无人驾驶图像识别之钥:ORB算法的应用与优化
发布时间: 2024-08-14 18:27:50 阅读量: 29 订阅数: 23 

图像处理大作业-无人驾驶视觉项目.zip

# 1. 无人驾驶图像识别的概述**
无人驾驶图像识别是计算机视觉领域的一个分支,旨在让计算机系统能够理解和解释图像中的场景,从而实现无人驾驶汽车的安全可靠运行。它涉及图像处理、特征提取、模式识别等技术,用于检测和识别道路上的行人、车辆、交通标志等物体。
无人驾驶图像识别技术在无人驾驶汽车中发挥着至关重要的作用。通过对图像的实时分析,车辆可以感知周围环境,做出决策,并采取相应的行动。例如,识别行人可以触发紧急制动,识别交通标志可以调整车速和行驶路线。
# 2. ORB算法在无人驾驶图像识别中的应用
### 2.1 ORB算法的原理和优势
ORB(Oriented FAST and Rotated BRIEF)算法是一种用于图像特征提取和描述的算法,它在无人驾驶图像识别中具有广泛的应用。ORB算法的主要原理如下:
- **特征点提取:**ORB算法使用FAST算法提取图像中的特征点。FAST算法通过比较像素与其周围像素的亮度值,来识别图像中角点和边缘点等特征点。
- **特征描述:**提取特征点后,ORB算法使用BRIEF算法计算特征描述子。BRIEF算法通过比较像素对的亮度值,来生成一个二进制描述符。ORB算法对BRIEF描述符进行了旋转不变性处理,使其能够识别旋转后的特征点。
ORB算法具有以下优势:
- **计算效率高:**ORB算法的计算速度快,能够实时处理图像数据,满足无人驾驶系统对实时性的要求。
- **鲁棒性强:**ORB算法对图像噪声、光照变化和旋转等因素具有较强的鲁棒性,能够在复杂的环境中稳定地识别特征点。
- **旋转不变性:**ORB算法的特征描述子具有旋转不变性,能够识别旋转后的特征点,这对于无人驾驶中车辆姿态变化的场景非常重要。
### 2.2 ORB算法在无人驾驶图像识别中的具体应用
ORB算法在无人驾驶图像识别中有着广泛的应用,包括:
- **环境感知:**ORB算法可以用于检测和识别道路上的行人、车辆、交通标志等障碍物,为无人驾驶系统提供环境感知能力。
- **路径规划:**ORB算法可以用于提取道路特征点,并通过匹配这些特征点来构建道路地图,为无人驾驶系统提供路径规划能力。
- **定位和导航:**ORB算法可以用于图像定位和导航,通过匹配图像中的特征点与已知的环境地图,来确定无人驾驶车辆的当前位置和行驶方向。
**代码示例:**
```python
import cv2
# 读取图像
image = cv2.imread("image.jpg")
# ORB特征提取
orb = cv2.ORB_create()
keypoints, descriptors = orb.detectAndCompute(image, None)
# 绘制特征点
cv2.drawKeypoints(image, keypoints, image, color=(0, 255, 0))
# 显示图像
cv2.imshow("ORB特征点", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
这段代码使用OpenCV库中的ORB算法提取图像中的特征点。ORB_create()函数创建ORB特征检测器,detectAndCompute()函数同时提取特征点和计算特征描述子。drawKeypoints()函数将特征点绘制在图像上。
**参数说明:**
- image:输入图像
- keypoi

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏“OpenCV特征提取ORB”深入探讨了ORB算法在图像处理和计算机视觉领域的广泛应用。从揭秘其原理到实战指南,从图像匹配到物体识别,再到医学图像处理和无人驾驶图像识别,专栏全面解析了ORB算法的各个方面。此外,还介绍了ORB算法的扩展和变形,以及与深度学习的融合,解锁了图像识别的创新之路。专栏还涵盖了ORB算法在工业检测、人脸识别、增强现实、虚拟现实和游戏开发等领域的应用,展示了其作为图像处理和识别利器的强大功能。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
新手必读:VITA57.1接口卡标准规范与应用入门
# 摘要
VITA57.1接口卡作为模块化标准平台,对现代电子系统的硬件扩展和性能优化发挥着关键作用。本文首先介绍了VITA57.1接口卡的基本概念、标准规范及其在硬件结构方面的详细剖析,包括物理特性、模块化设计、热管理和散热解决方案。随后,文章探讨了软件支持与开发环境,涉及驱动程序、开发工具、调试环境以及与主流平台的集成方法。在应用案例分
四层板协同设计:信号层与电源层的完美配合

# 摘要
随着电子系统复杂性的增加,四层板设计在高速数字系统中的应用日益广泛。本文首先介绍了四层板设计的基本概念,随后深入探讨了信号层设计的理论基础,包括信号完整性的定义、影响以及布局原则,并分析了信号层与电源层的交互作用。第三章详述了电源层设计的结构、功能、设计原则及其与信号层的协同优化。第四章通过实际案例分析和测试验证,展示了信号层与电源层设计的应用实践。最后,第五章展望了四层板设计在高速数字系统、热管理、电磁兼容性方
【IQ2010 WIFI频段干扰解决方案】:提升无线网络性能的秘密武器
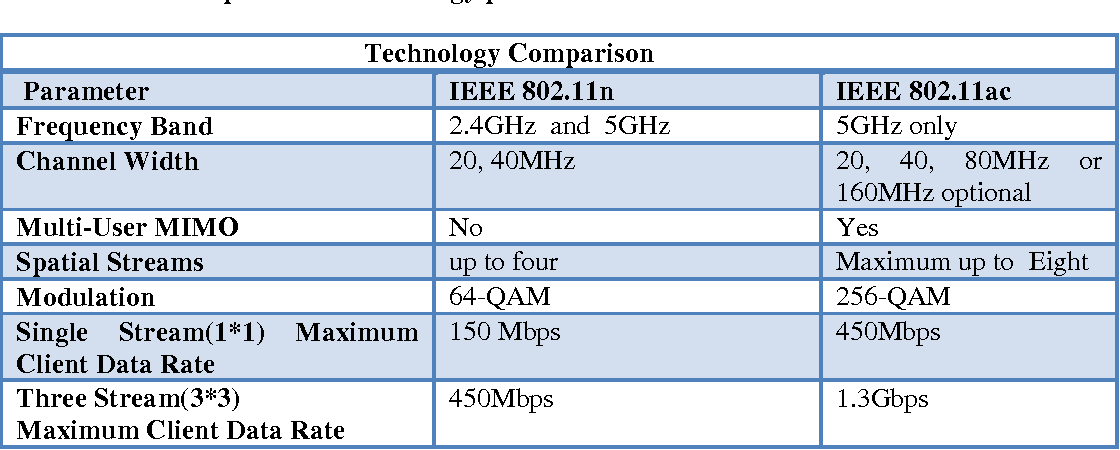
# 摘要
随着无线网络的广泛部署,WIFI频段干扰已成为影响网络性能和用户体验的重要问题。本文从WIFI频段干扰的基础知识出发,深入探讨了干扰的原因和机制,以及干扰对网络性能和用户体验的具体影响。在此基础上,本文详细介绍了IQ2010 WIFI频段干扰解决方案的理论基础、工作原理、优势分析,并讨论了该方案在实践应用中的安装配置、性能测试和进阶应用。通过对IQ201
技术文档背后的逻辑:BOP2_BA20_022016_zh_zh-CHS.pdf深度解读

# 摘要
技术文档作为信息技术领域的基石,在信息交流、知识传承与专业技能传播中扮演着至关重要的角色。本文深入探讨了技术文档的重要性与作用,以及如何通过分析文档结构来有效地提取和理解其中的信息。通过研究文档编写前的准备工作、写作技巧及视觉辅助的运用,以及格式与排版设计对信息传达效率的影响,我们提出了提升技术文档编
【SEO优化策略】:提升花店网页在搜索引擎的排名

# 摘要
本文全面介绍了搜索引擎优化(SEO)的基础知识、关键词研究、内容创作、技术SEO实施以及SEO策略的监控与调整。首先,章节一为读者提供了SEO优化的基本概念。随后,章节二深入探讨了关键词的选择、布局和效果分析,强调了长尾关键
ADS1256在STM32上的性能优化:提升数据采集效率的关键
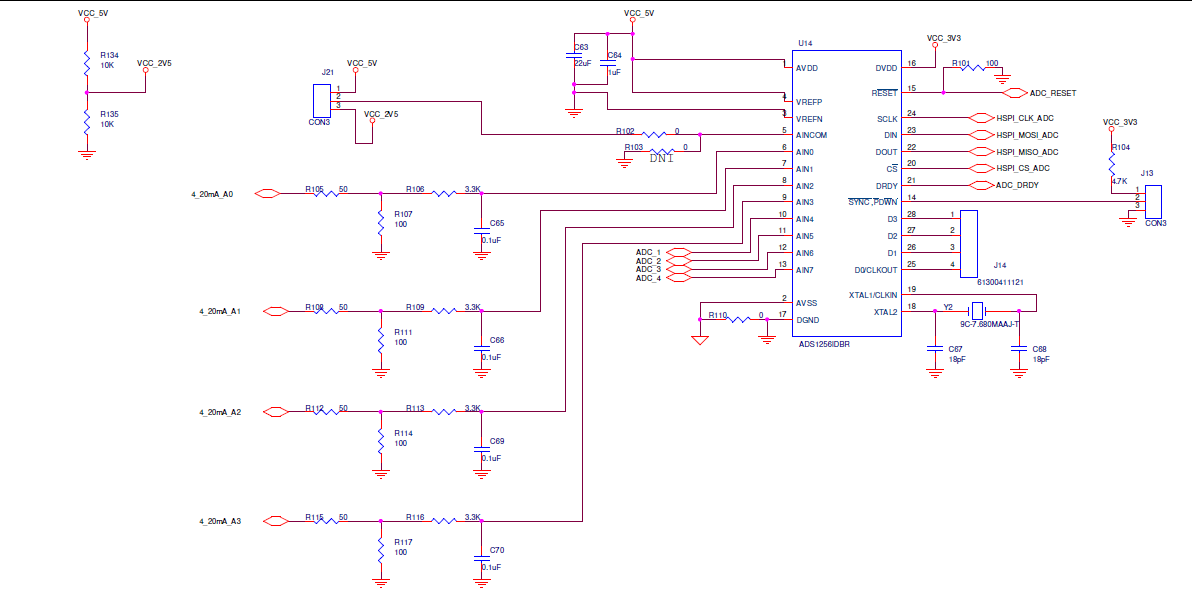
# 摘要
本文对ADS1256在STM32平台上的应用及其性能优化进行了详细探讨。首先介绍了ADS1256与STM32的基础知识,包括硬件连接和初始化步骤,以及基本数据读取与处理方法。随后,论文深入分析了性能瓶颈的理论基础,探讨了性能优化的策略,如缓存和中断处理的优化,以及性能测试的实施与
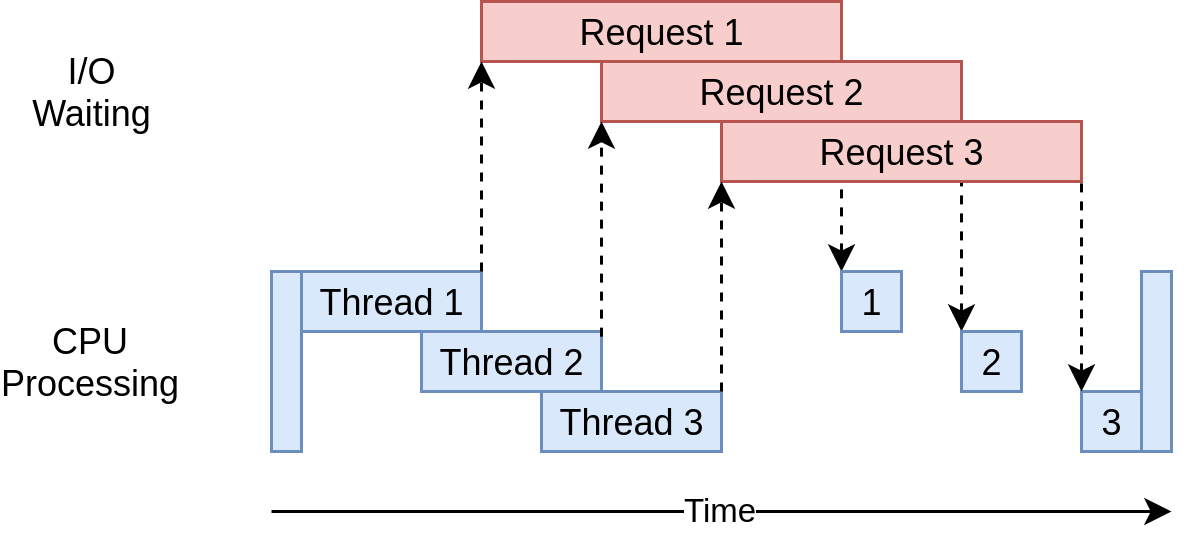
【提升S7-200 SMART采集效率】:Kepware数据处理高级技巧揭秘
# 摘要
本论文系统地介绍了Kepware在S7-200 SMART应用中的实践,涵盖了数据采集、配置、性能优化及故障排除等方面。首先,文章概述了Kepware与S7-200 SMART的连接配置,包括硬件接口、通信协议选择和驱动安装。接着,重点探讨了数据模型、点管理、同步机制以及如何通过性能监控、数据请求优化和缓存策略来提升数据采集效率。在高级数据处理方面,论文详细阐述了结构化数据的映射、解析技术及事件驱动采集的策略。最后,本文提供了系统稳定性维护的策略,并通过行业案例分析展望了Kepware技术的未来发展趋势。
# 关键字
Kepware;S7-200 SMART;数据采集;性能优化;故
存储效率倍增术:IBM M5210阵列性能优化的5大策略
# 摘要
随着企业数据量的不断增长,对存储系统性能的要求也日益提高。本文首先概述了IBM M5210存储阵列的功能与特点,随后介绍了性能优化的理论基础,并对存储性能关键指标进行了详细解析。本文进一步深入探讨了存储系统架构优化原则,包括RAID配置、存储池设计、缓存优化等方面的策略和影响。在实践中,对IBM M5210通过硬件升级、软件调整、系统监控和故障诊断等手段进行性能调优,并通过多个案例分析,展示了在
【水晶报表自定义公式详解】:报告灵活性提升的秘密
# 摘要
水晶报表是企业级数据可视化的重要工具,能够通过自定义公式实现复杂的数据处理与展示。本文首先介绍了水晶报表的基本概念与功能,然后详细阐述了自定义公式的理论基础,包括其定义、结构、逻辑与比较运算以及数学和字符串函数的使用。进阶部分,文章探讨了高级应用,如处理复杂数据类型、创建和使用自定义函数,以及错误处理与调试技巧。通过实践案例分析,本文展示了公式的实际应用,如需求分析转换、数据汇总和性能
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )