飞行器控制系统设计与优化
发布时间: 2024-03-02 08:08:53 阅读量: 55 订阅数: 44 
# 1. 飞行器控制系统概述
飞行器控制系统作为飞行器的关键组成部分之一,在飞行器的安全性、稳定性和性能方面起着至关重要的作用。本章将从飞行器控制系统的基本原理、组成与功能以及发展历史三个方面进行详细介绍。让我们一起来深入了解飞行器控制系统的概述。
## 1.1 飞行器控制系统的基本原理
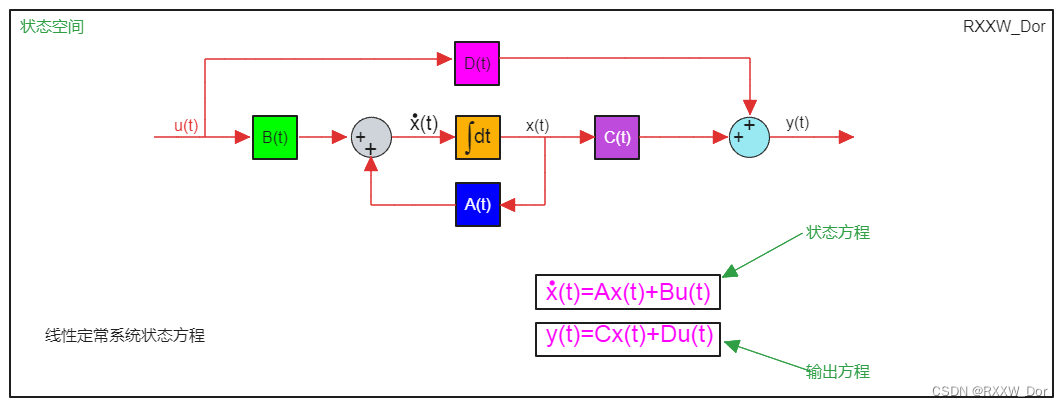
飞行器控制系统的基本原理是通过感知飞行器当前的状态,分析比较期望状态与实际状态之间的差异,然后结合控制算法输出控制指令,以调整飞行器的姿态、速度和位置,从而实现飞行器的稳定飞行和目标导航。
控制系统的基本原理可以归纳为:感知-比较-控制。即飞行器通过传感器感知环境和自身状态,将感知到的信息与期望状态进行比较,计算出误差信号,再通过控制算法处理误差信号,输出控制指令,驱动执行机构实现飞行器的动态调整。
## 1.2 控制系统的组成与功能
飞行器控制系统通常由传感器、执行器、控制器和接口组成。其中,传感器可获取飞行器的姿态、速度、位置等状态信息;执行器负责根据控制指令调整飞行器的姿态和动力;控制器则包括控制算法和逻辑,实现控制逻辑的运算与决策;而接口则负责传递信息或指令,实现各组件之间的通信与协调。
控制系统的主要功能包括姿态控制、稳定性控制、导航控制等,通过控制飞行器的姿态、运动状态和飞行路径,实现飞行器在空中的精准操控和飞行任务的完成。
## 1.3 飞行器控制系统的发展历史回顾
飞行器控制系统的发展经历了从手动操控到自动化控制的演进过程。早期的飞行器需要飞行员通过操纵杆和脚蹬来手动控制飞行器的姿态和飞行方向,而随着自动控制技术的不断发展,飞行器控制系统逐渐实现了自动化和智能化,提高了飞行器飞行的安全性和效率。
在飞行器控制系统的发展历史中,不断引入新的传感器技术、控制算法和通信技术,使得飞行器能够更加智能化、自主化地完成各种复杂飞行任务,为飞行器的未来发展奠定了坚实的基础。
# 2. 飞行器控制系统设计原理
在飞行器控制系统的设计过程中,设计原理至关重要。本章将介绍控制系统的设计思路与方法、飞行器控制系统的设计需求分析以及控制系统硬件与软件的选择与设计原则。
### 2.1 控制系统的设计思路与方法
在设计飞行器控制系统时,首先需要明确飞行器的控制目标和性能指标,确定控制系统的类型(如开环控制、闭环控制),然后选择合适的控制算法(如PID控制器、模糊控制器、神经网络控制器等)。接着,进行系统建模与仿真,验证控制系统设计的可行性,并不断优化设计方案。
```python
# 以PID控制器为例的控制系统设计思路
class PIDController:
def __init__(self, Kp, Ki, Kd):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.prev_error = 0
self.integral = 0
def update(self, error, dt):
self.integral += error * dt
derivative = (error - self.prev_error) / dt
output = self.Kp * error + self.Ki * self.integral + self.Kd * derivative
self.prev_error = error
return output
```
**代码总结:**
通过PID控制器的设计思路,可以实现对飞行器姿态、位置等参数的精确控制。根据实际情况调节PID参数,可以使控制系统快速收敛并保持稳定。
### 2.2 飞行器控制系统的设计需求分析
飞行器的控制系统设计需求分析包括对飞行器性能要求、工作环境条件、系统响应速度等方面的考量。不同类型的飞行器(如固定翼飞行器、多旋翼飞行器)对控制系统的设计需求有所不同,需要结合实际情况进行分析。
```java
// 以多旋翼飞行器为例的设计需求分析
public class MulticopterControlSystem {
private int numMotors;
private boolean hasGPS;
private int maxAltitude;
public MulticopterControlSystem(int numMotors, boolean hasGPS, int maxAltitude) {
this.numMotors = numMotors;
this.hasGPS = hasGPS;
this.maxAltitude = maxAltitude;
}
public void analyzeRequirements() {
System.out.println("Number of motors: " + numMotors);
System.out.println("GPS module: " + (hasGPS ? "Yes" : "No"));
System.out.println("Maximum altitude: " + maxAltitude + " meters");
}
}
```
**代码总结:**
根据多旋翼飞行器的设计需求,可以确定控制系统所需的功能模块和性能指标,为接下来的设计提供基础。
### 2.3 控制系统硬件与软件的选择与设计原则
在选择控制系统的硬件(如传感器、执行器)和软件(如控制算法、通信协议)时,需要考虑稳定性、实时性、可靠性等因素。合理选择硬件设备,并进行软件设计与编码,保证控制系统的稳定运行。
```go
// 选择硬件与进行软件设计的原则示例
// 传感器选择原则
func chooseSensor(sensorType string) string {
if sensorType == "IM
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PFC5.0数据流分析】:深入理解数据处理过程的完整指南

参考资源链接:[PFC5.0用户手册:入门与教程](https://wenku.csdn.net/doc/557hjg39sn?sp
电动汽车充电效率提升:SAE J1772标准实施难点的解决方案

参考资源链接:[SAE J1772-2017.pdf](https://wenku.csdn.net/doc/6412b74abe7fbd1778d
【ASP.NET Core Web API设计】:构建RESTful服务的最佳实践

参考资源链接:[ASP.NET实用开发:课后习题详解与答案](https://wenku.csdn.net/doc/649e3a1550e8173efdb59dbe?spm=1055.2635.3001.10343)
# 1. ASP.NET
【高级控制算法】:提高FANUC 0i-MF系统精度的算法优化,技术解析
参考资源链接:[FANUC 0i-MF 加工中心系统操作与安全指南](https://wenku.csdn.net/doc/6401ac08cce7214c316ea60a?spm=1055.2635.3001.10343)
# 1. ```
# 第一章:FANUC 0i-MF系统与控制算法概述
FANUC 0i-MF系统作为现代工业自动化领域的重要组成部分,以其卓越的控制性能和可靠性在数控机床等领域得到广泛应用。本章将从系统架构、控制算法类型
iSecure Center审计功能:合规性监控与审计报告完全解析

参考资源链接:[iSecure Center 安装指南:综合安防管理平台部署步骤](https://wenku.csdn.net/doc/2f6bn25sjv?spm=1055.2635.3001.10343)
# 1. iSecure Center审计功能概述
## 1.1 了解iSecure Center
iSecure Center是一个高效的审计和合规性
硬盘SMART故障处理:从警告到数据恢复的全过程
参考资源链接:[硬盘SMART错误警告解决办法与诊断技巧](https://wenku.csdn.net/doc/7cskgjiy20?spm=1055.2635.3001.10343)
# 1. 硬盘SMART技术概述
硬盘自监测、分析和报告技术(SMART)是用于监控硬盘健康状况的一种方法,旨在提前预警潜在的硬盘
避免IDEA编译卡顿:打开自动编译的正确方式
参考资源链接:[IDEA 开启自动编译设置步骤](https://wenku.csdn.net/doc/646ec8d7d12cbe7ec3f0b643?spm=1055.2635.3001.10343)
# 1. 自动编译在IDEA中的重要性
自动编译功能是现代集成开发环境(IDE)中不可或缺的一部分,特别是在Java开发中,IntelliJ
WINCC与操作系统版本兼容性:专家分析与实用指南
参考资源链接:[Windows XP下安装WINCC V6.0/V6.2错误解决方案](https://wenku.csdn.net/doc/6412b6dcbe7fbd1778d483df?spm=1055.2635.3001.10343)
# 1. WinCC与操作系统兼容性的基础了解
## 1.1 软件与操作系统兼容性的重要性
在工业自动化领域,Win
STM32F103VET6外围设备接口设计:原理图要点揭秘

参考资源链接:[STM32F103VET6 PCB原理详解:最小系统板与电路布局](https://wenku.csdn.net/doc/6412b795be7fbd1778d4ad36?spm=1055.2635.3001.10343)
# 1. STM32F103VET6简介与外围设备概述
## 1.1 STM32F103VET6概述
STM32F103VE
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )