自动驾驶的视觉革命:迁移学习助力图像分类的场景理解
发布时间: 2024-09-03 16:40:51 阅读量: 109 订阅数: 46 

基于纯verilogFPGA的双线性差值视频缩放 功能:利用双线性差值算法,pc端HDMI输入视频缩小或放大,然后再通过HDMI输出显示,可以任意缩放 缩放模块仅含有ddr ip,手写了 ram,f
# 1. 自动驾驶视觉系统概览
在自动驾驶汽车的开发中,视觉系统是其感知周围环境的核心组成部分。它通过一系列的摄像头和传感器,捕捉并解析道路、障碍物、交通标志及行人信息。这些数据经过处理,最终提供给决策系统以辅助驾驶决策。
## 1.1 自动驾驶视觉系统的组成
自动驾驶视觉系统通常包含多种类型的摄像头,它们对不同距离和角度的视觉信息进行采集。此外,它还会集成激光雷达(LIDAR)、毫米波雷达等非视觉感知设备,以提供更为全面的环境数据。
## 1.2 视觉数据的处理流程
从摄像头捕获的图像数据,首先需要经过预处理,例如图像矫正、裁剪等。随后,使用计算机视觉和深度学习技术,比如目标检测和语义分割,将视觉信息转换为结构化的环境描述,供后续模块使用。
## 1.3 视觉系统的挑战与优化
视觉系统在自动驾驶中的表现受到多种因素的影响,如光照条件、天气状况、视觉遮挡等。因此,对视觉系统的优化始终是研究的热点,包括算法的改进、硬件的升级,以及多传感器数据融合技术的发展。
在下一章节,我们将深入探讨迁移学习,这种人工智能领域中的一项关键技术,它如何助力自动驾驶视觉系统的性能提升。
# 2. 迁移学习基础与理论
## 2.1 迁移学习的定义和原理
### 2.1.1 迁移学习的概念框架
迁移学习是机器学习中的一个分支,核心思想在于将一个问题领域中学习到的知识应用到另一个相关领域的问题中。这种学习策略可以极大地减少数据收集和处理的负担,特别是在数据稀缺的领域。在自动驾驶视觉系统中,将迁移学习应用到视觉识别任务中可以加速模型的训练过程,提高识别的准确性。
为了更深入理解迁移学习,我们可以将其概念框架分解为以下几个关键要素:
- **源域(Source Domain)**:包含有大量标注数据的原始学习领域,这些数据常用于训练模型。
- **目标任务(Target Task)**:迁移学习的目标,即需要解决的新问题,可能面临的样本数量有限。
- **领域适应(Domain Adaptation)**:通过调整源域模型,使其适应目标任务的过程。
- **特征表示(Feature Representation)**:在特征空间中,不同任务的分布可以不同,但相同类别数据在特征空间的结构可能存在相似性,这是迁移学习能够发挥作用的基础。
### 2.1.2 迁移学习的理论基础
迁移学习的理论基础主要来源于统计学习理论,特别是关于泛化误差和分布不匹配问题的研究。它建立在以下假设之上:
- **数据分布的相似性**:源域和目标任务的数据分布虽然不完全相同,但在一定程度上是相似的,或者具有一定的共享结构。
- **任务相关性**:源任务和目标任务之间存在某些共性,例如共享了一些特征或者在分类问题中,类别在不同任务间有交集。
这些假设使得从源任务学到的知识能够帮助解决目标任务,例如通过预训练模型提取的特征可以帮助学习目标任务的分类器。
### 2.2 迁移学习的关键技术
#### 2.2.1 特征提取与迁移
特征提取是迁移学习中一个关键步骤,涉及从原始数据中提取有意义的特征,并将这些特征用于目标任务。在自动驾驶视觉系统中,这通常意味着从交通标识、行人、车辆等视觉信息中提取特征。
迁移学习通常采用预训练模型来提取特征。这些模型已经在大数据集上进行了训练,如ImageNet等,并已成功提取了丰富的图像特征。接下来,利用这些特征来训练目标任务分类器,可以有效地加速收敛并提高识别精度。
#### 2.2.2 模型适应与微调
模型适应指的是根据目标任务调整预训练模型的参数。这通常意味着不仅要更换输出层,而且可能要对整个模型或其部分进行微调。微调时,通常使用目标任务的数据来进一步训练模型,这个过程中学习率较低,以避免破坏先前学到的通用特征。
#### 2.2.3 正则化策略与领域自适应
正则化策略在迁移学习中用于防止过拟合,并确保模型在源任务和目标任务之间能够平滑地适应。常用的正则化技术包括L1、L2正则化,dropout以及结构化正则化。
领域自适应是处理源域和目标任务领域分布差异的一种技术。它通过算法调整特征表示,使得源域和目标任务具有更相似的分布。例如,对抗训练可以帮助模型学会识别在源域和目标任务中具有不同分布的特征。
### 2.3 迁移学习在视觉识别中的应用
#### 2.3.1 预训练模型在视觉任务中的作用
在视觉识别任务中,预训练模型起到了基础性的作用。通过在大型数据集上预训练,模型可以学会提取图像中的通用特征,如边缘、角点、纹理等。这些特征对于后续视觉任务来说是极其宝贵的,因为它们是区分不同视觉对象的关键。
以自动驾驶视觉系统为例,使用预训练模型,例如VGG、ResNet或Inception等,可以有效地提取车辆、行人、交通标识等元素的特征。这些特征在迁移至自动驾驶的视觉任务时,为准确识别这些元素提供了基础。
#### 2.3.2 案例分析:迁移学习在图像分类中的效能
以一个典型的图像分类案例来说明迁移学习的效能。假设任务是区分不同类型的车辆,如果从零开始训练一个深度学习模型,可能需要大量的标注数据和长时间的训练过程。然而,如果使用一个在ImageNet数据集上预训练的模型,并针对特定的车辆分类任务进行微调,我们通常可以显著减少训练数据的需求并加快训练速度。
为了展示迁移学习在此类任务中的效能,我们可以进行一个实验,其中模型首先在ImageNet上进行预训练,然后在一个包含不同类型车辆的较小子集上进行微调。实验结果表明,迁移学习不仅减少了训练时间,还提高了模型的分类准确度。
在进行这个实验时,我们注意到几个关键步骤:
- 选择一个适合初始任务的预训练模型。
- 根据目标任务调整模型架构,这可能包括更换最后一层的神经元数量以匹配分类数量。
- 使用目标任务的数据集进行微调。这可能需要调整学习率和训练的epoch数量,以避免过拟合。
- 使用验证集评估模型性能,从而找到最佳的微调配置。
实验结果可以使用混淆矩阵、精确度、召回率等指标进行量化评估。这些指标可以帮助我们了解模型在各个类别的表现,并确定是否有类别的识别需要进一步优化。
通过上述实验与分析,我们看到迁移学习不仅缩短了开发时间,还在提高模型性能方面发挥了重要作用。这使得迁移学习成为自动驾驶视觉系统中不可或缺的技术之一。
# 3. 迁移学习在图像分类中的实践应用
迁移学习已经成为图像分类任务中不可或缺的一部分,它通过利用在大规模数据集上预训练的模型来提升在特定数据集上的性能。本章将深入探讨如何在图像分类任务中实际应用迁移学习,并且会提供实战演练的案例分析。
## 3.1 深度学习框架与迁移学习工具
在深度学习框架如TensorFlow和PyTorch中,开发者可以方便地使用迁移学习工具,这些框架都提供了丰富的API来处理预训练模型。接下来的两个子章节,我们将详细探讨在TensorFlow和PyTorch中迁移学习接口的使用方法以及如何选择和使用预训练模型。
### 3.1.1 TensorFlow和PyTorch中的迁移学习接口
在TensorFlow中,`tf.keras.applications`模块提供了多个预训练模型,如VGG16、ResNet、Inception等。这些模型可以直接用于迁移学习任务,用户可以通过加载模型并替换顶层来进行微调。
```python
import tensorflow as tf
from tensorflow.keras.applications import VGG16
from tensorflow.keras.layers import Dense, Flatten
from tensorflow.keras.models import Model
# 加载VGG16模型,设定include_top=False来排除顶层
base_model = VGG16(include_top=False, weights='imagenet', input_shape=(224, 224, 3))
# 向模型添加新的顶层,为分类任务做准备
x = Flatten()(base_model.output)
x = Dense(1024, activation='relu')(x)
predictions = Dense(10, activation='softmax')(x)
# 构建新模型
model = Model(inputs=base_model.input, outputs=predictions)
# 冻结所有卷积层
for layer in base_model.layers:
layer.trainable = False
# 编译新模型
*
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了迁移学习在图像分类中的应用,提供了全面而实用的指南。通过11个技巧,读者可以提高图像分类模型的准确率。专栏涵盖了迁移学习的优势、理论基础、最佳实践、挑战和应对策略,以及调优技巧。此外,还介绍了迁移学习与数据增强、领域自适应、特征对齐和深度学习相结合的应用。专栏深入分析了 TensorFlow 和 PyTorch 在迁移学习中的作用,并提供了医疗图像分析、自动驾驶和遥感图像分析等领域的实际应用。通过本专栏,读者将获得图像分类中迁移学习的全面知识,并掌握提升模型性能的实用技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
整合系统与平台:SCM信道集成挑战解决方案

# 摘要
供应链管理(SCM)信道集成是实现供应链优化的关键环节。本文从理论基础入手,详细阐述了SCM系统的组成、功能及信道集成的作用,分析了技术、组织、流程和数据集成方面的挑战与解决方案。随后,文章探讨了实现SCM信道集成的技术实践,包括系统接口、数据交换同步机制以及多系统集成的策略。进一步,高级技术与创新一章,研究了物联网、人工智能、机器学
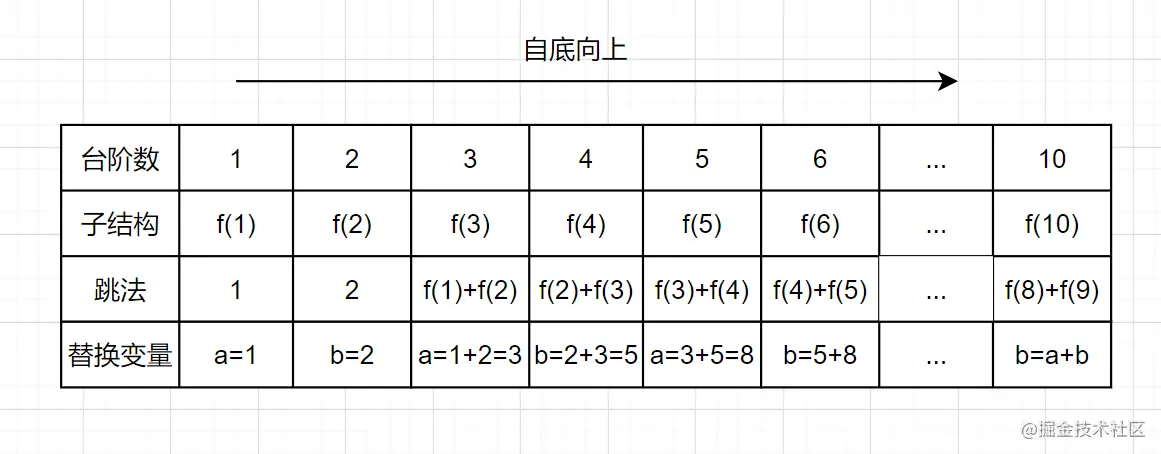
动态规划深度解析:购物问题的算法原理与实战技巧
# 摘要
动态规划算法是一种通过将问题分解为更小的子问题来求解复杂问题的方法,广泛应用于计算机科学和工程学领域。本文首先介绍了动态规划的基本概念和理论基础,探讨了其数学原理、与贪心算法和分治算法的比较,以及时间复杂度和空间复杂度的分析。随后,文章深入分析了购物问题作为动态规划模型的实际应用,包括问题类型、状态定义、求解策略
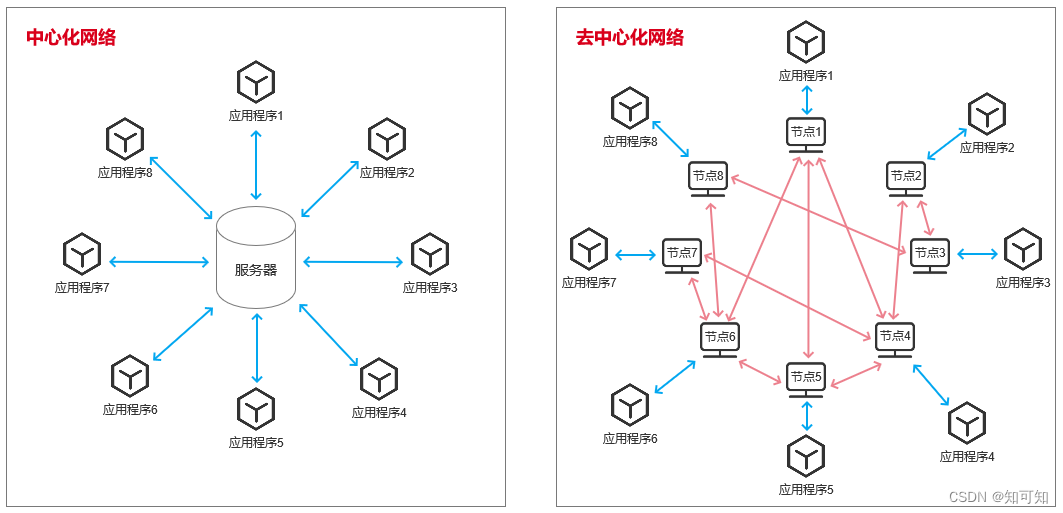
Tosmana在大型网络中的部署战略:有效应对规模挑战
# 摘要
本文全面介绍并分析了Tosmana网络分析工具的功能及其在大型网络环境中的应用。第一章对Tosmana进行概述,阐述了其在不同规模网络中的应用价值。第二章深入探讨了网络规模评估的理论基础,分析了大型网络面临的数据量激增、拓扑复杂性和安全监控等挑战,提出了相应的应对策略。第三章详细说明了Tosmana在大型网络部署的策略,包括准备工作、不同场景下的部署案例以及部署后的管理与维护。
S32K SPI编程101:从基础入门到高级应用的完整指南

# 摘要
本文全面介绍了S32K系列微控制器中的SPI(串行外设接口)模块的基础知识、硬件连接与初始化、编程基础、高级特性和项目实战案例。通过对S32K SPI的详细介绍,本文旨在为开发者提供深入理解SPI协议及实现高效、稳定通信的方法。内容涵盖了SPI的协议概述、数据传输模式、中断和轮询机制、DMA传输技术、多从设备管理和性能优化策略。实战案例部分则着重讨论了SPI在实时数据采集系统、无线通信模块集成以及复杂传感
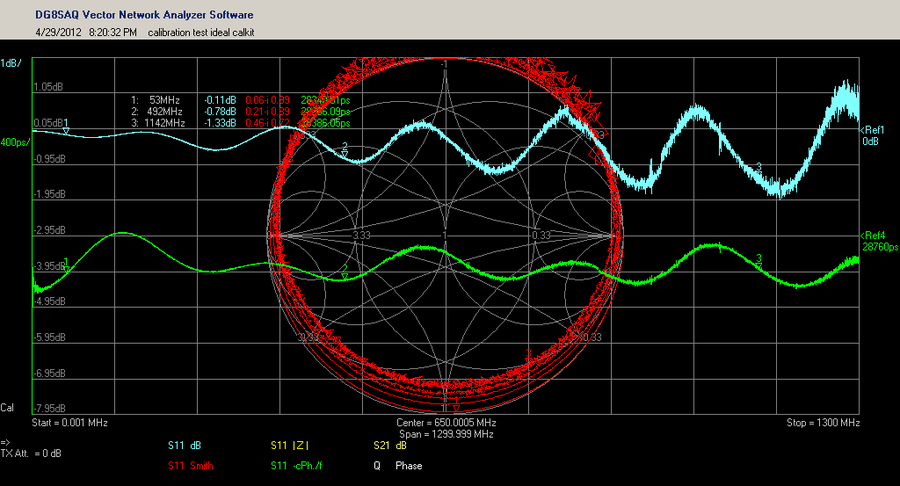
【QSPr调试技巧揭秘】:提升过冲仿真精度的专业方法
# 摘要
本文系统地探讨了QSPr调试技术,从基本概念出发,详细分析了提高仿真精度的理论基础、实践操作以及高级调试技巧。文章深入讨论了信号完整性问题,过冲现象对信号质量的影响,以及QSPr模型在信号完整性分析中的应用。此外,本文还提供了过冲仿真案例分析,介绍了实验设计、数据分析和仿真策略的优化。为了进一步提升调试效率,本文探讨了自动化工具在QSPr调试中的应用和编程实现
【性能分析工具全攻略】:提升速度的数值计算方法实战演练速成

# 摘要
本文系统地介绍了性能分析工具的概述、理论基础、实战应用以及性能优化的实战演练。首先,概述了性能分析工具的重要性及其涉及的性能指标和监控技术。其次,深入探讨了性能分析的理论基础,包括性能指标定义、分析方法的选择、监控技术原理和数学模型的运用。第三部分实战应用了多种性能分析工具,重点讲解了如何使用这些工具进行性能数据采集、处理和性能瓶颈的诊断与优化。在性能优化的实
统计学工程应用案例分析:习题到实践的桥梁
:max_bytes(150000):strip_icc()/axioms-56a8fa9a5f9b58b7d0f6e9eb.jpg)
# 摘要
统计学工程应用是现代工程技术领域的重要分支,它涉及统计学理论与工具在工程问题解决中的实际运用。本文首先概述了统计学工程应用的基础知识,随
【OpenWRT Portal认证速成课】:常见问题解决与性能优化
# 摘要
OpenWRT作为一款流行的开源路由器固件,其Portal认证功能在企业与家庭网络中得到广泛应用。本文首先介绍了OpenWRT Portal认证的基本原理和应用场景,随后详述了认证的配置与部署步骤,包括服务器安装、认证页面定制、流程控制参数设置及认证方式配置。为了应对实际应用中可
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )