STM32单片机小车电机驱动原理与实践:掌握电机驱动,让小车动起来
发布时间: 2024-07-02 03:54:09 阅读量: 173 订阅数: 47 

# 1. 电机驱动原理
### 1.1 电机的工作原理
电机是一种将电能转换为机械能的装置。其工作原理基于电磁感应定律,即当导体在磁场中运动时,导体会产生感应电动势,从而形成电流。在电机中,定子绕组产生磁场,转子绕组在磁场中运动,产生感应电动势,从而产生转矩,带动转子旋转。
### 1.2 电机驱动器的类型
电机驱动器是一种电子电路,用于控制电机的速度、方向和扭矩。电机驱动器的类型主要有:
* **直流电机驱动器:**用于控制直流电机的速度和方向。
* **交流电机驱动器:**用于控制交流电机的速度和扭矩。
* **步进电机驱动器:**用于控制步进电机的运动。
# 2. STM32单片机电机驱动编程
### 2.1 STM32单片机的PWM功能
#### 2.1.1 PWM定时器的配置
STM32单片机集成了多个PWM定时器,用于生成PWM波形。PWM定时器的配置主要包括以下几个步骤:
1. **时钟配置:**为PWM定时器选择时钟源和时钟分频系数,以确定PWM波形的频率。
2. **预分频器:**设置预分频器,对时钟信号进行分频,进一步降低PWM波形的频率。
3. **计数器模式:**选择计数器模式,如向上计数模式或中心对称模式,决定PWM波形的形状。
4. **自动重载值:**设置自动重载值,确定PWM波形的周期。
5. **比较值:**设置比较值,决定PWM波形的占空比。
```c
// STM32F103单片机PWM定时器配置示例
// TIM2初始化为10kHz PWM波形
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); // 开启TIM2时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1; // 时钟分频系数为72
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式
TIM_TimeBaseStructure.TIM_Period = 1000 - 1; // 自动重载值为1000
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); // 初始化TIM2
TIM_Cmd(TIM2, ENABLE); // 启动TIM2
```
#### 2.1.2 PWM波形的生成
配置好PWM定时器后,即可生成PWM波形。PWM波形由比较值决定,当计数器值小于比较值时,输出高电平;当计数器值大于比较值时,输出低电平。通过调节比较值,可以改变PWM波形的占空比。
```c
// 设置TIM2通道1的比较值,改变PWM波形的占空比
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // PWM模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 输出使能
TIM_OCInitStructure.TIM_Pulse = 500; // 比较值为500,占空比为50%
TIM_OC1Init(TIM2, &TIM_OCInitStructure); // 初始化TIM2通道1
```
### 2.2 电机驱动器的控制
#### 2.2.1 H桥驱动器的控制
H桥驱动器是一种常见的电机驱动器,它可以控制电机的正反转和制动。STM32单片机通过控制H桥驱动器的四个开关管,实现对电机的控制。
```c
// STM32F103单片机控制H桥驱动器示例
// GPIO端口初始化,用于控制H桥驱动器的开关管
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3; // 控制H桥驱动器的4个开关管
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 输出速度50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA端口
// 正转控制
GPIO_SetBits(GPIOA, GPIO_Pin_0 | GPIO_Pin_1); // 设置GPIOA的0和1引脚为高电平,H桥驱动器正转
GPIO_ResetBits(GPIOA, GPIO_Pin_2 | GPIO_Pin_3); // 设置GPIOA的2和3引脚为低电平
// 反转控制
GPIO_SetBits(GPIOA, GPIO_Pin_2 | GPIO_Pin_3); // 设置GPIOA的2和3引脚为高电平,H桥驱动器反转
GPIO_ResetBits(GPIOA, GPIO_Pin_0 | GPIO_Pin_1); // 设置GPIOA的0和1引脚为低电平
```
#### 2.2.2 步进电机的控制
步进电机是一种增量电机,它通过逐个脉冲控制,实现精确的定位。STM32单片机通过控制步进电机驱动器的脉冲和方向引

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 STM32 单片机小车为主题,从入门指南到高级开发,提供全面的知识和实战指导。专栏涵盖了小车的硬件架构、软件开发环境搭建、电机驱动原理、传感器数据采集、无线通信集成、常见故障分析、代码优化技巧、硬件优化策略等内容。此外,还深入探讨了小车的智能巡逻车设计、无人驾驶小车开发、机器人控制与路径规划、嵌入式 Linux 系统移植、人工智能算法应用、物联网技术集成等前沿技术,帮助读者打造更智能、更可靠的小车。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【目标变量优化】:机器学习中因变量调整的高级技巧
# 1. 目标变量优化概述
在数据科学和机器学习领域,目标变量优化是提升模型预测性能的核心步骤之一。目标变量,又称作因变量,是预测模型中希望预测或解释的变量。通过优化目标变量,可以显著提高模型的精确度和泛化能力,进而对业务决策产生重大影响。
## 目标变量的重要性
目标变量的选择与优化直接关系到模型性能的好坏。正确的目标变量可以帮助模
【Python预测模型构建全记录】:最佳实践与技巧详解
# 1. Python预测模型基础
Python作为一门多功能的编程语言,在数据科学和机器学习领域表现得尤为出色。预测模型是机器学习的核心应用之一,它通过分析历史数据来预测未来的趋势或事件。本章将简要介绍预测模型的概念,并强调Python在这一领域中的作用。
## 1.1 预测模型概念
预测模型是一种统计模型,它利用历史数据来预测未来事件的可能性。这些模型在金融、市场营销、医疗保健和其
探索与利用平衡:强化学习在超参数优化中的应用
# 1. 强化学习与超参数优化的交叉领域
## 引言
随着人工智能的快速发展,强化学习作为机器学习的一个重要分支,在处理决策过程中的复杂问题上显示出了巨大的潜力。与此同时,超参数优化在提高机器学习模型性能方面扮演着关键角色。将强化学习应用于超参数优化,不仅可实现自动化,还能够通过智能策略提升优化效率,对当前AI领域的发展产生了深远影响。
## 强化学习与超参数优化的关系
强化学习能够通过与环境的交互来学
【生物信息学中的LDA】:基因数据降维与分类的革命
# 1. LDA在生物信息学中的应用基础
## 1.1 LDA的简介与重要性
在生物信息学领域,LDA(Latent Dirichlet Allocation)作为一种高级的统计模型,自其诞生以来在文本数据挖掘、基因表达分析等众多领域展现出了巨大的应用潜力。LDA模型能够揭示大规模数据集中的隐藏模式,有效地应用于发现和抽取生物数据中的隐含主题,这使得它成为理解复杂生物信息和推动相关研究的重要工具。
## 1.2 LDA在生物信息学中的应用场景
模型参数泛化能力:交叉验证与测试集分析实战指南

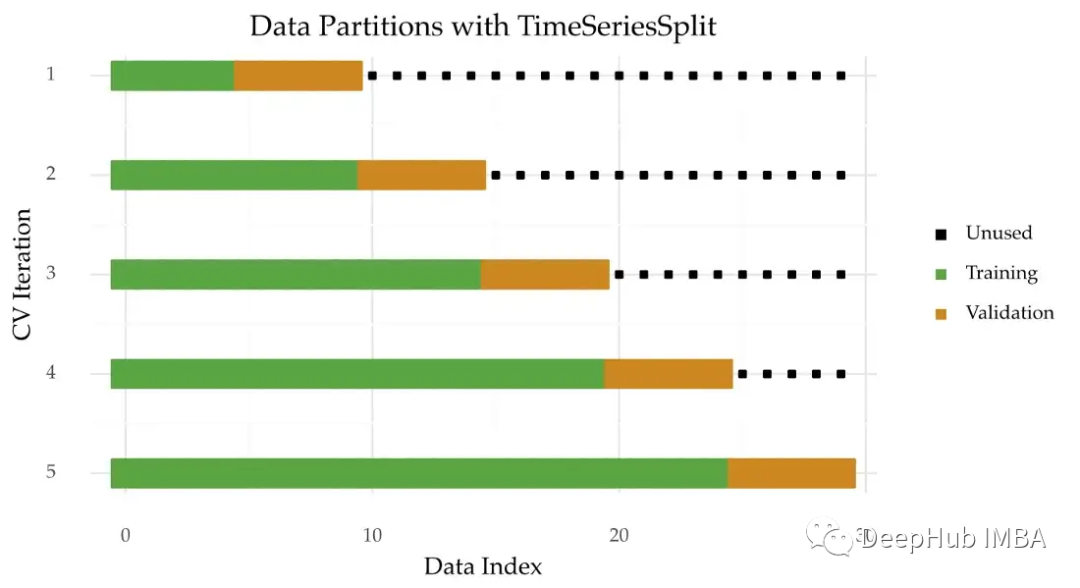
# 1. 交叉验证与测试集的基础概念
在机器学习和统计学中,交叉验证(Cross-Validation)和测试集(Test Set)是衡量模型性能和泛化能力的关键技术。本章将探讨这两个概念的基本定义及其在数据分析中的重要性。
## 1.1 交叉验证与测试集的定义
交叉验证是一种统计方法,通过将原始数据集划分成若干小的子集,然后将模型在这些子集上进行训练和验证,以
机器学习模型验证:自变量交叉验证的6个实用策略
# 1. 交叉验证在机器学习中的重要性
在机器学习和统计建模中,交叉验证是一种强有力的模型评估方法,用以估计模型在独立数据集上的性能。它通过将原始数据划分为训练集和测试集来解决有限样本量带来的评估难题。交叉验证不仅可以减少模型因随机波动而导致的性能评估误差,还可以让模型对不同的数据子集进行多次训练和验证,进而提高评估的准确性和可靠性。
## 1.1 交叉验证的目的和优势
交叉验证
【从零开始构建卡方检验】:算法原理与手动实现的详细步骤
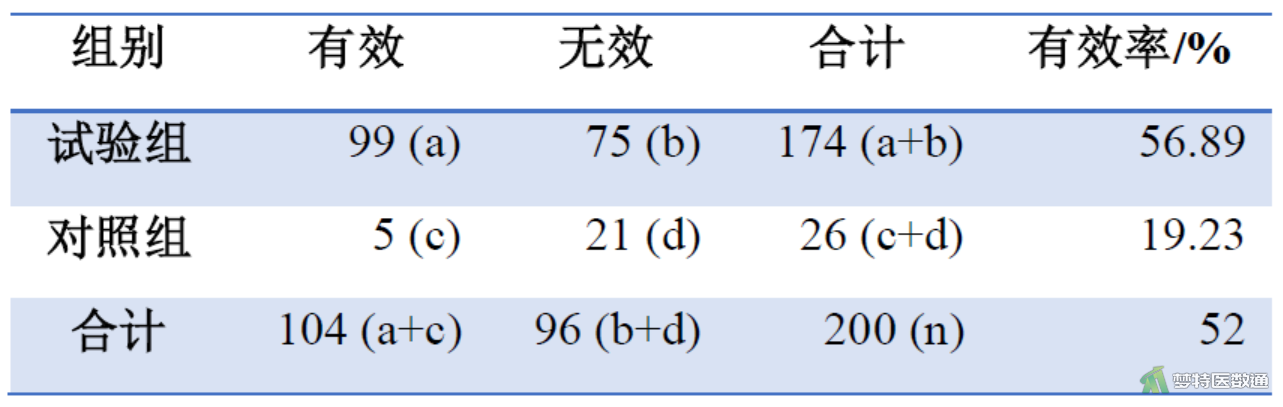
# 1. 卡方检验的统计学基础
在统计学中,卡方检验是用于评估两个分类变量之间是否存在独立性的一种常用方法。它是统计推断的核心技术之一,通过观察值与理论值之间的偏差程度来检验假设的真实性。本章节将介绍卡方检验的基本概念,为理解后续的算法原理和实践应用打下坚实的基础。我们将从卡方检验的定义出发,逐步深入理解其统计学原理和在数据分析中的作用。通过本章学习,读者将能够把握卡方检验在统计学中的重要性
贝叶斯优化:智能搜索技术让超参数调优不再是难题
# 1. 贝叶斯优化简介
贝叶斯优化是一种用于黑盒函数优化的高效方法,近年来在机器学习领域得到广泛应用。不同于传统的网格搜索或随机搜索,贝叶斯优化采用概率模型来预测最优超参数,然后选择最有可能改进模型性能的参数进行测试。这种方法特别适用于优化那些计算成本高、评估函数复杂或不透明的情况。在机器学习中,贝叶斯优化能够有效地辅助模型调优,加快算法收敛速度,提升最终性能。
接下来,我们将深入探讨贝叶斯优化的理论基础,包括它的工作原理以及如何在实际应用中进行操作。我们将首先介绍超参数调优的相关概念,并探讨传统方法的局限性。然后,我们将深入分析贝叶斯优化的数学原理,以及如何在实践中应用这些原理。通过对
时间序列分析的置信度应用:预测未来的秘密武器
# 1. 时间序列分析的理论基础
在数据科学和统计学中,时间序列分析是研究按照时间顺序排列的数据点集合的过程。通过对时间序列数据的分析,我们可以提取出有价值的信息,揭示数据随时间变化的规律,从而为预测未来趋势和做出决策提供依据。
## 时间序列的定义
时间序列(Time Series)是一个按照时间顺序排列的观测值序列。这些观测值通常是一个变量在连续时间点的测量结果,可以是每秒的温度记录,每日的股票价
多变量时间序列预测区间:构建与评估

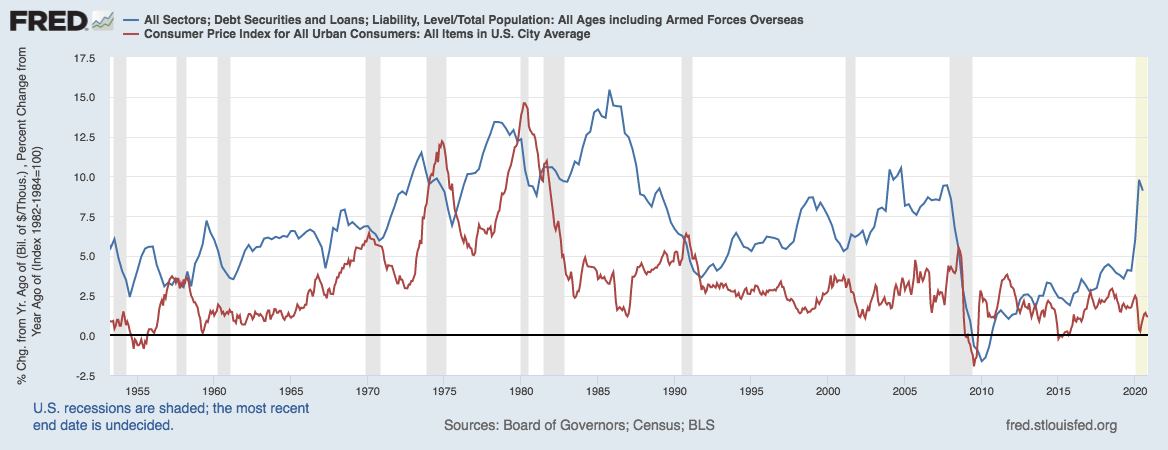
# 1. 时间序列预测理论基础
在现代数据分析中,时间序列预测占据着举足轻重的地位。时间序列是一系列按照时间顺序排列的数据点,通常表示某一特定变量随时间变化的情况。通过对历史数据的分析,我们可以预测未来变量的发展趋势,这对于经济学、金融、天气预报等诸多领域具有重要意义。
## 1.1 时间序列数据的特性
时间序列数据通常具有以下四种主要特性:趋势(Tre
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )