离散控制系统设计与分析
发布时间: 2024-03-02 07:59:47 阅读量: 30 订阅数: 44 
# 1. 离散控制系统概述
离散控制系统是指在离散时间点上采取控制动作的系统。本章将介绍离散控制系统的基本概念、应用领域以及与连续控制系统的区别。
## 1.1 离散控制系统基本概念
离散控制系统是以离散的方式来调节系统状态或输出的控制系统。其特点是控制信号在时间上是间断的,而不是连续的。离散控制系统通常通过采样和量化来获取系统状态信息,并在离散时间点上对系统进行控制。
## 1.2 离散控制系统的应用领域
离散控制系统在工业自动化、电子设备、航天航空等领域广泛应用。例如,在工业生产线上,离散控制系统可以实现对生产过程的精确控制和调节。
## 1.3 离散控制系统与连续控制系统的区别
离散控制系统与连续控制系统相比,具有采样、量化和数字计算等特点。离散控制系统对信号的处理更加精细和可控,适用于需要高精度和快速响应的控制场景。而连续控制系统则更适用于要求平滑性和连续性的控制任务。
以上是第一章的内容,接下来将继续深入探讨离散控制系统的数学建模。
# 2. 离散控制系统的数学建模
离散控制系统的数学建模是设计和分析离散控制系统的基础,它通过数学模型来描述系统的行为和特性。在离散控制系统的数学建模中,主要包括离散控制系统的数学表达、离散系统的传递函数和离散系统的状态空间表示。
### 2.1 离散控制系统的数学表达
离散控制系统的数学表达通常通过差分方程或差分方程组来描述系统输入和输出之间的关系。其中,一阶离散系统的数学表达可以表示为:
```python
# 一阶离散系统的数学表达
def first_order_system(input_signal, time_constant, sampling_time):
output_signal = [0]
for i in range(1, len(input_signal)):
output_signal.append((1 - sampling_time/time_constant) * output_signal[i-1] + (sampling_time/time_constant) * input_signal[i])
return output_signal
```
在上面的代码中,我们通过差分方程模拟了一阶离散系统的数学表达,其中输入信号经过采样后得到输出信号。
### 2.2 离散系统的传递函数
离散系统的传递函数是描述系统输入和输出之间关系的另一种数学工具。一般形式的离散系统传递函数可以表示为:
G(z) = \frac{Y(z)}{U(z)} = \frac{b_0z^M + b_1z^{M-1} + ... + b_M}{z^N + a_1z^{N-1} + ... + a_N}
其中,$M$和$N$分别为分子和分母的阶次,$b_i$和$a_i$为传递函数的系数。
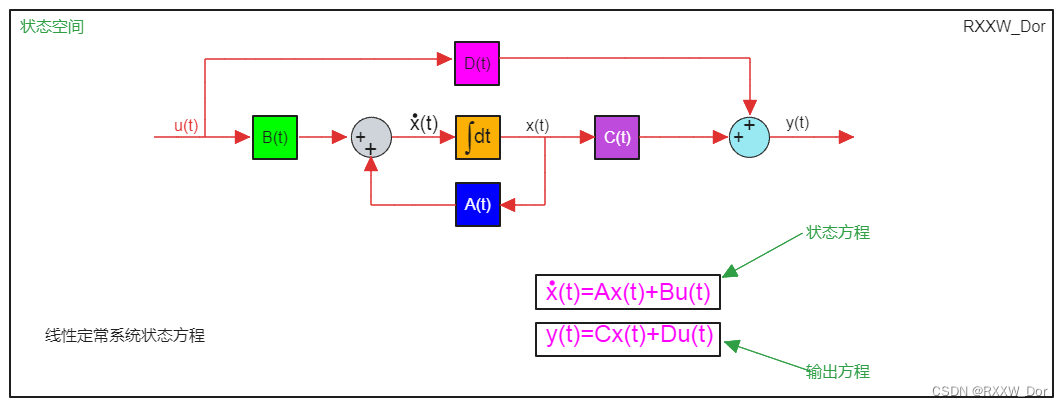
### 2.3 离散系统的状态空间表示
离散系统的状态空间表示是另一种描述系统动态特性的数学模型,通常表示为:
x(k+1) = Ax(k) + Bu(k) \\
y(k) = Cx(k) + Du(k)
其中,$x(k)$表示系统状态向量,$u(k)$表示输入向量,$y(k)$表示输出向量,$A$、$B$、$C$和$D$分别为系统的状态、输入、输出矩阵。状态空间表示可以方便地进行状态反馈控制和观测器设计。
通过对离散控制系统的数学建模,我们可以更好地理解系统的运行机理和特性,为系统设计和分析提供有效的数学工具和理论支持。
# 3. 离散控制系统的设计原理
离散控制系统的设计原理主要包括离散控制器的设计方法、采样和保持器的设计以及数字控制器的设计思路。在本章中,我们将详细介绍离散控制系统的设计原理及相关内容。
#### 3.1 离散控制器的设计方法
离散控制器的设计方法包

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
WINCC与操作系统版本兼容性:专家分析与实用指南
参考资源链接:[Windows XP下安装WINCC V6.0/V6.2错误解决方案](https://wenku.csdn.net/doc/6412b6dcbe7fbd1778d483df?spm=1055.2635.3001.10343)
# 1. WinCC与操作系统兼容性的基础了解
## 1.1 软件与操作系统兼容性的重要性
在工业自动化领域,Win
硬盘SMART指标与性能退化:关联性分析的深度解读
参考资源链接:[硬盘SMART错误警告解决办法与诊断技巧](https://wenku.csdn.net/doc/7cskgjiy20?spm=1055.2635.3001.10343)
# 1. 硬盘SMART技术概述
硬盘作为存储设备的关键组成部分,其健康状态对于数据的安全性和系统的稳定性至关重要。SMART(自监测、分析与报告技术)是用于硬盘监控其自身健康状况的一种技术,它能够提前预警可能发生
【高级控制算法】:提高FANUC 0i-MF系统精度的算法优化,技术解析
参考资源链接:[FANUC 0i-MF 加工中心系统操作与安全指南](https://wenku.csdn.net/doc/6401ac08cce7214c316ea60a?spm=1055.2635.3001.10343)
# 1. ```
# 第一章:FANUC 0i-MF系统与控制算法概述
FANUC 0i-MF系统作为现代工业自动化领域的重要组成部分,以其卓越的控制性能和可靠性在数控机床等领域得到广泛应用。本章将从系统架构、控制算法类型
STM32F103VET6微控制器启动流程:原理图解读全攻略
参考资源链接:[STM32F103VET6 PCB原理详解:最小系统板与电路布局](https://wenku.csdn.net/doc/6412b795be7fbd1778d4ad36?spm=1055.2635.3001.10343)
# 1. STM32F103VET6微控制器概述
STM32F103VET6微控制器,基于ARM Cortex-M3核心,是ST公司生产的一款中等性能的32位微控制器。以其高效的性能、灵活的配置选项以及丰富的外设,广泛应用于工业控制、医疗设备、消费类电子等众多领域。这款MCU拥有64 KB的闪存、20 KB的SRAM以及丰富的通信接口,如I2C、SPI、U
电动汽车充电效率提升:SAE J1772标准实施难点的解决方案

参考资源链接:[SAE J1772-2017.pdf](https://wenku.csdn.net/doc/6412b74abe7fbd1778d
【自动编译的陷阱】:IDEA编译问题不再有的解决方案

参考资源链接:[IDEA 开启自动编译设置步骤](https://wenku.csdn.net/doc/646ec8d7d12cbe7ec3f0b643?spm=1055.2635.3001.10343)
# 1. 自动编译概念与重要性
在软件开发中,自动编译是指使用特定的工具或脚本,自动化完成源代码编译过程的活动。自动编译能有效提高开发效率和准确性,减少人
【FANUC机器人高级应用】:自定义协议与性能优化的专家建议

参考资源链接:[FANUC机器人TCP/IP通信设置手册](https://wenku.csdn.net/doc/6401acf8cce7214c316edd05?spm=1055.2635.3001.10343)
# 1. FANUC机器人自定义协议概述
## 1.1 自定义协议的基本概念
FANUC机器
【ASP.NET Core Web API设计】:构建RESTful服务的最佳实践

参考资源链接:[ASP.NET实用开发:课后习题详解与答案](https://wenku.csdn.net/doc/649e3a1550e8173efdb59dbe?spm=1055.2635.3001.10343)
# 1. ASP.NET
iSecure Center审计功能:合规性监控与审计报告完全解析

参考资源链接:[iSecure Center 安装指南:综合安防管理平台部署步骤](https://wenku.csdn.net/doc/2f6bn25sjv?spm=1055.2635.3001.10343)
# 1. iSecure Center审计功能概述
## 1.1 了解iSecure Center
iSecure Center是一个高效的审计和合规性
【PFC5.0高可用性架构设计】:保障业务连续性的策略与技巧

参考资源链接:[PFC5.0用户手册:入门与教程](https://wenku.csdn.net/doc/557hjg39sn?spm=1055.2635.3001.10343)
# 1. PFC5.0高可用性架构概述
PFC5.0高可用性架构作为企业级解决方案的最新突破,旨在为企业提供不间断的业务运行和数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )