)描述符,具有以下特点:
- **快速高效:**ORB算法的计算速度快,能够实时处理大尺寸图像。
- **鲁棒性强:**ORB算法对光照变化、旋转、尺度变化和噪声具有较强的鲁棒性。
- **描述符简洁:**ORB算法的描述符长度较短,仅为256位,便于存储和匹配。
# 2. ORB算法理论基础
### 2.1 特征提取与描述
ORB(Oriented FAST and Rotated BRIEF)算法是一种用于图像特征提取和描述的算法。其核心思想是将图像中的特征点提取出来,并通过BRIEF(Binary Robust Independent Elementary Features)描述符对特征点进行描述。
**特征点提取**
ORB算法使用FAST(Features from Accelerated Segment Test)算法提取图像中的特征点。FAST算法是一种快速且鲁棒的特征点检测算法,它通过比较像素的灰度值来检测图像中具有明显亮度变化的点。具体来说,FAST算法对每个像素进行以下操作:
1. 以像素为中心,选择一个圆形区域。
2. 计算圆形区域内像素的灰度值和。
3. 如果圆形区域内像素的灰度值和大于或小于阈值,则该像素被标记为特征点。
**特征点描述**
提取特征点后,ORB算法使用BRIEF描述符对特征点进行描述。BRIEF描述符是一种二进制描述符,它通过比较特征点周围像素的灰度值来生成一个二进制字符串。具体来说,BRIEF描述符对每个特征点进行以下操作:
1. 以特征点为中心,选择一个圆形区域。
2. 随机选择一对像素,并比较它们的灰度值。
3. 如果第一个像素的灰度值大于第二个像素的灰度值,则在二进制字符串中写入一个1,否则写入一个0。
4. 重复步骤2和3,直到生成一个长度为256的二进制字符串。
### 2.2 匹配与识别
特征点提取和描述完成后,ORB算法使用匹配和识别算法来找到图像之间的对应特征点。
**匹配**
ORB算法使用汉明距离来匹配特征点。汉明距离是两个二进制字符串之间的距离度量,它计算两个字符串中不同比特位的数量。ORB算法对每个特征点,计算它与其他图像中所有特征点的汉明距离,并选择汉明距离最小的特征点作为匹配点。
**识别**
匹配完成后,ORB算法使用RANSAC(Random Sample Consensus)算法来识别图像之间的对应特征点。RANSAC算法通过随机选择一组匹配点,并使用这些匹配点估计图像之间的变换矩阵。如果估计的变换矩阵满足一定的阈值,则认为图像之间存在匹配。
**代码块:**
```python
import cv2
# 读取图像
image1 = cv2.imread('image1.jpg')
image2 = cv2.imread('image2.jpg')
# 提取特征点和描述符
orb = cv2.ORB_create()
keypoints1, descriptors1 = orb.detectAndCompute(image1, None)
keypoints2, descriptors2 = orb.detectAndCompute(image2, None)
# 匹配特征点
matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
matches = matcher.match(descriptors1, descriptors2)
# 识别对应特征点
ransac = cv2.RANSACTransform()
H, mask = ransac.estimateTransform(keypoints1, keypoints2, matches)
# 可视化匹配结果
matched_image = cv2.drawMatches(image1, keypoints1, image2, keypoints2, matches, None)
cv2.imshow('Matched Image', matched_image)
cv2.waitKey(0)
```
**代码逻辑分析:**
1. 读取两幅图像。
2. 使用ORB算法提取特征点和描述符。
3. 使用汉明距离匹配特征点。
4. 使用RANSAC算法识别对应特征点。
5. 可视化匹配结果。
**参数说明:**
* `cv2.ORB_create()`:创建ORB算法对象。
* `detectAndCompute()`:提取特征点和描述符。
* `matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)`:创建匹配器对象,使用汉明距离和交叉检查。
* `match()`:匹配特征点。
* `ransac = cv2.RANSACTransform()`:创建RANSAC算法对象。
* `estimateTransform()`:估计图像之间的变换矩阵。
* `drawMatches()`:可视化匹配结果。
# 3. ORB算法实践应用**
### 3.1 图像匹配与拼接
ORB算法在图像匹配与

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏“OpenCV特征提取ORB”深入探讨了ORB算法在图像处理和计算机视觉领域的广泛应用。从揭秘其原理到实战指南,从图像匹配到物体识别,再到医学图像处理和无人驾驶图像识别,专栏全面解析了ORB算法的各个方面。此外,还介绍了ORB算法的扩展和变形,以及与深度学习的融合,解锁了图像识别的创新之路。专栏还涵盖了ORB算法在工业检测、人脸识别、增强现实、虚拟现实和游戏开发等领域的应用,展示了其作为图像处理和识别利器的强大功能。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MATLAB C4.5算法性能提升秘籍】:代码优化与内存管理技巧

# 摘要
本论文首先概述了MATLAB中C4.5算法的基础知识及其在数据挖掘领域的应用。随后,探讨了MATLAB代码优化的基础,包括代码效率原理、算法性能评估以及优化技巧。深入分析了MATLAB内存管理的原理和优化方法,重点介绍了内存泄漏的检测与预防
【稳定性与混沌的平衡】:李雅普诺夫指数在杜芬系统动力学中的应用

# 摘要
本文旨在介绍杜芬系统的概念与动力学基础,深入分析李雅普诺夫指数的理论和计算方法,并探讨其在杜芬系统动力学行为和稳定性分析中的应用。首先,本文回顾了杜芬系统的动力学基础,并对李雅普诺夫指数进行了详尽的理论探讨,包括其定义、性质以及在动力系统中的角色。
QZXing在零售业中的应用:专家分享商品快速识别与管理的秘诀

# 摘要
QZXing作为一种先进的条码识别技术,在零售业中扮演着至关重要的角色。本文全面探讨了QZXing在零售业中的基本概念、作用以及实际应用。通过对QZXing原理的阐述,展示了其在商品快速识别中的核心技术优势,例如二维码识别技术及其在不同商品上的应用案例。同时,分析了QZXing在提高商品识别速度和零售效率方面的实际效果
【AI环境优化高级教程】:Win10 x64系统TensorFlow配置不再难

# 摘要
本文详细探讨了在Win10 x64系统上安装和配置TensorFlow环境的全过程,包括基础安装、深度环境配置、高级特性应用、性能调优以及对未来AI技术趋势的展望。首先,文章介绍了如何选择合适的Python版本以及管理虚拟环境,接着深入讲解了GPU加速配置和内存优化。在高级特性应用
【宇电温控仪516P故障解决速查手册】:快速定位与修复常见问题

# 摘要
本文全面介绍了宇电温控仪516P的功能特点、故障诊断的理论基础与实践技巧,以及常见故障的快速定位方法。文章首先概述了516P的硬件与软件功能,然后着重阐述了故障诊断的基础理论,包括故障的分类、系统分析原理及检测技术,并分享了故障定位的步骤和诊断工具的使用方法。针对516P的常见问题,如温度显示异常、控制输出不准确和通讯故障等,本文提供了详尽的排查流程和案例分析,并探讨了电气组件和软件故障的修复方法。此外
【文化变革的动力】:如何通过EFQM模型在IT领域实现文化转型
# 摘要
EFQM模型是一种被广泛认可的卓越管理框架,其在IT领域的适用性与实践成为当前管理创新的重要议题。本文首先概述了EFQM模型的核心理论框架,包括五大理念、九个基本原则和持续改进的方法论,并探讨了该模型在IT领域的具体实践案例。随后,文章分析了EFQM模型如何在IT企业文化中推动创新、强化团队合作以及培养领导力和员工发展。最后,本文研究了在多样化
RS485系统集成实战:多节点环境中电阻值选择的智慧
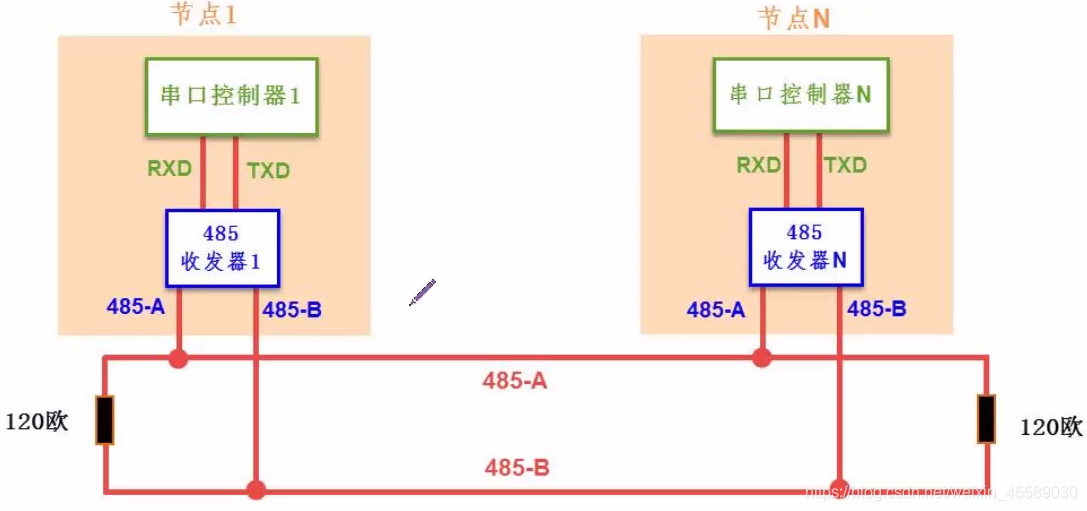
# 摘要
本文系统性地探讨了RS485系统集成的基础知识,深入解析了RS485通信协议,并分析了多节点RS485系统设计中的关键原则。文章
【高级电磁模拟】:矩量法在复杂结构分析中的决定性作用
# 摘要
本文全面介绍了电磁模拟与矩量法的基础理论及其应用。首先,概述了矩量法的基本概念及其理论基础,包括电磁场方程和数学原理,随后深入探讨了积分方程及其离散化过程。文章着重分析了矩量法在处理多层介质、散射问题及电磁兼容性(EMC)方面的应用,并通过实例展示了其在复杂结构分析中的优势。此外,本文详细阐述了矩量法数值模拟实践,包括模拟软件的选用和模拟流程,并对实际案例
SRIO Gen2在云服务中的角色:云端数据高效传输技术深度支持

# 摘要
本文旨在深入探讨SRIO Gen2技术在现代云服务基础架构中的应用与实践。首先,文章概述了SRIO Gen2的技术原理,及其相较于传统IO技术的显著优势。然后,文章详细分析了SRIO Gen2在云服务中尤其是在数据中心的应用场景,并提供了实际案例研
先农熵在食品质量控制的重要性:确保食品安全的科学方法

# 摘要
本文深入探讨了食品质量控制的基本原则与重要性,并引入先农熵理论,阐述其科学定义、数学基础以及与热力学第二定律的关系。通过对先农熵在食品稳定性和保质期预测方面作用的分析,详细介绍了先农熵测量技术及其在原料质量评估、加工过程控制和成品质量监控中的应用。进一步,本文探讨了先农熵与其他质量控制方法的结合,以及其在创新食品保存技术和食品安全法规标准中的应用。最后,通过案例分析,总结了先农熵在食品质量控制中
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )