Python车牌识别实战:一步步构建完整车牌识别系统,实战经验分享
发布时间: 2024-08-07 07:27:35 阅读量: 28 订阅数: 42 
# 1. 车牌识别基础
车牌识别(LPR)是一种计算机视觉技术,用于自动识别和读取车牌上的字符。它在交通管理、执法和安全等领域有着广泛的应用。
LPR系统通常由以下步骤组成:
- **图像采集:**使用摄像头或其他成像设备捕获车辆图像。
- **图像预处理:**对图像进行处理以增强车牌区域,包括灰度化、二值化和降噪。
- **车牌定位:**使用边缘检测和轮廓提取算法确定车牌的位置和尺寸。
- **字符识别:**使用模板匹配或神经网络等技术识别车牌上的字符。
# 2. 车牌识别算法
车牌识别算法是车牌识别系统的核心,其主要包括图像预处理、车牌定位和字符识别三个步骤。
### 2.1 图像预处理
图像预处理是车牌识别算法的第一步,其目的是将原始图像转化为适合后续处理的格式。常见的图像预处理操作包括:
#### 2.1.1 图像灰度化
图像灰度化是指将彩色图像转换为灰度图像,即将每个像素点的颜色值转换为一个灰度值。灰度值范围通常为 0-255,其中 0 表示黑色,255 表示白色。
**代码块:**
```python
import cv2
# 读取彩色图像
image = cv2.imread('car_plate.jpg')
# 转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 显示灰度图像
cv2.imshow('Gray Image', gray_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.imread()` 函数读取彩色图像并将其存储在 `image` 变量中。
* `cv2.cvtColor()` 函数将彩色图像转换为灰度图像并将其存储在 `gray_image` 变量中。
* `cv2.imshow()` 函数显示灰度图像。
* `cv2.waitKey(0)` 函数等待用户按下任意键退出程序。
* `cv2.destroyAllWindows()` 函数销毁所有窗口。
#### 2.1.2 图像二值化
图像二值化是指将灰度图像转换为二值图像,即将每个像素点的灰度值转换为 0 或 255。二值图像通常用于后续的轮廓提取和字符识别操作。
**代码块:**
```python
import cv2
# 读取灰度图像
gray_image = cv2.imread('gray_image.jpg', cv2.IMREAD_GRAYSCALE)
# 进行二值化处理
threshold = 127
binary_image = cv2.threshold(gray_image, threshold, 255, cv2.THRESH_BINARY)[1]
# 显示二值图像
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.imread()` 函数读取灰度图像并将其存储在 `gray_image` 变量中。
* `cv2.threshold()` 函数进行二值化处理,其中 `threshold` 参数指定二值化的阈值。
* `cv2.THRESH_BINARY` 参数指定二值化类型,表示将灰度值大于阈值的像素点转换为 255,小于阈值的像素点转换为 0。
* `cv2.imshow()` 函数显示二值图像。
* `cv2.waitKey(0)` 函数等待用户按下任意键退出程序。
* `cv2.destroyAllWindows()` 函数销毁所有窗口。
### 2.2 车牌定位
车牌定位是车牌识别算法的第二步,其目的是从图像中定位出车牌区域。常见的车牌定位方法包括:
#### 2.2.1 边缘检测
边缘检测是一种图像处理技术,用于检测图像中亮度或颜色变化明显的区域。在车牌定位中,边缘检测可以用来检测车牌边缘。
**代码块:**
```python
import cv2
# 读取二值图像
binary_image = cv2.imread('binary_image.jpg', cv2.IMREAD_GRAYSCALE)
# 进行边缘检测
edges = cv2.Canny(binary_image, 100, 200)
# 显示边缘检测结果
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.Canny()` 函数进行边缘检测,其中 `100` 和 `200` 参数分别指定边缘检测的低阈值和高阈值。
* 低阈值用于检测弱边缘,高阈值用于检测强边缘。
* `cv2.imshow()` 函数显示边缘检测结果。
* `cv2.waitKey(0)` 函数等待用户按下任意键退出程序。
* `cv2.destroyAllWindows()` 函数销毁所有窗口。
#### 2.2.2 轮廓提取
轮廓提取是一种图像处理技术,用于检测图像中具有相同或相似颜色或灰度值的连通区域。在车牌定位中,轮廓提取可以用来提取车牌区域。
**代码块:**
```python
import cv2
# 读取边缘检测结果
edges = cv2.imread('edges.jpg', cv2.IMREAD_GRAYSCALE)
# 进行轮廓提取
contours, hierarchy = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 绘制轮廓
cv2.drawContours(edges, contours, -1, (0, 255, 0), 2)
# 显示轮廓提取结果
cv2.imshow('Contours', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.findContours()` 函数进行轮廓提取,其中 `cv2.RETR_EXTERNAL` 参数指定只提取外部轮廓,`cv2.CHAIN_APPROX_SIMPLE` 参数指定使用简单轮廓近似方法。
* `cv2.drawContours()` 函数绘制轮廓,其中 `-1` 参数指定绘制所有轮廓,`(0, 255, 0)` 参数指定轮廓颜色为绿色,`2` 参数指定轮廓线宽。
* `cv2.imshow()` 函数显示轮廓提取结果。
* `cv2.waitKey(0)` 函数等待用户按下任意键退出程序。
* `cv2.destroyAllWindows()` 函数销毁所有窗口。
# 3.1 系统架构
车牌识别系统是一个典型的图像处理和模式识别系统,其系统架构一般分为前端图像采集和后端识别处理两部分。
#### 3.1.1 前端图像采集
前端图像采集负责获取车牌图像。常见的图像采集设备包括摄像头、监控器和移动设备。图像采集设备的性能直接影响车牌识别系统的识别效果。
#### 3.1.2 后端识别处理
后端识别处理负责对采集到的车牌图像进行处理和识别。主要包括图像预处理、车牌定位、字符识别等步骤。
### 3.2 数据管理
数据管理是车牌识别系统的重要组成部分,包括车牌数据收集、数据清洗和预处理。
#### 3.2.1 车牌数据收集
车牌数据收集是车牌识别系统训练和测试的基础。车牌数据可以从各种来源收集,如交通监控摄像头、停车场管理系统和人工标注。
#### 3.2.2 数据清洗和预处理
收集到的车牌数据往往存在噪声、畸变和不完整等问题。需要对数据进行清洗和预处理,以提高识别准确率。数据清洗和预处理包括图像增强、字符分割和归一化等步骤。
### 3.3 系统优化
为了提高车牌识别系统的性能,可以从以下几个方面进行优化:
#### 3.3.1 图像预处理优化
图像预处理是车牌识别系统的第一步,对识别效果有重要影响。可以通过优化图像预处理算法,如图像灰度化、二值化和降噪,来提高识别准确率。
#### 3.3.2 车牌定位优化
车牌定位是车牌识别系统中关键的一步。可以通过优化车牌定位算法,如边缘检测和轮廓提取,来提高定位准确率。
#### 3.3.3 字符识别优化
字符识别是车牌识别系统中最后一步,也是最困难的一步。可以通过优化字符识别算法,如模板匹配和神经网络,来提高识别准确率。
#### 3.3.4 系统集成优化
车牌识别系统是一个复杂的系统,涉及图像采集、图像处理、模式识别等多个模块。通过优化系统集成,如模块间通信和数据共享,可以提高系统的整体性能。
# 4. 车牌识别系统实现
### 4.1 Python环境配置
#### 4.1.1 Python安装
1. 前往官方网站下载最新版本的Python安装包。
2. 运行安装程序并按照提示进行安装。
3. 验证安装成功:在命令行中输入`python --version`,如果显示Python版本信息,则安装成功。
#### 4.1.2 库安装
车牌识别系统需要使用OpenCV、NumPy等库。可以使用pip工具进行安装:
```bash
pip install opencv-python numpy
```
### 4.2 图像预处理
#### 4.2.1 OpenCV库使用
OpenCV是一个计算机视觉库,提供了图像处理算法。
```python
import cv2
# 读取图像
image = cv2.imread("car_plate.jpg")
# 图像灰度化
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 图像二值化
binary_image = cv2.threshold(gray_image, 127, 255, cv2.THRESH_BINARY)[1]
```
#### 4.2.2 图像处理算法
* **灰度化:**将彩色图像转换为灰度图像,去除颜色信息。
* **二值化:**将灰度图像转换为二值图像,将像素值分为黑色和白色。
### 4.3 车牌定位
#### 4.3.1 边缘检测算法
边缘检测算法用于检测图像中的边缘。
```python
# Canny边缘检测
edges = cv2.Canny(binary_image, 100, 200)
```
#### 4.3.2 轮廓提取算法
轮廓提取算法用于提取图像中的轮廓。
```python
# 查找轮廓
contours, hierarchy = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
```
### 4.4 字符识别
#### 4.4.1 模板匹配算法
模板匹配算法通过与预定义的模板进行匹配来识别字符。
```python
# 定义模板
templates = [cv2.imread("template_0.jpg"), cv2.imread("template_1.jpg"), ...]
# 遍历轮廓
for contour in contours:
# 提取字符区域
x, y, w, h = cv2.boundingRect(contour)
char_image = binary_image[y:y+h, x:x+w]
# 与模板匹配
max_score = 0
matched_template = None
for template in templates:
score = cv2.matchTemplate(char_image, template, cv2.TM_CCOEFF_NORMED)
if score > max_score:
max_score = score
matched_template = template
# 识别字符
char = matched_template.split("/")[-1].split(".")[0]
```
#### 4.4.2 神经网络算法
神经网络算法通过训练数据学习字符特征,进行字符识别。
```python
# 导入神经网络模型
model = tf.keras.models.load_model("char_recognition_model.h5")
# 遍历轮廓
for contour in contours:
# 提取字符区域
x, y, w, h = cv2.boundingRect(contour)
char_image = binary_image[y:y+h, x:x+w]
# 归一化图像
char_image = cv2.resize(char_image, (28, 28))
char_image = char_image / 255.0
# 预测字符
char = model.predict(np.expand_dims(char_image, axis=0))[0]
```
# 5. 车牌识别系统测试
### 5.1 测试数据集准备
#### 5.1.1 数据集收集
收集一个包含不同车牌图像的测试数据集至关重要。该数据集应代表现实世界中遇到的各种车牌,包括不同尺寸、字体、颜色和照明条件。
#### 5.1.2 数据集标注
收集到的图像需要进行标注,以识别车牌区域和每个字符的位置。这可以通过使用图像标注工具或手动完成。
### 5.2 系统性能评估
#### 5.2.1 准确率计算
准确率是衡量系统识别车牌正确性的指标。它定义为正确识别的车牌数量与测试集中总车牌数量之比。
```python
accuracy = (TP + TN) / (TP + TN + FP + FN)
```
- TP:真阳性(正确识别的车牌)
- TN:真阴性(正确识别的非车牌)
- FP:假阳性(错误识别的非车牌)
- FN:假阴性(错误识别的车牌)
#### 5.2.2 召回率计算
召回率是衡量系统识别所有车牌的能力的指标。它定义为正确识别的车牌数量与测试集中所有车牌数量之比。
```python
recall = TP / (TP + FN)
```
- TP:真阳性(正确识别的车牌)
- FN:假阴性(错误识别的车牌)
### 5.2.3 F1 分数计算
F1 分数是准确率和召回率的加权平均值,它考虑了系统的整体性能。
```python
f1_score = 2 * (precision * recall) / (precision + recall)
```
- precision:准确率
- recall:召回率
### 5.2.4 测试结果分析
测试结果应仔细分析,以识别系统中的任何弱点或改进领域。这可能包括:
- 不同车牌类型的识别准确率
- 在不同照明条件下的识别性能
- 系统处理时间和资源消耗
# 6. 车牌识别系统部署**
**6.1 系统部署环境**
系统部署环境主要包括服务器配置和网络环境。
**6.1.1 服务器配置**
服务器配置主要包括硬件配置和软件配置。
- **硬件配置:**
- CPU:推荐使用多核处理器,如 Intel Xeon 或 AMD EPYC
- 内存:推荐使用 16GB 或以上内存
- 硬盘:推荐使用固态硬盘 (SSD)
- 网络接口:推荐使用千兆以太网或以上
- **软件配置:**
- 操作系统:推荐使用 Linux 系统,如 Ubuntu 或 CentOS
- Python:推荐使用 Python 3.6 或以上版本
- OpenCV:推荐使用 OpenCV 4.0 或以上版本
- 其他依赖库:根据具体实现而定
**6.1.2 网络环境**
网络环境主要包括网络拓扑、带宽和安全配置。
- **网络拓扑:**
- 推荐使用三层网络结构,包括接入层、汇聚层和核心层
- 服务器应部署在汇聚层或核心层
- 客户端应部署在接入层
- **带宽:**
- 推荐使用千兆以太网或以上带宽
- 对于高并发场景,可能需要使用更大带宽
- **安全配置:**
- 服务器应安装防火墙和入侵检测系统
- 网络应使用加密协议,如 HTTPS
- 定期进行安全漏洞扫描和补丁更新
**6.2 系统部署流程**
系统部署流程主要包括代码部署和服务启动。
**6.2.1 代码部署**
- 将车牌识别系统代码上传到服务器
- 创建虚拟环境并安装依赖库
- 将代码复制到虚拟环境中
**6.2.2 服务启动**
- 根据具体实现,选择合适的服务启动方式,如 Gunicorn 或 uWSGI
- 配置服务启动参数,如监听端口和进程数
- 启动服务并验证是否正常运行

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 Python OpenCV 车牌识别的各个方面。从图像预处理和字符识别到特征提取和机器学习,您将掌握车牌识别系统的核心技术。专栏还涵盖了优化技巧、图像处理技术、透视变换、模糊图像处理、光照变化处理、车牌定位、车牌追踪、车牌管理和车牌验证。通过深入解析和实战指南,您将全面了解车牌识别的原理和实践,并能够轻松打造自己的车牌识别系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【特征工程稀缺技巧】:标签平滑与标签编码的比较及选择指南
# 1. 特征工程简介
## 1.1 特征工程的基本概念
特征工程是机器学习中一个核心的步骤,它涉及从原始数据中选取、构造或转换出有助于模型学习的特征。优秀的特征工程能够显著提升模型性能,降低过拟合风险,并有助于在有限的数据集上提炼出有意义的信号。
## 1.2 特征工程的重要性
在数据驱动的机器学习项目中,特征工程的重要性仅次于数据收集。数据预处理、特征选择、特征转换等环节都直接影响模型训练的效率和效果。特征工程通过提高特征与目标变量的关联性来提升模型的预测准确性。
## 1.3 特征工程的工作流程
特征工程通常包括以下步骤:
- 数据探索与分析,理解数据的分布和特征间的关系。
- 特
【特征选择工具箱】:R语言中的特征选择库全面解析

# 1. 特征选择在机器学习中的重要性
在机器学习和数据分析的实践中,数据集往往包含大量的特征,而这些特征对于最终模型的性能有着直接的影响。特征选择就是从原始特征中挑选出最有用的特征,以提升模型的预测能力和可解释性,同时减少计算资源的消耗。特征选择不仅能够帮助我
p值在机器学习中的角色:理论与实践的结合

# 1. p值在统计假设检验中的作用
## 1.1 统计假设检验简介
统计假设检验是数据分析中的核心概念之一,旨在通过观察数据来评估关于总体参数的假设是否成立。在假设检验中,p值扮演着决定性的角色。p值是指在原
【时间序列分析】:如何在金融数据中提取关键特征以提升预测准确性

# 1. 时间序列分析基础
在数据分析和金融预测中,时间序列分析是一种关键的工具。时间序列是按时间顺序排列的数据点,可以反映出某
【复杂数据的置信区间工具】:计算与解读的实用技巧
# 1. 置信区间的概念和意义
置信区间是统计学中一个核心概念,它代表着在一定置信水平下,参数可能存在的区间范围。它是估计总体参数的一种方式,通过样本来推断总体,从而允许在统计推断中存在一定的不确定性。理解置信区间的概念和意义,可以帮助我们更好地进行数据解释、预测和决策,从而在科研、市场调研、实验分析等多个领域发挥作用。在本章中,我们将深入探讨置信区间的定义、其在现实世界中的重要性以及如何合理地解释置信区间。我们将逐步揭开这个统计学概念的神秘面纱,为后续章节中具体计算方法和实际应用打下坚实的理论基础。
# 2. 置信区间的计算方法
## 2.1 置信区间的理论基础
### 2.1.1
自然语言处理中的独热编码:应用技巧与优化方法
# 1. 自然语言处理与独热编码概述
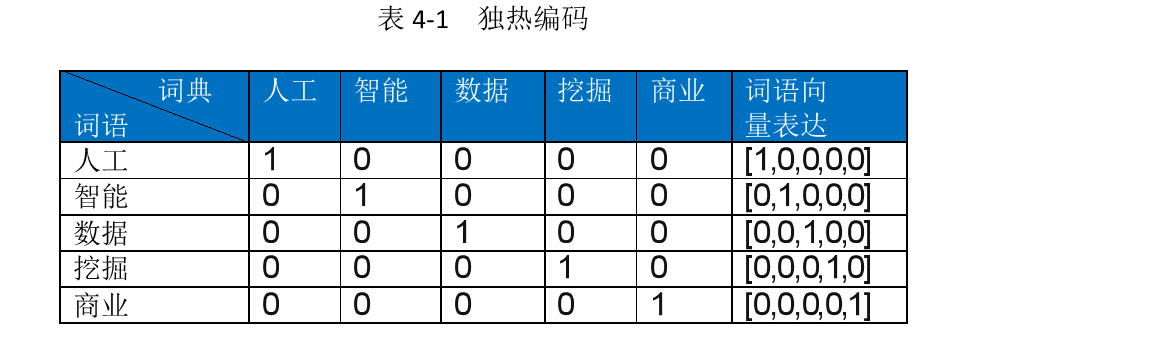
自然语言处理(NLP)是计算机科学与人工智能领域中的一个关键分支,它让计算机能够理解、解释和操作人类语言。为了将自然语言数据有效转换为机器可处理的形式,独热编码(One-Hot Encoding)成为一种广泛应用的技术。
## 1.1 NLP中的数据表示
在NLP中,数据通常是以文本形式出现的。为了将这些文本数据转换为适合机器学习模型的格式,我们需要将单词、短语或句子等元
训练集大小对性能的影响:模型评估的10大策略

# 1. 模型评估的基础知识
在机器学习与数据科学领域中,模型评估是验证和比较机器学习算法表现的核心环节。本章节将从基础层面介绍模型评估的基本概念和重要性。我们将探讨为什么需要评估模型、评估模型的目的以及如何选择合适的评估指标。
## 1.1 评估的重要性
模型评估是为了确定模型对未知数据的预测准确性与可靠性。一个训练好的模型,只有在独立的数据集上表现良好,才能够
大样本理论在假设检验中的应用:中心极限定理的力量与实践
# 1. 中心极限定理的理论基础
## 1.1 概率论的开篇
概率论是数学的一个分支,它研究随机事件及其发生的可能性。中心极限定理是概率论中最重要的定理之一,它描述了在一定条件下,大量独立随机变量之和(或平均值)的分布趋向于正态分布的性
【交互特征的影响】:分类问题中的深入探讨,如何正确应用交互特征
# 1. 交互特征在分类问题中的重要性
在当今的机器学习领域,分类问题一直占据着核心地位。理解并有效利用数据中的交互特征对于提高分类模型的性能至关重要。本章将介绍交互特征在分类问题中的基础重要性,以及为什么它们在现代数据科学中变得越来越不可或缺。
## 1.1 交互特征在模型性能中的作用
交互特征能够捕捉到数据中的非线性关系,这对于模型理解和预测复杂模式至关重要。例如
【PCA算法优化】:减少计算复杂度,提升处理速度的关键技术

# 1. PCA算法简介及原理
## 1.1 PCA算法定义
主成分分析(PCA)是一种数学技术,它使用正交变换来将一组可能相关的变量转换成一组线性不相关的变量,这些新变量被称为主成分。
## 1.2 应用场景概述
PCA广泛应用于图像处理、降维、模式识别和数据压缩等领域。它通过减少数据的维度,帮助去除冗余信息,同时尽可能保
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )