三角剖分实战指南:从数据准备到算法选择
发布时间: 2024-07-04 00:06:19 阅读量: 50 订阅数: 22 

# 1. 三角剖分的理论基础
三角剖分是一种将二维空间中的点集划分为一系列不重叠的三角形的方法。它在计算机图形学、地理信息系统和计算几何等领域有着广泛的应用。
三角剖分的基本概念是将一组点连接起来,形成一系列不重叠的三角形,使得每个三角形内部不包含任何其他点。三角剖分的目的是创建一种数据结构,以便于对点集进行查询和分析。
三角剖分算法有多种,每种算法都有其独特的优势和劣势。最常用的三角剖分算法包括Delaunay三角剖分和Voronoi图。Delaunay三角剖分是一种最大最小角三角剖分,它可以确保生成的三角形具有最大的最小角,从而提高三角剖分的质量。Voronoi图是一种基于距离的三角剖分,它将空间划分为一系列称为Voronoi单元的区域,每个区域都包含到该区域内某个特定点的距离最小的所有点。
# 2. 三角剖分算法
三角剖分算法是一种将点集划分为三角形的技术,广泛应用于地理信息系统、图像处理等领域。本节将介绍两种常用的三角剖分算法:Delaunay三角剖分和Voronoi图。
### 2.1 Delaunay三角剖分
#### 2.1.1 概念和原理
Delaunay三角剖分是一种点集三角剖分算法,其目标是找到一组三角形,使得每个三角形的圆内不包含任何其他点。换句话说,Delaunay三角剖分产生的三角形具有最大的最小角。
#### 2.1.2 算法实现
Delaunay三角剖分的经典算法是Bowyer-Watson算法。该算法从一个凸包三角形开始,逐步添加点并更新三角形,直到所有点都被包含。
```python
def delaunay_triangulation(points):
"""
使用Bowyer-Watson算法计算点集的Delaunay三角剖分。
参数:
points:点集,每个点是一个元组(x, y)。
返回:
三角形列表,每个三角形是一个元组(p1, p2, p3)。
"""
# 初始化凸包三角形
convex_hull = convex_hull(points)
triangles = [convex_hull]
# 逐个添加点
for point in points:
# 找到包含该点的三角形
containing_triangle = find_containing_triangle(point, triangles)
# 创建新的三角形
new_triangles = []
for edge in containing_triangle:
new_triangles.append((point, edge[0], edge[1]))
new_triangles.append((point, edge[1], edge[2]))
# 移除包含该点的三角形
triangles.remove(containing_triangle)
# 添加新的三角形
triangles.extend(new_triangles)
return triangles
```
### 2.2 Voronoi图
#### 2.2.1 概念和原理
Voronoi图是一种将点集划分为区域的算法,每个区域包含一个点,并且该区域内的所有点到该点的距离小于到其他任何点的距离。换句话说,Voronoi图将平面划分为一系列多边形,每个多边形对应一

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
三角剖分专栏深入探讨了三角剖分的核心概念、算法和应用。从基础到高级,专栏涵盖了三角剖分的原理、实现、优化和陷阱。它揭示了三角剖分的数学奥秘,并提供了提升算法性能和鲁棒性的秘籍。专栏还探讨了三角剖分在计算机图形学、有限元分析、计算机视觉、医学成像和航空航天等领域的广泛应用。通过对算法的深入分析和比较,专栏提供了选择和权衡三角剖分算法的指南,帮助读者掌握三角剖分技术,提升模型渲染效率、仿真精度和计算速度。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
XML到JSON的转换秘籍:Python与数据格式转换的艺术
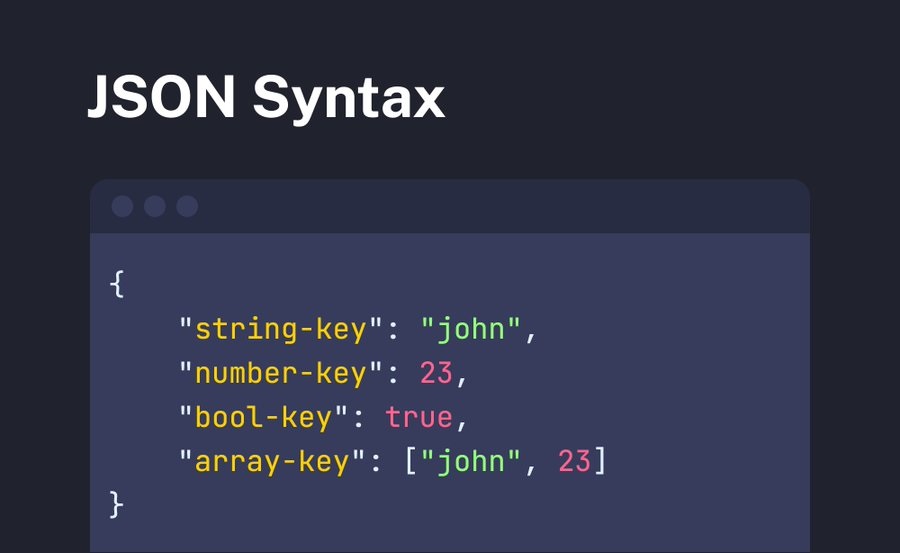
# 1. XML与JSON格式概述
## 1.1 XML与JSON的定义与重要性
可扩展标记语言(XML)和JavaScript对象表示法(JSON)是数据交换领域最常用的两种格式。XML自1998年推出以来,一直是互联网上数据交换的标准之一。它允许用户定义自己的标记,构建复杂的数据结构,并拥有良好的可读性。然而,随着Web 2.0时代的到来,JSON因其轻量级、易于阅读、易于解析的特性逐渐成为Web应用中
Jinja2模板国际化:支持多语言应用的实现方法及技巧
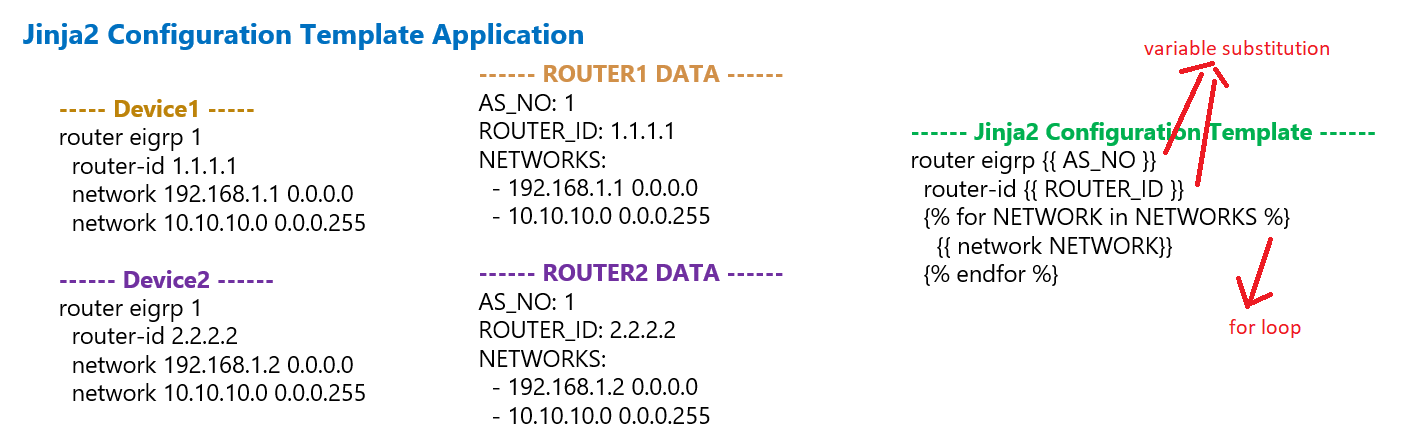
# 1. Jinja2模板国际化概述
Jinja2 是一个广泛使用的 Python 模板引擎,它在 Web 开发领域尤其流行,特别是在 Flask 这样的 Web 框架中。模板国际化是指在保持代码逻辑不变的前提下,将模板中的字符串翻译成不同的语言。对于任何希望其应用程序覆盖全球市场的产品来说,实现国际化是至关重要的一步。
国际化不仅涉及翻译文本,还包括本地化文化
【揭秘pydub内幕】:深入了解pydub库的内部工作机制
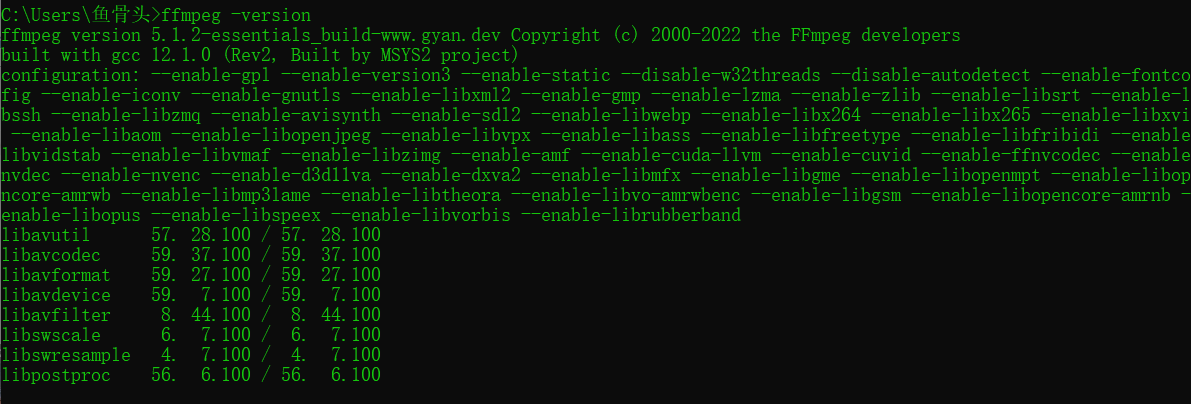
# 1. Pydub库概述与安装
## 1.1 Pydub简介
Pydub是一个简单且高效的音频处理库,它是用Python编写的,允许用户以简单易懂的方式进行音频文件的读取、写入和操作。Pydub极大地简化了音频处理任务,提供了高级接口来处理底层细节,适用于需要快速开发音频处理应用的开发者。
## 1.2 安装Pydub
安装Pydub相对简单,可以直接使用pip安装:
```bash
pip
【imgaug自动化流程】:一键设置,实现图像增强流水线自动化

# 1. imgaug概述与安装配置
## 1.1 imgaug简介
imgaug是一个用于图像增强的Python库,特别适合于数据增强任务,在机器学习和深度学习的训练过程中,对图像数据集进行各种变换,从而提高模型的泛化能力。imgaug广泛应用于计算机视觉领域,尤其是图像识别、分类、检测等任务中。
## 1.2 安装imgaug
安装imgaug非常简单,只需要使用pi
Django REST API设计:基于generics创建RESTful接口的快速指南

# 1. Django REST API设计概述
## 简介
REST(Representational State Transfer)架构风格是一种用于分布式超媒体系统的软件架构风格,由Roy Fielding在其博
【音频处理背后的数学】:Librosa中傅里叶变换的实用指南

# 1. 傅里叶变换基础理论
傅里叶变换是信号处理领域的核心数学工具之一,它将复杂的信号分解为简单的正弦波成分。通过分析这些组成成分,我们可以深入
xml SAX终极指南:如何构建高效XML解析器
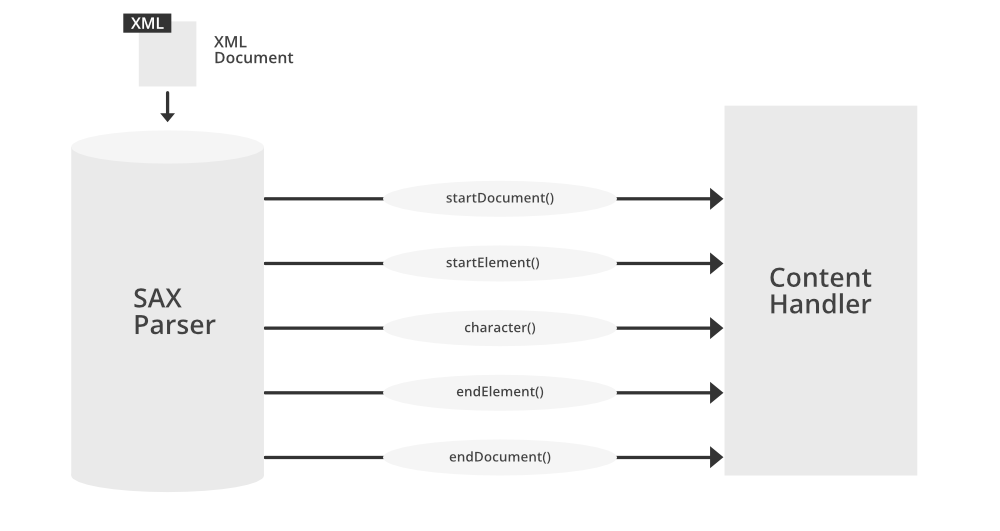
# 1. XML和SAX解析基础
在当今的信息技术世界中,可扩展标记语言(XML)一直是数据交换和存储的关键格式之一。它提供了一种灵活的方式来组织和表示数据,这使得它在多个行业得到了广泛的应用。为了从XML文档中提取信息,解析技术是必不可少的工具。在此过程中,SAX(Simple API for XML)解析器扮演了一个极为重要的角色,因其事件驱动模型而闻名。本章将
线程安全性与函数式编程:django.utils.functional模块的深入探讨
# 1. 线程安全性与函数式编程概述
在现代软件开发中,随着多核处理器的普及和应用程序对高并发处理需求的增加,线程安全性和函数式编程成为了开发者必须掌握的关键技术。线程安全性是指当多个线程访问某个类时,不管运行时序如何,这个类都能保证正确的执行。而函数式编程,作为一种编程范式,强调使用函数来构建软件,并且倡导不可变性和引用透明性。
在
【形态学操作】:scikit-image开闭运算与腐蚀膨胀完全攻略
# 1. 形态学操作基础概述
形态学操作是图像处理中的一类基本技术,主要基于集合论中的形态学概念。在计算机视觉领域,形态学操作用于简化图像的形状,突出特定特征,以及在二值图像中去除噪声。这些操作处理的对象包括二值图像、灰度图像等,通过对图像的结构元素进行操作来实现。
形态学操作的核心可以概括为四个基本操作:腐蚀、膨胀、开运算和闭运算。腐蚀能够消除边界点,使边界向内部收缩;膨胀则相反,它扩展物
【数学形态学】:mahotas图像处理中的原理与应用深度解析

# 1. 数学形态学简介与基本概念
数学形态学是一门用于分析和处理几何结构的学科,尤其在图像处理领域有着广泛的应用。本章首先介绍了数学形态学的起源和
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )