车牌识别光照变化处理:直方图均衡、伽马校正和自适应阈值,应对光照挑战
发布时间: 2024-08-07 08:15:24 阅读量: 53 订阅数: 30 

opencv图像处理-opencv图像处理算法之图像增强.zip
# 1. 车牌识别光照变化的挑战**
车牌识别(LPR)是一种广泛应用于交通管理、安防监控等领域的计算机视觉技术。然而,光照变化对车牌识别系统的影响不容忽视。
光照变化会导致车牌图像亮度、对比度和颜色发生改变,从而影响车牌字符的提取和识别。例如,在逆光条件下,车牌字符可能变得难以辨认;而在强光条件下,车牌字符可能会过曝。这些光照变化给车牌识别系统带来了巨大的挑战,降低了识别的准确率和鲁棒性。
# 2. 光照变化处理技术
光照变化是影响车牌识别准确率的一个主要因素。为了应对光照变化,提出了各种图像处理技术来增强车牌图像的对比度和清晰度。本章将介绍三种常用的光照变化处理技术:直方图均衡、伽马校正和自适应阈值。
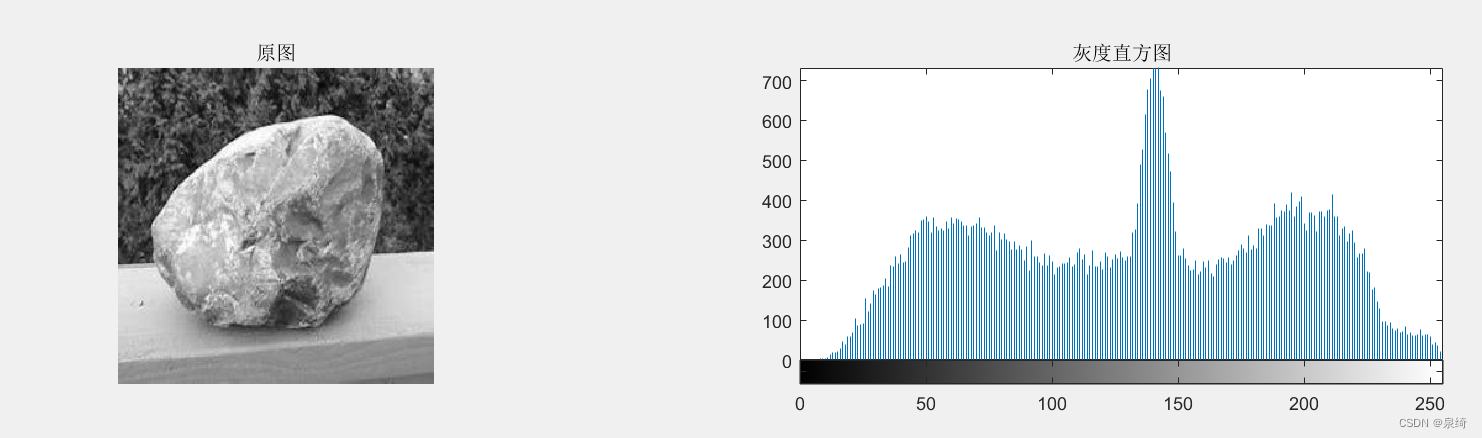
### 2.1 直方图均衡
**2.1.1 原理和实现**
直方图均衡是一种图像增强技术,通过调整图像像素的分布来改善图像的对比度。它通过以下步骤实现:
1. 计算图像的直方图,即每个灰度值出现的频率。
2. 将直方图归一化,使其总和为 1。
3. 对于每个像素,计算其归一化累积直方图值。
4. 将归一化累积直方图值映射到新的灰度值。
**代码块:**
```python
import cv2
def histogram_equalization(image):
"""
对图像进行直方图均衡化。
Args:
image: 输入图像。
Returns:
均衡化后的图像。
"""
# 计算直方图
hist = cv2.calcHist([image], [0], None, [256], [0, 256])
# 归一化直方图
hist = hist / hist.sum()
# 计算累积直方图
cdf = hist.cumsum()
# 映射到新的灰度值
equ = cdf[image]
return equ
```
**逻辑分析:**
该代码首先计算图像的直方图,然后将其归一化。接下来,它计算累积直方图,并使用累积直方图将每个像素映射到新的灰度值。
**参数说明:**
* `image`: 输入图像。
**2.1.2 应用场景和效果**
直方图均衡适用于对比度较低或光照不均匀的图像。它可以增强图像的对比度,使细节更加清晰。然而,它也可能导致图像过度增强,从而产生噪声或伪影。
### 2.2 伽马校正
**2.2.1 原理和实现**
伽马校正是一种非线性图像增强技术,通过调整图像像素的伽马值来改变图像的整体亮度和对比度。它通过以下步骤实现:
1. 将图像像素值转换为浮点数。
2. 对每个像素值应用伽马校正公式:`output = input^gamma`。
3. 将校正后的像素值转换为整数。
**代码块:**
```python
import cv2
def gamma_correction(image, gamma=1.0):
"""
对图像进行伽马校正。
Args:
image: 输入图像。
gamma: 伽马值。
Returns:
伽马校正后的图像。
"""
# 将像素值转换为浮点数
image = image.astype(float)
# 应用伽马校正
image = cv2.pow(image, gamma)
# 将校正后的像素值转换为整数
image = image.astype(np.uint8)
return image
```
**逻辑分析:**
该代码首先将图像像素值转换为浮点数,然后对每个像素值应用伽马校正公式。最后,它将校正后的像素值转换为整数。
**参数说明:**
* `image`: 输入图像。
* `gamma`: 伽马值(默认值为 1.0)。
**2.2.2 应用场景和效果**
伽马校正适用于图像过亮或过暗的情况。它可以调整图像的整体亮度和对比度,使图像更适合人眼观看。然而,它也可能导致图像饱和或失真。
### 2.3 自适应阈值
**2.3.1 原理和实现**
自适应阈值是一种局部图像增强技术,通过计算每个像素周围邻域的平均值或中值作为阈值来分割图像。它通过以下步骤实现:
1. 计算每个像素周围邻域的平均值或中值。
2. 将每个像素与计算出的阈值进行比较。
3. 如果像素值大于阈值,则将其设置为白色;否则,将其设置为黑色。
**代码块:**
```python
import cv2
def adaptive_threshold(image, block_size=11, C=5):
"""
对图像进行自适应阈值处理。
Args:
image: 输入图像。
block_size: 邻域大小。
C: 常数。
Returns:
自适应阈值处理后的图像。
"""
# 计算自适应阈值
thresh = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, block_size, C)
return thresh
```
**逻辑分析:**
该代码首先计算每个像素周围邻域的平均值。然后,它将每个像素与计算出的阈值进行比较,并将其设置为白色或黑色。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 Python OpenCV 车牌识别的各个方面。从图像预处理和字符识别到特征提取和机器学习,您将掌握车牌识别系统的核心技术。专栏还涵盖了优化技巧、图像处理技术、透视变换、模糊图像处理、光照变化处理、车牌定位、车牌追踪、车牌管理和车牌验证。通过深入解析和实战指南,您将全面了解车牌识别的原理和实践,并能够轻松打造自己的车牌识别系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
从数据中学习,提升备份策略:DBackup历史数据分析篇
# 摘要
随着数据量的快速增长,数据库备份的挑战与需求日益增加。本文从数据收集与初步分析出发,探讨了数据备份中策略制定的重要性与方法、预处理和清洗技术,以及数据探索与可视化的关键技术。在此基础上,基于历史数据的统计分析与优化方法被提出,以实现备份频率和数据量的合理管理。通过实践案例分析,本文展示了定制化备份策略的制定、实施步骤及效果评估,同时强调了风险管理与策略持续改进的必要性。最后,本文介绍了自动
【数据库升级】:避免风险,成功升级MySQL数据库的5个策略

# 摘要
随着信息技术的快速发展,数据库升级已成为维护系统性能和安全性的必要手段。本文详细探讨了数据库升级的必要性及其面临的挑战,分析了升级前的准备工作,包括数据库评估、环境搭建与数据备份。文章深入讨论了升级过程中的关键技术,如迁移工具的选择与配置、升级脚本的编写和执行,以及实时数据同步。升级后的测试与验证也是本文的重点,包括功能、性能测试以及用户接受测试(U
【射频放大器设计】:端阻抗匹配对放大器性能提升的决定性影响
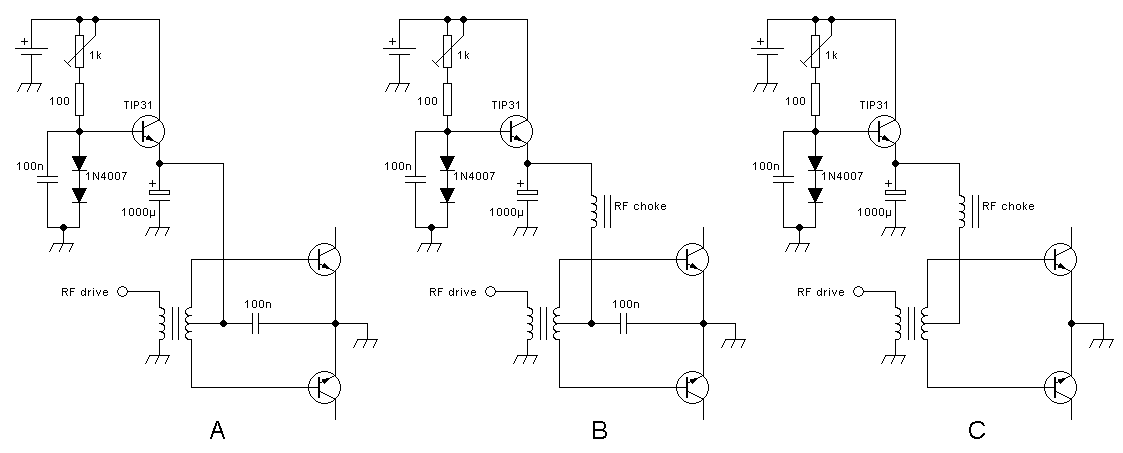
# 摘要
射频放大器设计中的端阻抗匹配对于确保设备的性能至关重要。本文首先概述了射频放大器设计及端阻抗匹配的基础理论,包括阻抗匹配的重要性、反射系数和驻波比的概念。接着,详细介绍了阻抗匹配设计的实践步骤、仿真分析与实验调试,强调了这些步骤对于实现最优射频放大器性能的必要性。本文进一步探讨了端阻抗匹配如何影响射频放大器的增益、带宽和稳定性,并展望了未来在新型匹配技术和新兴应用领域中阻抗匹配技术的发展前景。此外,本文分析了在高频高功率应用下的
【数据分布策略】:优化数据分布,提升FOX并行矩阵乘法效率

# 摘要
本文旨在深入探讨数据分布策略的基础理论及其在FOX并行矩阵乘法中的应用。首先,文章介绍数据分布策略的基本概念、目标和意义,随后分析常见的数据分布类型和选择标准。在理论分析的基础上,本文进一步探讨了不同分布策略对性
【遥感分类工具箱】:ERDAS分类工具使用技巧与心得

# 摘要
本文详细介绍了遥感分类工具箱的全面概述、ERDAS分类工具的基础知识、实践操作、高级应用、优化与自定义以及案例研究与心得分享。首先,概览了遥感分类工具箱的含义及其重要性。随后,深入探讨了ERDAS分类工具的核心界面功能、基本分类算法及数据预处理步骤。紧接着,通过案例展示了基于像素与对象的分类技术、分
面向对象编程表达式:封装、继承与多态的7大结合技巧
# 摘要
本文全面探讨了面向对象编程(OOP)的核心概念,包括封装、继承和多态。通过分析这些OOP基础的实践技巧和高级应用,揭示了它们在现代软件开发中的重要性和优化策略。文中详细阐述了封装的意义、原则及其实现方法,继承的原理及高级应用,以及多态的理论基础和编程技巧。通过对实际案例的深入分析,本文展示了如何综合应用封装、继承与多态来设计灵活、可扩展的系统,并确保代码质量与可维护性。本文旨在为开
电力电子技术的智能化:数据中心的智能电源管理
# 摘要
本文探讨了智能电源管理在数据中心的重要性,从电力电子技术基础到智能化电源管理系统的实施,再到技术的实践案例分析和未来展望。首先,文章介绍了电力电子技术及数据中心供电架构,并分析了其在能效提升中的应用。随后,深入讨论了智能化电源管理系统的组成、功能、监控技术以及能
【终端打印信息的项目管理优化】:整合强制打开工具提高项目效率
# 摘要
随着信息技术的快速发展,终端打印信息项目管理在数据收集、处理和项目流程控制方面的重要性日益突出。本文对终端打印信息项目管理的基础、数据处理流程、项目流程控制及效率工具整合进行了系统性的探讨。文章详细阐述了数据收集方法、数据分析工具的选择和数据可视化技术的使用,以及项目规划、资源分配、质量保证和团队协作的有效策略。同时,本文也对如何整合自动化工具、监控信息并生成实时报告,以及如何利用强制
TransCAD用户自定义指标:定制化分析,打造个性化数据洞察

# 摘要
TransCAD作为一种先进的交通规划和分析软件,提供了强大的用户自定义指标系统,使用户能够根据特定需求创建和管理个性化数据分析指标。本文首先介绍了TransCAD的基本概念及其指标系统,阐述了用户自定义指标的理论基础和架构,并讨论了其在交通分析中的重要性。随后,文章详细描述了在TransCAD中自定义指标的实现方法,
数据分析与报告:一卡通系统中的数据分析与报告制作方法

# 摘要
随着信息技术的发展,一卡通系统在日常生活中的应用日益广泛,数据分析在此过程中扮演了关键角色。本文旨在探讨一卡通系统数据的分析与报告制作的全过程。首先,本文介绍了数据分析的理论基础,包括数据分析的目的、类型、方法和可视化原理。随后,通过分析实际的交易数据和用户行为数据,本文展示了数据分析的实战应用。报告制作的理论与实践部分强调了如何组织和表达报告内容,并探索了设计和美化报告的方法。案
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )