STM32单片机小车项目实战:打造你的专属智能小车,释放你的创造力
发布时间: 2024-07-05 09:41:14 阅读量: 76 订阅数: 33 
# 1. STM32单片机小车项目简介**
本项目旨在设计和开发一款基于STM32单片机的智能小车。该小车将具备蓝牙通信、遥控控制、避障功能和路径规划能力。通过本项目,读者将深入了解STM32单片机的硬件设计、软件开发、控制和调试等方面的知识。
本项目的目标是创建一个具有以下特点的小车:
- 蓝牙通信:通过蓝牙与外部设备(如智能手机)进行无线通信。
- 遥控控制:使用遥控器远程控制小车的运动。
- 避障功能:使用传感器检测障碍物并自动避开。
- 路径规划:根据给定的路径点自动导航小车。
# 2. STM32单片机小车硬件设计
### 2.1 电路原理图设计
电路原理图是硬件设计的核心,它描述了小车各模块之间的连接关系和工作原理。设计时需要考虑以下因素:
- **电源模块:**为小车提供稳定的电压和电流,通常使用锂电池或稳压电源。
- **电机驱动模块:**控制小车的电机,实现前进、后退、转向等动作。
- **传感器模块:**感知小车周围环境,如超声波传感器、红外传感器等。
- **通信模块:**实现小车与外部设备(如遥控器、蓝牙模块)的通信。
- **控制模块:**STM32单片机,负责处理数据、控制各模块的工作。
### 2.2 PCB设计
PCB(Printed Circuit Board)是电路原理图的物理实现,它将各元器件连接起来。设计时需要考虑以下因素:
- **元器件布局:**合理安排元器件的位置,保证信号传输顺畅,避免干扰。
- **布线规则:**遵循PCB设计规则,如线宽、间距、走线层数等,保证电路的可靠性。
- **元器件封装:**选择合适的元器件封装,考虑空间限制和散热要求。
### 2.3 元器件选型与焊接
元器件选型直接影响小车的性能和可靠性。需要考虑以下因素:
- **性能参数:**根据小车需求选择合适的元器件,如电机的转速、扭矩,传感器的灵敏度等。
- **可靠性:**选择来自知名厂商的元器件,保证其质量和稳定性。
- **成本:**在满足性能要求的前提下,考虑元器件的成本。
焊接是将元器件连接到PCB上的过程。需要遵循以下步骤:
1. **准备工作:**清洁PCB表面,准备焊锡膏和烙铁。
2. **贴装元器件:**根据PCB布局将元器件贴装到指定位置。
3. **焊接:**使用烙铁将元器件引脚与PCB焊盘焊接连接。
4. **检查:**焊接完成后,仔细检查是否有虚焊、短路等缺陷。
**代码块:**
```c
// 电机驱动代码
void motor_control(int speed, int direction) {
// 设置电机速度
TIM_SetCompare1(TIM3, speed);
// 设置电机方向
if (direction == 1) {
GPIO_SetBits(GPIOA, GPIO_Pin_0);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
} else {
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
}
```
**逻辑分析:**
此代码用于控制小车的电机,`speed`参数设置电机的转速,`direction`参数设置电机的方向(1表示前进,0表示后退)。函数首先设置电机速度,然后根据`direction`参数设置电机方向。
**表格:**
| 元器件 | 型号 | 参数 |
|---|---|---|
| 单片机 | STM32F103C8T6 | 32位ARM Cortex-M3内核 |
| 电机驱动芯片 | L298N | 双路H桥电机驱动 |
| 超声波传感器 | HC-SR04 | 测距范围2cm-400cm |
| 红外传感器 | TCRT500

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以“STM32单片机小车教程”为题,深入探讨了STM32单片机在小车制作中的应用。涵盖了从电机控制、传感器应用、视觉识别、路径规划、故障排除、性能优化到竞赛指南、嵌入式操作系统、云端连接、人工智能应用、机器人技术、深度学习、行业应用等各个方面。专栏内容丰富翔实,既有基础知识讲解,又有实战经验分享,还有专家访谈和资源大全,旨在帮助读者打造智能小车,探索无限可能。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【lxml与数据库交互】:将XML数据无缝集成到数据库中

# 1. lxml库与XML数据解析基础
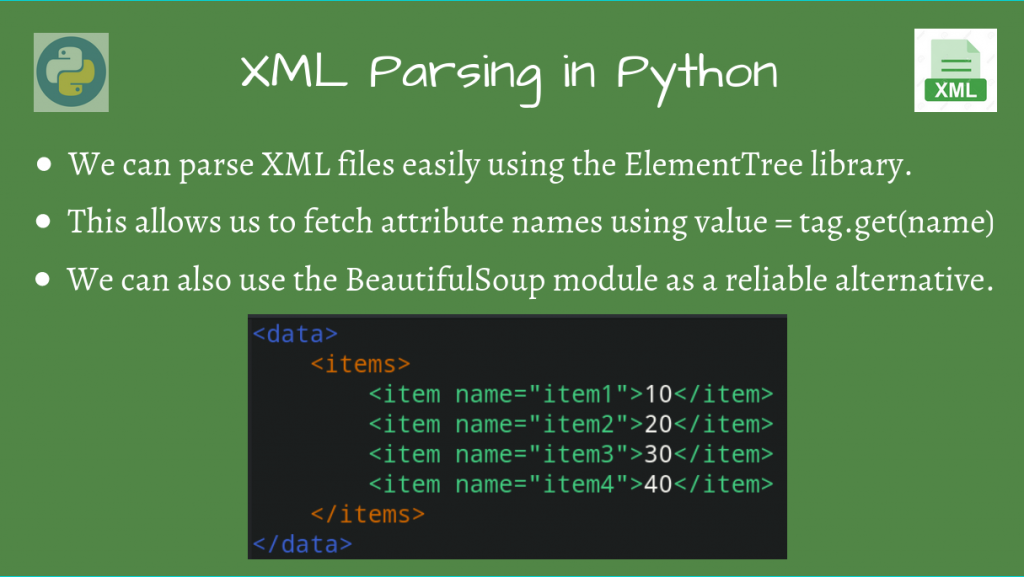
在当今的IT领域,数据处理是开发中的一个重要部分,尤其是在处理各种格式的数据文件时。XML(Extensible Markup Language)作为一种广泛使用的标记语言,其结构化数据在互联网上大量存在。对于数据科学家和开发人员来说,使用一种高效且功能强大的库来解析XML数据显得尤为重要。P
国际化背后的文化艺术:在django.utils.translation中处理文化差异

# 1. 多语言网站的重要性与Django框架概述
在当今全球化的商业环境中,多语言网站变得至关重要。它们不仅可以拓宽市场覆盖面,还能增加潜在客户基础。Python的Django框架,因其“开箱即用”的特性、强大的社区支持和高度可定制的架构,已经成为开发多语言网站的首选工具之一。
Django提供了专门用于国际化的库django.utils.transla
httpie在自动化测试框架中的应用:提升测试效率与覆盖率
# 1. HTTPie简介与安装配置
## 1.1 HTTPie简介
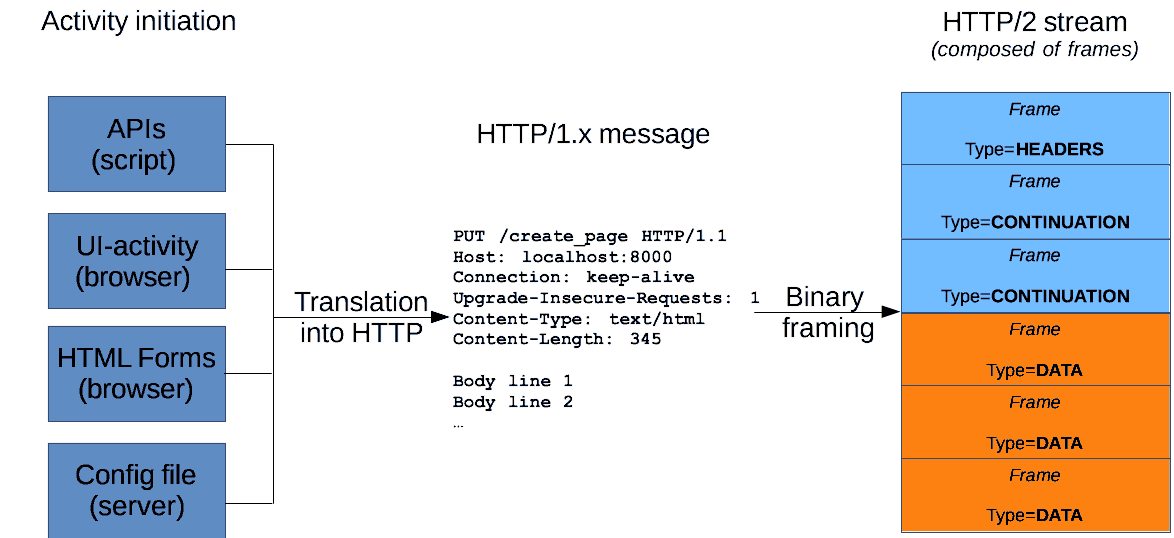
HTTPie是一个用于命令行的HTTP客户端工具,它提供了一种简洁而直观的方式来发送HTTP请求。与传统的`curl`工具相比,HTTPie更易于使用,其输出也更加友好,使得开发者和测试工程师可以更加高效地进行API测试和调试。
## 1.2 安装
【Jupyter高级用法】:构建交互式数据报告和应用的绝技
# 1. Jupyter概述与环境配置
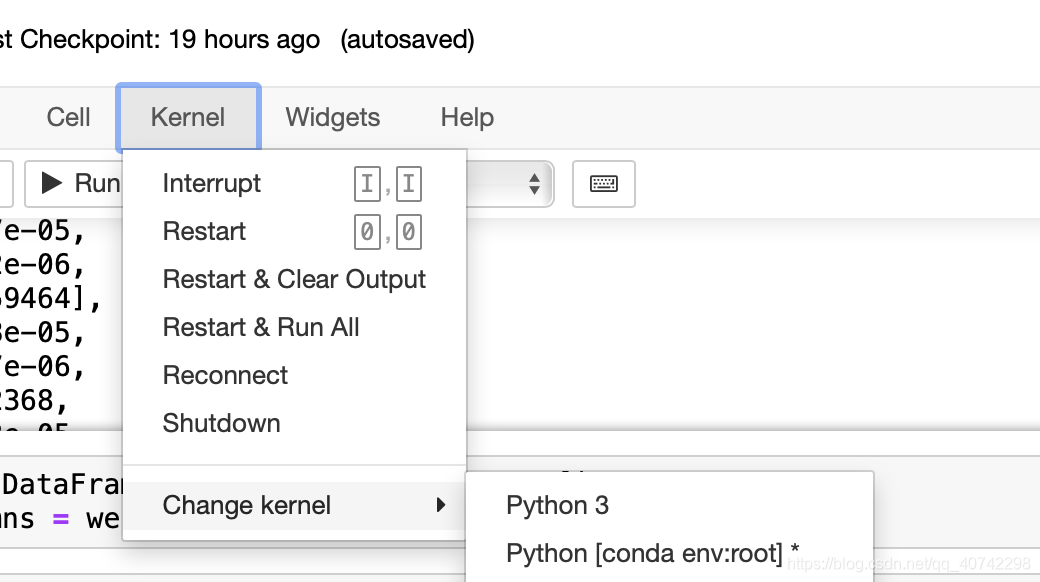
## 1.1 Jupyter项目简介
Jupyter(Julia、Python、R)项目起源于IPython
【XPath高级应用】:在Python中用xml.etree实现高级查询
# 1. XPath与XML基础
XPath是一种在XML文档中查找信息的语言,它提供了一种灵活且强大的方式来选择XML文档中的节点或节点集。XML(Extensible Markup Language)是一种标记语言,用于存储和传输数据。为了在Python中有效地使用XPath,首先需要了解XML文档的结构和XPath的基本语法。
## 1
【自动化测试报告生成】:使用Markdown提高Python测试文档的可读性

# 1. 自动化测试报告生成概述
在软件开发生命周期中,自动化测试报告是衡量软件质量的关键文档之一。它不仅记录了测试活动的详细过程,还能为开发者、测试人员、项目管理者提供重要的决策支持信息。随着软件复杂度的增加,自动化测试报告的作用愈发凸显,它能够快速、准确地提供测试结果,帮助团队成员对软件产品
【App Engine微服务应用】:webapp.util模块在微服务架构中的角色
# 1. 微服务架构基础与App Engine概述
##
【feedparser教育应用】:在教育中培养学生信息技术的先进方法
# 1. feedparser技术概览及教育应用背景
## 1.1 feedparser技术简介
Feedparser是一款用于解析RSS和Atom feeds的Python库,它能够处理不同来源的订阅内容,并将其统一格式化。其强大的解析功能不仅支持多种语言编码,还能够处理各种数据异
requests-html库进阶
# 1. requests-html库简介
在当今信息技术迅猛发展的时代,网络数据的抓取与分析已成为数据科学、网络监控以及自动化测试等领域不可或缺的一环。`requests-html`库应运而生,它是在Python著名的`requests`库基础上发展起来的,专为HTML内容解析和异步页面加载处理设计的工具包。该库允许用户方便地发送HTTP请求,解析HTML文档,并能够处理JavaScript
定制你的用户代理字符串:Mechanize库在Python中的高级使用

# 1. Mechanize库与用户代理字符串概述
## 1.1 用户代理字符串的定义和重要性
用户代理字符串(User-Agent String)是一段向服务器标识客户浏览器特性的文本信息,它包含了浏览器的类型、版本、操作系统等信息。这些信息使得服务器能够识别请
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )