【FreeRTOS高级特性】:消息队列与事件组的应用与实践精讲
发布时间: 2025-01-07 01:39:18 阅读量: 10 订阅数: 18 

NXP i.MX RT1052 FreeRTOS实战:消息队列
# 摘要
本文介绍了FreeRTOS中消息队列与事件组的结构、工作原理和高级应用,重点分析了它们在实时操作系统中的角色和重要性。通过对消息队列和事件组的数据结构、工作原理、应用场景以及同步机制的深入探讨,本文旨在为开发者提供更高效的使用方法和调试技巧。同时,通过实践案例的精讲,本文详细说明了在具体项目中实现和调试这两种通信机制的过程。最后,本文提出了一系列针对消息队列与事件组的性能优化策略,并通过案例分析验证了这些优化措施的有效性,以期达到提高系统性能和响应速度的目标。
# 关键字
FreeRTOS;消息队列;事件组;任务同步;性能优化;实践应用
参考资源链接:[FreeRTOS实时内核实战指南:入门无水印版](https://wenku.csdn.net/doc/6412b727be7fbd1778d4946e?spm=1055.2635.3001.10343)
# 1. FreeRTOS消息队列与事件组简介
FreeRTOS作为一个流行和广泛使用的实时操作系统(RTOS),提供了多种同步机制来管理任务和资源。消息队列和事件组是其中两个重要的通信机制。消息队列允许任务之间通过先进先出(FIFO)的方式传递数据,而事件组则允许任务在不发送实际数据的情况下同步彼此的状态。这两种机制在任务间通信和同步中发挥着不可或缺的作用。
## 1.1 消息队列的基本概念
消息队列是一个用于存储来自任务或中断服务例程(ISR)的消息的先进先出队列。它在处理任务间数据流传输方面特别有用。消息队列可以看作是系统中的一个"缓冲区",在不同任务之间提供一个中介,从而避免了直接的依赖关系。
## 1.2 事件组的基本概念
事件组允许任务同步它们的状态或条件,它包含一系列的标志位,每个任务可以设置或清除这些标志位来指示特定事件的发生。事件组非常适合于实现基于事件的同步,因为它能够以非常低的开销来管理任务间复杂的依赖关系。
在接下来的章节中,我们将深入探讨这些机制的理论基础、应用场景以及在实际项目中的应用和优化策略。这将帮助开发者更加高效地利用FreeRTOS提供的工具,创建出健壮、高效的实时应用。
# 2. 消息队列与事件组的理论基础
## 2.1 消息队列的工作原理
### 2.1.1 消息队列在RTOS中的角色
在实时操作系统(RTOS)中,消息队列是一个核心组件,它允许不同的任务(线程)之间进行数据交换。消息队列的主要职责是将来自一个任务或中断服务例程(ISR)的消息传递给一个或多个等待接收消息的任务。这种机制为基于事件的数据传输提供了一个同步点,这对于实时性要求较高的系统来说至关重要。
消息队列通常在以下几个方面发挥作用:
- **异步通信**:任务之间可以独立运行,通过消息队列进行异步通信,避免了直接依赖和同步调用的风险。
- **解耦**:将消息的发送者和接收者解耦,增加系统的模块化和可维护性。
- **缓冲机制**:消息队列提供了数据缓冲,任务可以发送消息而不必立即处理响应,也可以在任何时间点接收消息。
### 2.1.2 消息队列的数据结构与存储机制
消息队列由一系列的数据结构组成,每个消息通常包含数据本身以及可能附加的控制信息。在FreeRTOS中,消息队列通常以链表的形式实现,以处理不定量的消息和大小。
消息队列的关键存储机制如下:
- **静态内存**:在编译时分配固定大小的内存块,适用于内存大小可预测且消息长度统一的场景。
- **动态内存**:在运行时动态分配内存,提供了更高的灵活性,适用于消息长度不一的情况。
在设计消息队列时,需要考虑以下因素:
- **队列长度**:决定可以存储多少消息。
- **消息大小**:决定单个消息的最大长度。
- **内存管理**:选择静态或动态内存管理方式。
下面是一个简单的FreeRTOS消息队列的定义和初始化代码示例:
```c
#include "FreeRTOS.h"
#include "queue.h"
// 创建一个消息队列
QueueHandle_t xQueue;
void vATaskFunction( void *pvParameters )
{
// 初始化消息队列,队列长度为 10,每个消息大小为 unsigned int
xQueue = xQueueCreate( 10, sizeof( unsigned int ) );
// 消息队列初始化成功
if( xQueue != NULL )
{
// 队列已创建,任务可以继续后续操作
}
}
```
在上述代码中,`xQueueCreate`函数创建了一个长度为10的消息队列,每个消息的类型是`unsigned int`。成功创建后,任务可以使用此队列发送和接收消息。
## 2.2 事件组的工作原理
### 2.2.1 事件组在任务同步中的应用
事件组是FreeRTOS提供的另一种同步机制,它允许任务基于事件标志的集合进行同步。与消息队列相比,事件组可以更高效地处理多个事件的同步,因为它使用单一的内存对象代替了多个消息的队列。
事件组的关键优势包括:
- **低内存占用**:不需要为每个事件或消息分配单独的内存空间。
- **快速同步**:事件集的设置和清除操作速度较快,适用于需要快速响应的任务同步。
- **灵活的事件管理**:可以独立处理多个不同的事件标志。
### 2.2.2 事件标志的设定与清除机制
事件组通过位标志来表示不同的事件。每个事件标志对应于二进制位的集合中的一个位。任务可以设置(set)、清除(clear)或等待(wait)一个或多个事件标志。
事件标志的设定与清除机制通常涉及以下操作:
- **设定(Set)事件标志**:将特定的事件标志设置为1,表示发生了相应的事件。
- **清除(Clear)事件标志**:将事件标志设置为0,表示该事件不再被关注或已经处理。
- **等待(Wait)事件标志**:任务可以等待一个或多个事件标志变为设定状态。等待可以是阻塞的,也可以是非阻塞的,允许任务在事件未发生时继续执行其他操作。
下面是一个示例代码,展示如何使用事件组进行任务同步:
```c
#include "FreeRTOS.h"
#include "event_groups.h"
// 创建一个事件组
EventGroupHandle_t xEventGroup;
void vTaskFunction( void *pvParameters )
{
EventBits_t uxBits;
// 创建事件组,最大事件标志为 8
xEventGroup = xEventGroupCreate();
// 如果事件组创建成功
if( xEventGroup != NULL )
{
// 任务执行其他操作
// ...
// 等待事件组中的第一个事件标志被设置
uxBits = xEventGroupWaitBits( xEventGroup, 1, pdTRUE, pdTRUE, portMAX_DELAY );
if( ( uxBits & ( 1 << 0 ) ) != 0 )
{
// 第一个事件标志已被设置,执行相关操作
}
}
}
```
在此示例中,`xEventGroupCreate` 创建了一个事件组,`xEventGroupWaitBits` 函数用于等待第一个事件标志的设置。如果标志被设置(即该事件发生),则任务将执行相应的操作。`pdTRUE` 参数表示如果相应的标志被清除,则需要重新获取该标志。
总结本章节内容,消息队列和事件组在RTOS中扮演着至关重要的角色,它们不仅实现了任务之间的数据交换和同步,还通过不同的数据结构和操作机制提供了灵活的通信手段。下一章,我们将深入探讨消息队列与事件组的应用场景、高级应用以及它们在实践中如何实现和调试。
# 3. 消息队列与事件组的高级应用
在深入探讨FreeRTOS的消息队列与事件组的高级应用前,需掌握这两个组件的理论基础。一旦我们理解了消息队列如何在RTOS中管理和传递数据,以及事件组如何控制任务间的同步和通信,我们就能开始探索它们的高级应用。
## 3.1 消息队列的应用场景分析
### 3.1.1 数据流处理
消息队列非常适合用于处理数据流。数据流可以来自不同的源,如传感器输入、网络包、文件读取等。数据流处理的场景要求实时性,必须保证数据能够按照其到达的顺序被处理。在RTOS中,数据流处理可以通过创建多个任务来实现,每个任务处理一个特定的任务,如数据采集、数据转换、数据存储等。消息队列在这里扮演了重要角色,它负责在这些任务之间安全地传递数据。
**代码块展示:**
```c
#define QUEUE_LENGTH 10
#define ITEM_SIZE sizeof( DataStruct )
QueueHandle_t xQueue;
void vDataProducerTask( void *pvParameters )
{
DataStruct data;
while(1) {
// 获取数据,可能通过I/O操作,例如ADC读取或传感器数据采集
getData(&data);
// 将数据发送到队列中,无需等待任务空闲即可返回
if(xQueueSendToBack(xQueue, &data, ( TickTyp
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《FreeRTOS入门手册》提供了一系列深入且全面的指南,涵盖了FreeRTOS实时操作系统的各个方面。从基础概念到高级特性,该手册提供了对任务管理、内存管理、信号量、队列、定时器、堆栈分析、安全机制、源码解析、跨平台移植、事件标志组和堆管理等主题的透彻理解。无论是初学者还是经验丰富的开发人员,该手册都是了解和掌握FreeRTOS的宝贵资源。它提供了清晰的解释、丰富的示例和实用的技巧,帮助读者充分利用FreeRTOS的强大功能,开发高效、可靠的嵌入式系统。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
精通IAR:项目设置与优化:从入门到精通的完整指南
# 摘要
本文提供了对IAR嵌入式工作台项目设置的全面概述,从基本的配置选项到高级优化技巧,涵盖了从项目创建到调试和性能分析的每个阶段。通过详尽的参数解析,包括编译器、链接器选项和调试器设置,以及对代码优化、版本控制和项目管理的深入讨论,本文旨在为开发者提供一套完整的IAR项目管理解决方案。此外,本文还探讨了系统级功能集成和高级优化技巧,如编译器优化级别、并行开发策略以及并行开发的最佳实践,确保项目在不同应用环境下的高效执行和优化。最后,通过具体案例研究,本文展示了如何将理论应用于工业控制、消费电子和物联网项目中,突出在安全性、低功耗设计和实时系统集成方面的最佳实践。
# 关键字
IAR项目
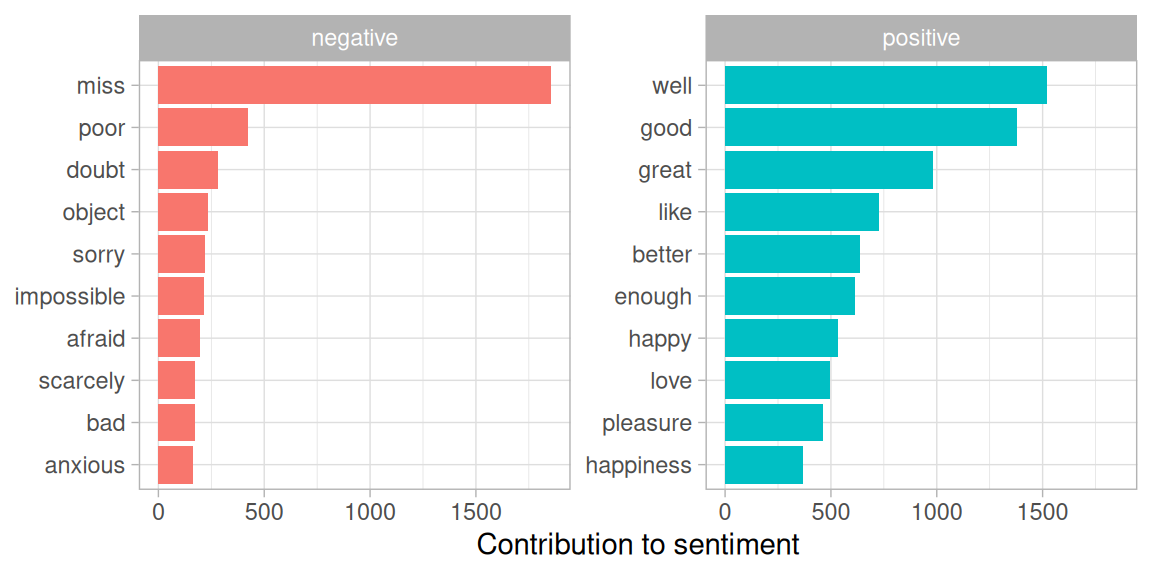
Stata高级文本分析:5种统计方法深度挖掘数据价值
# 摘要
本文旨在为初学者提供Stata软件在文本分析中的入门指南,并深入探讨统计方法的理论与应用。首先介绍了Stata文本分析的基本概念,随后详细阐述了描述性统计、回归分析和时间序列分析的理论基础及其在文本分析中的关键应用。接着,文章转向高级统计技术,包括面板数据分析、离散选择模型和数据降维技术,以及它们在文本分析中的实践。第四章专注于Stata在文本分析
黑苹果BIOS调试秘籍:启动失败故障点全面排查技巧
# 摘要
本文深入探讨了黑苹果系统(指在非苹果硬件上安装的macOS系统)的启动流程,特别是从BIOS配置到启动失败故障排查的全过程。通过详细阐述BIOS基础、配置、安全特性以及故障诊断的重要性,本文为读者提供了一系列硬件兼容性检查、BIOS设置调整和驱动问题解决的实用技巧。同时,结合真实案例分析,本文不仅揭示了黑苹果启动失败的常见故障点,还提出了基于实践的高级BI
【视觉冲击力提升术】:AE动效设计的5大创意技巧

# 摘要
本文探讨了AE(Adobe After Effects)软件在动效设计中创造视觉冲击力的策略与技巧。文章首先概述了AE动效设计的视觉冲击力,随后详细分析了视觉元素的创新应用,包括色彩和光影的搭配,形状与构图的创意技巧。接着,探讨了动态元素的融合,如动画关键帧的玩法和特效与过渡的应用方法。文章进一步深
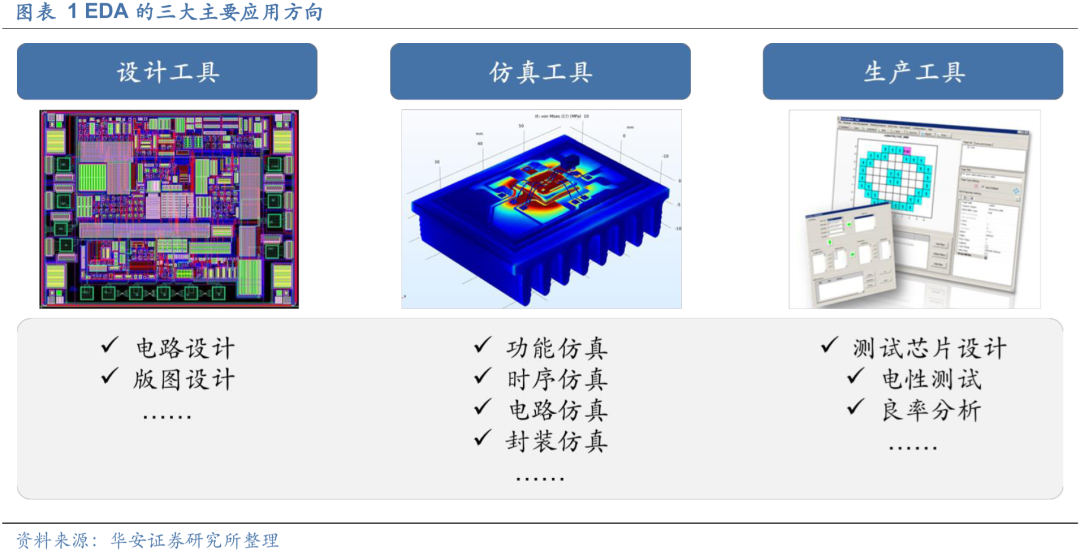
【电子设计自动化(EDA)工具应用全攻略】:数字电路设计实战秘籍
# 摘要
电子设计自动化(EDA)工具在现代电路设计领域扮演着关键角色,提供了从概念到实现的完整设计流程支持。本文首先概览了EDA工具的发展历史和基本功能,然后深入探讨了数字电路设计的基础理论和规范化流程,涵盖了数字逻辑基础、集成电路与仿真,以及设计的标准化方法。进一步地,文章详细介绍了EDA工具的操作实践,包括
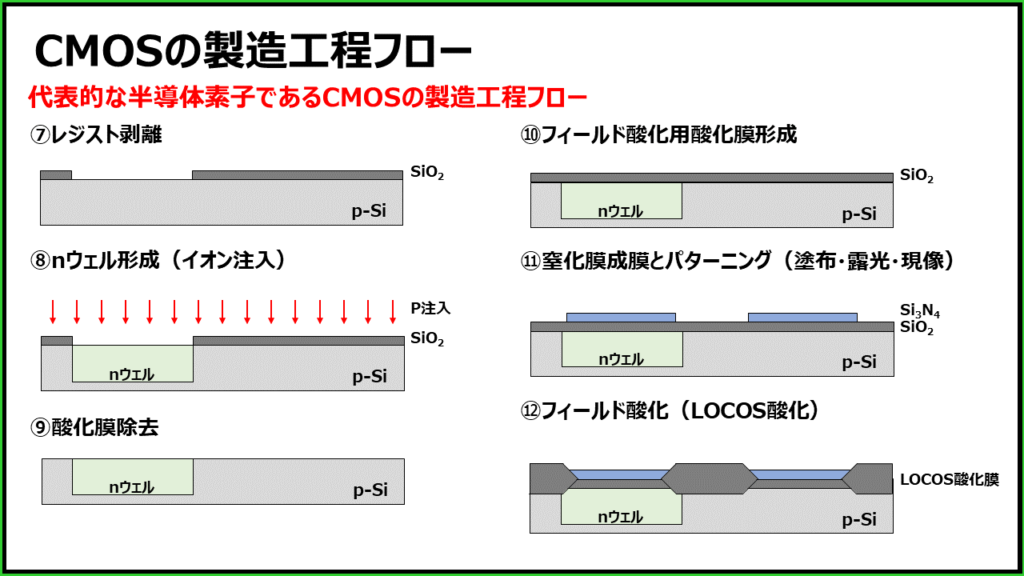
版图设计进阶秘籍:如何将PMOS-CMOS集成电路性能提升至极致
# 摘要
本文系统地分析了PMOS-CMOS集成电路的基础原理和性能提升理论,探讨了关键性能指标的定义与度量,以及优化理论和设计原则。文中还涉及了新型半导体材料的应用、先进制造工艺的影响、电路仿真与分析技术的应用,以及在设计、制造和测试阶段提升电路性能的实践方法。进一步地,文章讨论了PMOS-CMOS集成电路在高性能计算、低功耗和系统集成方面的
音乐和视频管理秘笈:iTunes库管理的6大高效技巧

# 摘要
随着数字媒体内容的日益增长,有效管理iTunes库成为用户面临的重要任务。本文系统地探讨了iTunes库的管理和优化方法,包括库结构的理解、内容的组织、自动化管理、高级搜索技巧、性能优化以及故障排除。特别强调了使用脚本自动化日常任务的高效性,以及搜索和筛选技巧在快速定位媒体内容中的重要性。此外,文章还提出了智能管理的未来趋势,例如集成AI推荐系统和第三方库管理
【MATLAB对比分析】:圆柱螺线与圆锥螺线的三维图形绘制技巧
# 摘要
本文首先回顾了MATLAB的基础知识,为后续图形绘制打下基础。接着详细探讨了圆柱螺线与圆锥螺线的数学理论,并介绍了它们在MATLAB中的基本及高级三维图形绘制技巧。文章通过对绘制方法、颜色与线型定制、光照和材质效果的分析,展示了如何使用MATLAB更生动和专业地表现这些螺线。此外,通过对比分析圆柱螺线与圆锥螺线的形态特征、编程实现及应用场景,本文提供了一个全面
FDC2214设备安装全解:一步步带你轻松搞定调试

# 摘要
本文系统地介绍了FDC2214设备的安装、配置、功能测试、调试技术以及应用案例分析,并提供了维护与升级的详尽指南。首先,文章概述了FDC2214设备的基本信息,并强调了安装前的准备工作。接着,详细介绍了设备的物理连接、软件安装与初始化,同时提供了连接问题的排查与解决策略。在功能测试与验证部分,重点阐述了测试环境搭建、
【自动泊车故障不再怕】:诊断与维修的终极指南
# 摘要
本文全面介绍了自动泊车技术的发展概况、系统组成、工作原理以及常见的故障诊断和维修方法。通过对关键组件的功能分析和系统工作流程的解析,本文进一步探讨了自动泊车系统的故障代码解读、诊断工具的使用和常见故障的识别与处理。文章还强调了预防性维护的重要性,包括定期检查和系统性能优化的实施步骤。通过案例分析和实战技巧的分享,本文旨在提供实用的维修策略和快速处理现场问题的方法,为自动泊车系统的开发和维护提供了全面的技术支持和参考。
# 关键字
自动泊
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )