网络流量优化与匹配问题:最大流问题的实战应用
发布时间: 2024-08-25 10:30:01 阅读量: 43 订阅数: 23 
# 1. 网络流量优化概述
网络流量优化旨在提高网络资源的利用率和网络性能,以满足不断增长的网络流量需求。最大流问题作为网络流量优化中的重要理论基础,为解决网络流量优化问题提供了有效的数学模型。
最大流问题描述了在给定的网络中,从源点到汇点的最大流量。通过求解最大流问题,可以确定网络中可容纳的最大流量,并找出网络中的瓶颈。基于最大流问题,可以设计出各种网络流量优化算法,例如流量路由优化、带宽分配优化等,以提高网络性能。
# 2. 最大流问题的理论基础
### 2.1 最大流问题的定义和性质
**定义:**
最大流问题是指在一个有向图中,从源点到汇点的最大流量。流量是指通过网络中每条边的最大数据量。
**性质:**
* **流守恒定律:**除了源点和汇点外,网络中每个节点的流入量等于流出量。
* **最大流最小割定理:**网络的最大流等于其最小割的容量。最小割是指将网络划分为两个集合,使得源点和汇点分别属于不同的集合,且割集中所有边的容量和最小。
### 2.2 福特-福克森算法和埃德蒙兹-卡普算法
**福特-福克森算法:**
福特-福克森算法是一种求解最大流的贪心算法。其基本思想是:
1. 寻找一条从源点到汇点的增广路径,即一条容量大于 0 的路径。
2. 沿增广路径将流量增加到最小容量的边。
3. 重复步骤 1 和 2,直到无法找到增广路径。
**埃德蒙兹-卡普算法:**
埃德蒙兹-卡普算法是福特-福克森算法的改进版本。其主要改进在于:
1. 使用广度优先搜索(BFS)寻找增广路径,提高了效率。
2. 在每次增广后,反向寻找增广路径,减少了算法的运行时间。
### 2.3 最大流问题的复杂度分析
福特-福克森算法和埃德蒙兹-卡普算法的时间复杂度均为 O(VE^2),其中 V 是网络中的节点数,E 是边数。
**代码块:**
```python
def ford_fulkerson(graph, source, sink):
"""
福特-福克森算法求解最大流
参数:
graph: 网络的有向图,表示为字典,键为节点,值为与该节点相连的边
source: 源点
sink: 汇点
返回:
最大流
"""
# 初始化残余网络
residual_graph = {}
for node in graph:
residual_graph[node] = {}
for neighbor, capacity in graph[node].items():
residual_graph[node][neighbor] = capacity
# 初始化流量
flow = {}
for node in graph:
for neighbor in graph[node]:
flow[(node, neighbor)] = 0
# 寻找增广路径并更新流量
while True:
# 寻找增广路径
path = bfs(residual_graph, source, sink)
if not path:
break
# 计算增广路径的最小容量
min_capacity = min(residual_graph[node][neighbor] for node, neighbor in path)
# 更新流量
for node, neighbor in path:
flow[(node, neighbor)] += min_capacity
residual_graph[node][neighbor] -= min_capacity
residual_graph[neighbor][node] += min_capacity
# 返回最大流
return sum(flow[(source, neighbor)] for neighbor in graph[source])
```
**逻辑分析:**
该代码实现了福特-福克森算法。算法首先初始化残余网络,然后循环寻找增广路径。如果找到增广路径,则计算最小容量并更新流量和残余网络。算法重复此过程,直到无法找到增广路径。最后,返回最大流。
**参数说明:**
* `graph`:网络的有向图,表示为字典,键为节点,值为与该节点相连的边。
* `source`:源点。
* `sink`:汇点。
# 3.1 流量路由优化
#### 3.1.1 最短路径算法
最短路径算法是一种用于在网络中查找两个节点之间最短路径的算法。在流量路由优化中,最短路径算法可以用来计算从源节点到目标节点的最小跳数路径,从而实现流量的快速传输。
**Dijkstra 算法**
Dijkstra 算法是一种经典的最短路径算法,它使用贪心策略逐个扩展路径,直到找到最短路径。算法的步骤如下:
```python
def dijkstra(graph, source):
# 初始化距离和前驱节点
distance = {node: float('inf') for node in graph}
distance[source] = 0
predecessor = {node: None for node in graph}
# 初始化未访问节点集合
unvisited = set(graph)
# 循环遍历未访问节点
while unvisited:
# 找到未访问节点中距离最小的节点
current = min(unvisited, key=lambda node: distance[node])
# 访问该节点
unvisited.remove(current)
# 更新相邻节点的距离和前驱节点
for neighbor in graph[current]:
new_distance = distance[current] + graph[current][neighbor]
if new_distance < distance[neighbor]:
distance[neighbor] = new_distance
predecessor[neighbor] = current
# 返回距离和前驱节点
return distance, predecessor
```
**逻辑分析:**
* 算法初始化时,将所有节点的距离设为无穷大,源节点的距离设为 0。
* 算法循环遍历未访问节点,每次找到距离最小的节点。
* 对于当前节点,算法更新其相邻节点的距离和前驱节点。
* 算法重复上述步骤,直到所有节点都被访问。
**参数说明:**
* `graph`:表示网络的图,其中键是节点,值是相邻节点的权重。
* `source`:表示源节点。
#### 3.1.2 最小跳数算法
最小跳数算法是一种特殊的最短路径算法,它专注于找到两个节点之间跳数最少的路径。在流量路由优化中,最小跳数算法可以用来减少网络中的拥塞,提高流量的传输效率。
**广度优先搜索 (BFS)**
BFS 是一种广度优先搜索算法,它可以用来找到两个节点之间跳数最少的路径。算法的步骤如下:
```python
def bfs(graph, source, target):
# 初始化队列和访问标记
queue = [source]
visited = {node: False for node in graph}
visited[source] = True
# 初始化跳数
distance = {node: -1 for node in graph}
distance[source] = 0
# 循环遍历队列
while queue:
# 出队一个节点
current = queue.pop(0)
# 如果找到目标节点,返回跳数
if current == target:
return distance[current]
# 访问该节点的相邻节点
for neighbor in graph[current]:
if not visited[neighbor]:
queue.append(neighbor)
visited[neighbor] = True
distance[neighbor] = distance[current] + 1
# 如果未找到目标节点,返回 -1
return -1
```
**逻辑分析:**
* 算法初始化时,将源节点的跳数设为 0,其他节点的跳数设为 -1。
* 算法循环遍历队列,每次出队一个节点。
* 对于当前节点,算法访问其相邻节点,并更新相邻节点的跳数。
* 算法重复上述步骤,直到找到目标节点或队列为空。
**参数说明:**
* `graph`:表示网络的图,其中键是节点,值是相邻节点的权重。
* `source`:表示源节点。
* `target`:表示目标节点。
# 4. 最大流问题在匹配问题中的应用
### 4.1 二分图匹配问题
**4.1.1 匈牙利算法**
匈牙利算法是一种解决二分图匹配问题的经典贪心算法。其核心思想是通过不断寻找增广路径来扩大匹配规模,直到达到最大匹配。
**算法流程:**
1. 初始化一个空匹配。
2. 对于图中的每个未匹配顶点,寻找一条从该顶点到未匹配顶点的增广路径。
3. 如果找到增广路径,则沿着该路径交替增加和减少匹配边,从而扩大匹配规模。
4. 重复步骤 2 和 3,直到无法找到增广路径为止。
**代码块:**
```python
def hungarian_algorithm(graph):
"""
匈牙利算法求解二分图匹配问题。
参数:
graph: 二分图,用邻接矩阵表示。
返回:
最大匹配。
"""
# 初始化匹配
matching = {}
# 对于每个未匹配顶点
for vertex in graph:
if vertex not in matching:
# 寻找增广路径
path = find_augmenting_path(graph, vertex)
# 如果找到增广路径
if path:
# 沿着增广路径交替增加和减少匹配边
for i in range(len(path) - 1):
if path[i] in matching:
del matching[path[i]]
else:
matching[path[i]] = path[i + 1]
return matching
def find_augmenting_path(graph, vertex):
"""
寻找从顶点 vertex 出发的增广路径。
参数:
graph: 二分图,用邻接矩阵表示。
vertex: 起始顶点。
返回:
增广路径,如果不存在则返回 None。
"""
# 初始化访问标记
visited = set()
# 初始化路径
path = [vertex]
# 深度优先搜索寻找增广路径
while path:
current_vertex = path[-1]
# 如果当前顶点未访问
if current_vertex not in visited:
visited.add(current_vertex)
# 对于当前顶点的每个相邻顶点
for neighbor in graph[current_vertex]:
# 如果相邻顶点未匹配或沿着相邻顶点的匹配边可以找到增广路径
if neighbor not in matching or find_augmenting_path(graph, matching[neighbor]):
path.append(neighbor)
break
# 如果当前顶点已访问,则回溯
else:
path.pop()
# 如果路径长度为奇数,则找到增广路径
if len(path) % 2 == 1:
return path
else:
return None
```
**逻辑分析:**
* 初始化匹配为空集,表示图中没有匹配的边。
* 对于每个未匹配顶点,调用 `find_augmenting_path` 函数寻找增广路径。
* 如果找到增广路径,则沿着该路径交替增加和减少匹配边,扩大匹配规模。
* 重复以上步骤,直到无法找到增广路径,此时算法终止。
**参数说明:**
* `graph`:二分图,用邻接矩阵表示。
* `vertex`:起始顶点。
### 4.1.2 霍普克罗夫特-卡普算法
霍普克罗夫特-卡普算法是另一种解决二分图匹配问题的算法,其效率优于匈牙利算法。该算法基于最大流问题,通过不断寻找增广路径来扩大匹配规模。
**算法流程:**
1. 构造一个二分图的残量网络。
2. 寻找残量网络中的最大流。
3. 根据最大流,更新匹配。
**代码块:**
```python
def hopcroft_karp_algorithm(graph):
"""
霍普克罗夫特-卡普算法求解二分图匹配问题。
参数:
graph: 二分图,用邻接矩阵表示。
返回:
最大匹配。
"""
# 构造残量网络
residual_network = build_residual_network(graph)
# 寻找残量网络中的最大流
max_flow = find_max_flow(residual_network)
# 根据最大流,更新匹配
matching = update_matching(max_flow)
return matching
def build_residual_network(graph):
"""
构造二分图的残量网络。
参数:
graph: 二分图,用邻接矩阵表示。
返回:
残量网络,用邻接矩阵表示。
"""
# 初始化残量网络
residual_network = [[0 for _ in range(len(graph))] for _ in range(len(graph))]
# 对于每个顶点对
for i in range(len(graph)):
for j in range(len(graph[0])):
# 如果顶点 i 和 j 相邻
if graph[i][j] == 1:
# 在残量网络中添加一条容量为 1 的边
residual_network[i][j] = 1
return residual_network
def find_max_flow(residual_network):
"""
寻找残量网络中的最大流。
参数:
residual_network: 残量网络,用邻接矩阵表示。
返回:
最大流,用邻接矩阵表示。
"""
# 初始化最大流
max_flow = [[0 for _ in range(len(residual_network))] for _ in range(len(residual_network))]
# 寻找增广路径
while True:
# 使用广度优先搜索寻找增广路径
path = find_augmenting_path(residual_network)
# 如果没有增广路径,则算法终止
if not path:
break
# 沿增广路径更新最大流
for i in range(len(path) - 1):
max_flow[path[i]][path[i + 1]] += 1
max_flow[path[i + 1]][path[i]] -= 1
return max_flow
def update_matching(max_flow):
"""
根据最大流,更新匹配。
参数:
max_flow: 最大流,用邻接矩阵表示。
返回:
最大匹配。
"""
# 初始化匹配
matching = {}
# 对于每个顶点对
for i in range(len(max_flow)):
for j in range(len(max_flow[0])):
# 如果最大流中存在一条容量为 1 的边
if max_flow[i][j] == 1:
# 将顶点 i 和 j 加入匹配
matching[i] = j
return matching
```
**逻辑分析:**
* 构造二分图的残量网络,其中边容量表示从一个顶点到另一个顶点的最大流量。
* 寻找残量网络中的最大流,表示从源点到汇点的最大流量。
* 根据最大流,更新匹配,将最大流中容量为 1 的边对应的顶点对加入匹配。
**参数说明:**
* `graph`:二分图,用邻接矩阵表示。
* `residual_network`:残量网络,用邻接矩阵表示。
* `max_flow`:最大流,用邻接矩阵表示。
### 4.2 多分图匹配问题
**4.2.1 近似算法**
对于多分图匹配问题,目前没有已知的精确算法可以在多项式时间内解决。因此,通常采用近似算法来求解。
**最大加权匹配算法:**
该算法通过贪心策略,不断选择权重最大的匹配边,直到无法选择为止。虽然该算法不能保证找到最优解,但可以提供一个近似解。
**代码块:**
```python
def max_weight_matching(graph, weights):
"""
最大加权匹配算法求解多分图匹配问题。
参数:
graph: 多分图,用邻接矩阵表示。
weights: 边权重,用字典表示。
返回:
最大加权匹配。
"""
# 初始化匹配
matching = {}
# 对于每个顶点
for vertex in graph:
# 如果顶点未匹配
if vertex not in matching:
# 寻找权重最大的匹配边
max_weight = -1
max_weight_edge = None
for neighbor in graph[vertex]:
if (vertex, neighbor) not in matching and (neighbor, vertex) not in matching:
weight = weights[(vertex, neighbor)]
# 5. 网络流量优化与匹配问题的实战案例
### 5.1 某大型互联网公司的网络流量优化实践
**背景:**
某大型互联网公司面临着网络流量激增的问题,导致网络拥塞和用户体验下降。为了解决这一问题,该公司采用最大流问题优化网络流量。
**优化方案:**
1. **流量建模:**将网络抽象为一个有向图,其中节点代表路由器,边代表链路,边权重代表链路的带宽容量。
2. **最大流计算:**使用福特-福克森算法计算网络中的最大流,确定网络中可承载的最大流量。
3. **流量路由优化:**根据最大流结果,调整流量路由策略,将流量引导到容量较大的链路上,避免拥塞。
**效果:**
通过优化流量路由,该公司成功缓解了网络拥塞,提高了网络吞吐量,改善了用户体验。
### 5.2 某社交平台的匹配算法优化案例
**背景:**
某社交平台需要优化其匹配算法,以提高用户匹配的效率和准确性。该平台采用了最大流问题来解决匹配问题。
**优化方案:**
1. **二分图构建:**将用户抽象为二分图中的节点,将匹配关系抽象为边。
2. **最大匹配计算:**使用匈牙利算法计算二分图中的最大匹配,确定平台上可匹配的最大用户对数。
3. **匹配算法优化:**根据最大匹配结果,调整匹配算法,优先匹配与最多用户匹配的节点,提高匹配效率。
**效果:**
通过优化匹配算法,该社交平台提高了用户匹配的成功率,缩短了用户匹配的时间,增强了用户体验。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了最大流问题的基本概念和实战应用。从网络流基础到最大流优化,再到最小费用最大流和多商品流,专栏全面覆盖了最大流问题的各个方面。此外,还深入研究了网络流分解、多重源汇流、算法效率、图论中的网络流等拓展主题。专栏还提供了Python和C++实战指南,以及调试秘籍和性能优化策略。最后,专栏探讨了网络流在机器学习、决策优化、图像分割、文本分类和推荐算法等领域的广泛应用。通过深入浅出的讲解和丰富的实战示例,本专栏旨在帮助读者全面掌握最大流问题,并将其应用于实际问题解决中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【nlminb项目应用实战】:案例研究与最佳实践分享
# 1. nlminb项目概述
## 项目背景与目的
在当今高速发展的IT行业,如何优化性能、减少资源消耗并提高系统稳定性是每个项目都需要考虑的问题。nlminb项目应运而生,旨在开发一个高效的优化工具,以解决大规模非线性优化问题。项目的核心目的包括:
- 提供一个通用的非线性优化平台,支持多种算法以适应不同的应用场景。
- 为开发者提供一个易于扩展
【R语言Web开发实战】:shiny包交互式应用构建
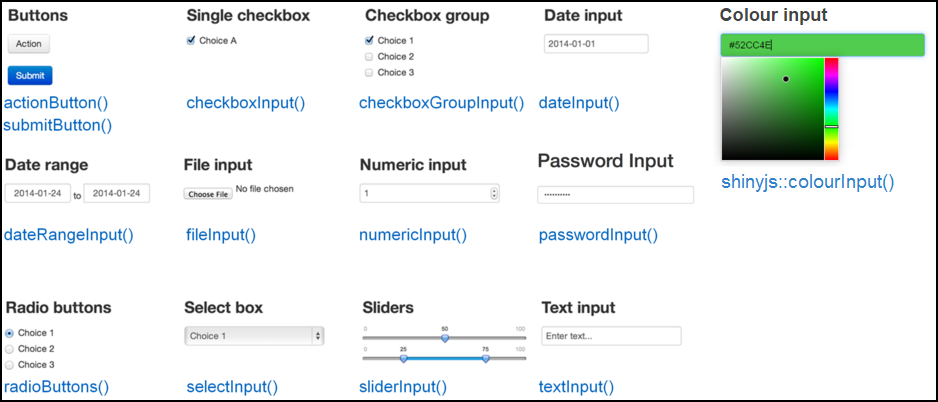
# 1. Shiny包简介与安装配置
## 1.1 Shiny概述
Shiny是R语言的一个强大包,主要用于构建交互式Web应用程序。它允许R开发者利用其丰富的数据处理能力,快速创建响应用户操作的动态界面。Shiny极大地简化了Web应用的开发过程,无需深入了解HTML、CSS或JavaScript,只需专注于R代码即可。
## 1.2 安装Shiny包
要在R环境中安装Shiny包,您只需要在R控制台输入以下命令:
```R
install.p
【R语言高级应用】:princomp包的局限性与突破策略

# 1. R语言与主成分分析(PCA)
在数据科学的广阔天地中,R语言凭借其灵活多变的数据处理能力和丰富的统计分析包,成为了众多数据科学家的首选工具之一。特别是主成分分析(PCA)作为降维的经典方法,在R语言中得到了广泛的应用。PCA的目的是通过正交变换将一组可
constrOptim在生物统计学中的应用:R语言中的实践案例,深入分析

# 1. constrOptim在生物统计学中的基础概念
在生物统计学领域中,优化问题无处不在,从基因数据分析到药物剂量设计,从疾病风险评估到治疗方案制定。这些问题往往需要在满足一定条件的前提下,寻找最优解。constrOptim函数作为R语言中用于解决约束优化问题的一个重要工具,它的作用和重
【R语言数据包性能监控实战】:实时追踪并优化性能指标

# 1. R语言数据包性能监控的概念与重要性
在当今数据驱动的科研和工业界,R语言作为一种强大的统计分析工具,其性能的监控与优化变得至关重要。R语言数据包性能监控的目的是确保数据分析的高效性和准确性,其重要性体现在以下几个方面:
1. **提升效率**:监控能够发现数据处理过程中的低效环节,为改进算法提供依据,从而减少计算资源的浪费。
2. **保证准确性**:通过监控数据包的执行细节,可以确保数据处理的正确性
R语言lme包深度教学:嵌套数据的混合效应模型分析(深入浅出)

# 1. 混合效应模型的基本概念与应用场景
混合效应模型,也被称为多层模型或多水平模型,在统计学和数据分析领域有着重要的应用价值。它们特别适用于处理层级数据或非独立观测数据集,这些数据集中的观测值往往存在一定的层次结构或群组效应。简单来说,混合效应模型允许模型参数在不同的群组或时间点上发生变化,从而能够更准确地描述数据的内在复杂性。
## 1.1 混合效应模型的
【R语言数据包开发手册】:从创建到维护R语言包的全方位指导

# 1. R语言包开发概述
## 1.1 R语言包的意义与作用
R语言作为一种流行的统计编程语言,广泛应用于数据分析、机器学习、生物信息等领域。R语言包是R的核心组件之一,它通过封装算法、数据、文档和测试等,使得R用户能够方便地重复使用和共享代码。R包的开发对推动R语言的普及和技术进步起着至关重
【R语言高性能计算】:并行计算框架与应用的前沿探索

# 1. R语言简介及其计算能力
## 简介
R语言是一种用于统计分析、图形表示和报告的编程语言和软件环境。自1993年问世以来,它已经成为数据科学领域内最流行的工具之一,尤其是受到统计学家和研究人员的青睐。
## 计算能力
R语言拥有强大的计算能力,特别是在处理大量数据集和进行复杂统计分析
空间数据分析与Rsolnp包:地理信息系统(GIS)集成指南
# 1. 空间数据分析基础
空间数据分析是地理信息系统(GIS)不可或缺的一部分,其核心在于理解数据结构、处理流程及分析方法,为数据挖掘与决策支持提供基石。接下来,让我们一步步揭开空间数据分析的神秘面纱。
## 1.1 空间数据的概念及其重要性
空间数据指的是带有地理参照系统的信息,记录了地球表面物体的位置、形
生物信息学中的solnp包:案例研究与应用策略

# 1. solnp包在生物信息学中的应用概述
生物信息学作为一门交叉学科,近年来迅猛发展,在基因组学、蛋白质组学、药物设计等领域扮演着越来越重要的角色。随着生物信息学数据规模的不断扩大和复杂度的增加,对算法和软件工具的要求也在不断提高。solnp包作为一种先进的优化算法工具,其在处理大规模生物
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )