探索数据的新维度:使用Anaconda进行【3D数据可视化】
发布时间: 2024-12-09 21:54:12 阅读量: 12 订阅数: 20 

Python数据可视化课后习题_答案.docx
# 1. 3D数据可视化的基础概念
## 3D数据可视化的定义
3D数据可视化是将数据转换为三维空间中的几何形体,使得复杂数据集的特性和模式变得直观和易于理解。它不仅仅是二维图表的升级,而是一种全新的信息表示方式,可以帮助人们以更加直观的方式来解读数据。
## 3D可视化的重要性
相较于二维可视化,3D可视化技术能够更好地展示数据的空间关系、多维数据间的相互作用以及数据的时间序列变化。在工程、科学计算、医疗图像处理等领域,3D可视化可以帮助专业人士做出更准确的分析和决策。
## 3D数据可视化的组成部分
在3D数据可视化中,主要涉及以下几个核心组成部分:数据源、数据处理、可视化算法、交互技术以及呈现方式。数据源为可视化提供原始信息;数据处理是将原始数据转换为可视化可用的格式;可视化算法负责生成3D图形;交互技术使得用户可以探索和理解数据;而呈现方式则决定了数据以何种形式展现给用户。
# 2. Anaconda环境下的3D可视化工具
### 2.1 Anaconda简介及安装
#### 2.1.1 Anaconda的定义和功能
Anaconda是一个开源的Python发行版本,它适用于大规模数据处理、预测分析和科学计算。Anaconda通过其包管理器conda,方便用户在操作系统上安装、运行和升级成千上万的软件包和依赖项。Anaconda特别适合数据科学家和开发人员,因为它允许快速部署、管理环境和执行并行计算,是进行数据科学和机器学习项目的理想选择。
#### 2.1.2 安装Anaconda和管理环境
安装Anaconda通常很直接。访问Anaconda的官方网站下载适合您操作系统的安装文件,然后运行安装向导即可。Anaconda安装后,可以利用conda命令管理独立的Python环境,以便在多个项目之间切换,不会相互影响。
创建一个新的环境可以使用以下命令:
```shell
conda create -n myenv python=3.8
```
激活环境:
```shell
conda activate myenv
```
列出所有环境:
```shell
conda info --envs
```
删除环境:
```shell
conda remove --name myenv --all
```
conda环境管理使得我们可以针对不同的项目需求定制Python及其库的版本,极大地方便了3D可视化工具的开发和使用。
### 2.2 常用的3D可视化库介绍
#### 2.2.1 matplotlib的3D模块
matplotlib是一个用于创建静态、交互式和动画可视化的Python库。它的3D模块使得用户可以轻松地创建3D图表,包括散点图、线图、曲面图等。
matplotlib 3D模块的使用示例:
```python
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# 绘制散点图
ax.scatter([1, 2, 3], [1, 2, 3], [1, 2, 3])
plt.show()
```
在上面的代码中,我们首先导入了matplotlib.pyplot和Axes3D模块,创建了一个带有3D投影的子图,并使用scatter方法绘制了一个简单的3D散点图。
#### 2.2.2 Mayavi库的特点和应用
Mayavi是一个用于2D和3D科学数据可视化的库,它支持复杂的可视化需求,如体绘制、等值面绘制和流线绘制等。Mayavi的特点在于其强大的可视化能力,尤其适合科学数据的复杂可视化需求。
Mayavi使用示例:
```python
from mayavi import mlab
import numpy as np
x, y, z = np.ogrid[-10:10:100j, -10:10:100j, -10:10:100j]
s = np.sin(x*y*z)/(x*y*z)
mlab.figure(bgcolor=(1, 1, 1))
mlab.contour3d(s, contours=10, opacity=0.5)
mlab.show()
```
以上代码展示了Mayavi如何绘制一个由正弦函数定义的三维等值面。
#### 2.2.3 Plotly的3D图表制作
Plotly是一个创建交互式图表和数据可视化的开源工具。其Python库Plotly允许用户创建精美的3D图表,并通过网页浏览器进行交互。
Plotly制作3D散点图的示例:
```python
import plotly.graph_objs as go
import plotly.offline as py
data = [go.Scatter3d(
x=[1, 2, 3],
y=[1, 2, 3],
z=[1, 2, 3],
mode='markers',
marker=dict(
size=10,
color='rgb(255,0,0)', # 红色
)
)]
layout = go.Layout(margin=dict(l=0, r=0, b=0, t=0))
fig = go.Figure(data=data, layout=layout)
py.plot(fig, filename='3d-scatter-colors')
```
这段代码展示了如何使用Plotly创建一个简单的3D散点图,并且输出为一个可交互的网页文件。
### 2.3 3D可视化工具的集成
#### 2.3.1 Jupyter Notebook中的3D可视化集成
Jupyter Notebook是一个开源Web应用程序,允许用户创建和共享包含实时代码、方程、可视化和叙述性文本的文档。Jupyter Notebook支持多种编程语言,对于数据科学家而言,它是一个强大的工具,可以让3D可视化变得非常直观。
集成3D可视化到Jupyter Notebook中涉及加载适当的库,并直接在Notebook中展示3D图表。以matplotlib为例,我们可以像在常规Python脚本中一样导入matplotlib库,并在Notebook的单独代码块中创建3D图形。
#### 2.3.2 3D可视化库之间的交互和比较
在选择3D可视化库时,重要的是了解每个库的优缺点以及它们在不同场景下的适用性。matplotlib适合初学者和简单的可视化需求,而Mayavi和Plotly则更适合复杂和高级的可视化。
- matplotlib适合创建静态图像,如报告和出版物中使用的图形。
- Mayavi更擅长复杂的科学可视化,尤其是在处理体数据和流场数据时。
- Plotly则在创建交云动式图形和Web部署方面具有优势。
比较表格如下:
| 特性 | matplotlib | Mayavi | Plotly |
| ---- | ---- | ---- | ---- |
| 功能丰富度 | 适合基本图表 | 高级科学可视化 | 高度交互式可视化 |
| 3D图表类型 | 有限的3D支持 | 多样的3D数据表现 | 丰富的3D图表选项 |
| 性能 | 较好 | 优异 | 依赖网络 |
| 交互性 | 静态 | 静态和部分交互 | 完全交互 |
| 网络应用 | 不支持 | 不支持 | 支持 |
通过比较,开发者可以根据项目的具体需求来选择最合适的工具进行3D可视化开发。
# 3. 3D数据可视化的实践应用
## 3.1 数据预处理和3D模型创建
### 3.1.1 数据清洗和格式化
数据可视化的过程往往始于数据的预处理阶段,而预处理的第一步便是数据清洗。在3D数据可视化中,数据清洗尤为重要,因为3D模型的准确度高度依赖于原始数据的质量。在清洗数据时,我们会关注以下几个方面:
- 去除重复数据:确保每个数据点都是独特的,这对于3D模型的构建至关重要。
- 填补或删除缺失值:在3D模型中,缺失的数据点会导致模型的不完整或失真,因此需要通过预测或舍弃的方式处理这些值。
- 数据标准化:保证数据集中的数据具有相同的尺度,以便它们可以在3D空间中正确地展示。
- 去除异常值:异常值可能会扭曲模型,需要通过统计方法识别和处理。
完成以上步骤后,我们将数据转换成适合3D可视化的格式。常用的格式有OBJ、STL、3DS等,这些格式可以被多种3D建模工具识别和处理。
### 3.1.2 从2D到3D的转换方法
将2D数据转换为3D模型是一个涉及多个步骤的过程。一个常见的方法是通过图像识别和深度学习技术来重建3D模型。这个过程可以分为以下几个步骤:
- 特征点提取:从2D图像中识别出特征点,如角点、边缘等。
- 深度估计:利用立体匹配或其他深度估计技术来估计每个特征点的深度信息。
- 点云生成:将具有深度信息的特征点组合成点云。
- 点云处理:进行点云的平滑、去噪、细化等操作。
- 网格生成:将处理好的点云转换成网格模型,常使用如Marching Cubes算法。
这一系列操作可以通过多个软件工具和编程库来完成,例如OpenCV、PCL、MeshLab等。
```python
import open3d as o3d
import numpy as np
import cv2
# 读取图片
img = cv2.imread("image.jpg")
# 特征点提取等操作...
# 假设我们已经获得了特征点和深度信息
feature_points = np.array([[1, 2, 3], [4, 5, 6], ...])
depth_info = np.array([1, 2, 3, ...])
# 创建点云
point_cloud = o3d.geometry.PointCloud()
point_cloud.points = o3d.utility.Vector3dVector(feature_points)
# 进一步处理点云...
# 生成网格模型
# 注意:这里只是简单演示代码结构,实际的转换过程要复杂得多。
网格模型 = o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(point_cloud)
o3d.visualization.draw_geometries([网格模型])
```
请注意,上述代码仅作为概念演示,实际转换过程中还需要考虑很多细节,例如正确的单位转换、调整网格模型的分辨率等。
## 3.2 3D数据点的可视化
### 3.2.1 点云的3D展示技巧
点云是3D数据可视化中一个非常重要的部分,它代表了一系列的点,这些点在三维空间中的位置就是我们所要表达的信息。为了更有效地展示点云,我们需要采用一

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏重点介绍了 Anaconda 数据可视化工具,旨在帮助数据分析师和可视化专家充分利用其功能。专栏涵盖了广泛的主题,包括使用 Seaborn 绘制统计图表、整合多个图表以讲述数据故事、使用 Plotnine 创建 ggplot2 风格图表、利用 Datashader 增强视觉效果、从 Pandas 到 Altair 的无缝转换策略、使用 FacetGrid 展示多变量数据、创建响应式图表和仪表盘、进行 3D 数据可视化以及可视化时间序列分析。通过这些文章,读者可以深入了解 Anaconda 数据可视化工具,并学习如何有效地使用它们来获得有意义的数据洞察力。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Fluent透明后处理全解析】:揭开渲染神秘面纱,实现完美透明效果
参考资源链接:[fluent透明后处理](https://wenku.csdn.net/doc/6412b79cbe7fbd1778d4ae8f?spm=1055.2635.3001.10343)
# 1. Fluent透明后处理概述
在数字艺术和计算机图形学领域,透明效果的后处理是增强视觉表现力的关键技术之一。Fluent透明后处理正是在此背景下应运而生,它不仅仅是一
Python数据与变量全攻略:深入浅出的处理方法
参考资源链接:[Python3.5基础课件:282页全览,从入门到安装详解](https://wenku.csdn.net/doc/2b9kyex4xy?spm=1055.2635.3001.10343)
# 1. Python数据与变量基础
Python语言以其简洁易学而著称,它是数据科学和分析的首选工具。在开始深入探讨Python之前,我们需要掌握一些基础概念,特别是数据与变量。
首先,
【iSecure Center用户权限管理】:细粒度权限控制的5大最佳实践
参考资源链接:[iSecure Center-Education 安防平台V1.4.100:详尽安装与部署指南](https://wenku.csdn.net/doc/g8ra44kisz?spm=1055.2635.3001.10343)
# 1. 细粒度权限控制
【Nessus 6.3高级漏洞管理秘籍】:深度挖掘漏洞报告,优化安全策略,提升网络防护
参考资源链接:[Nessus 6.3中文版用户指南:全面升级与关键特性](https://wenku.csdn.net/doc/6412b782be7fbd1778d4a8e3?spm=1055.2635.3001.10343)
# 1. N
精通版图验证原理:Cadence后端实验的权威进阶教程
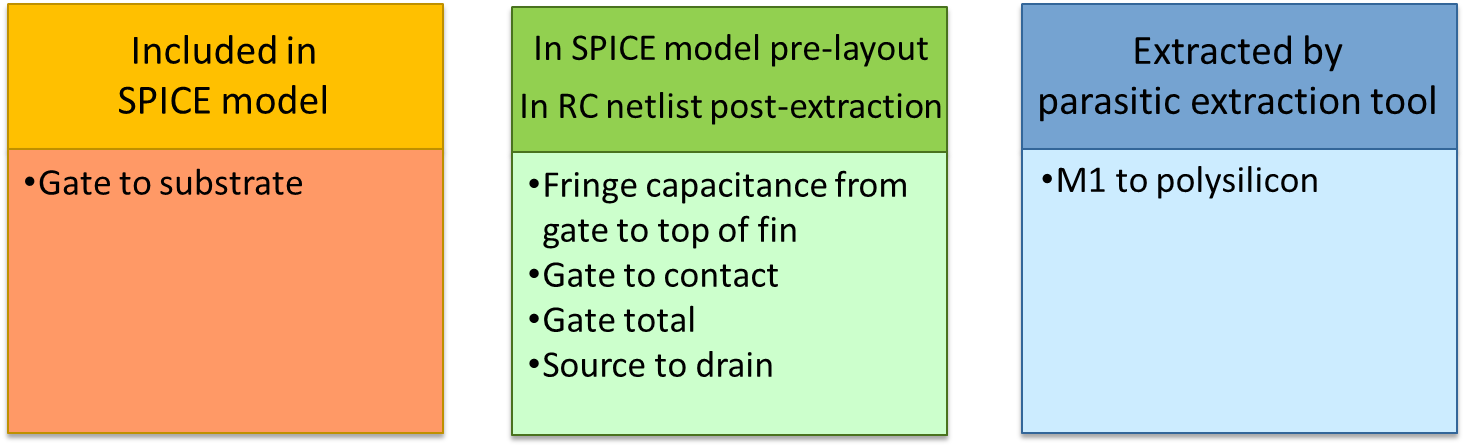
参考资源链接:[Cadence Assura版图验证全面教程:DRC、LVS与RCX详解](https://wenku.csdn.net/doc/zjj4jvqsmz?spm=1055.2635.3001.10343)
# 1. 版图验证基础概念
## 1.1 版图验证的定义和目的
版图验证是集成电路设计流程中的关键步骤,它的
【CMOS电路故障诊断】:3步骤,有效识别和修复设计缺陷
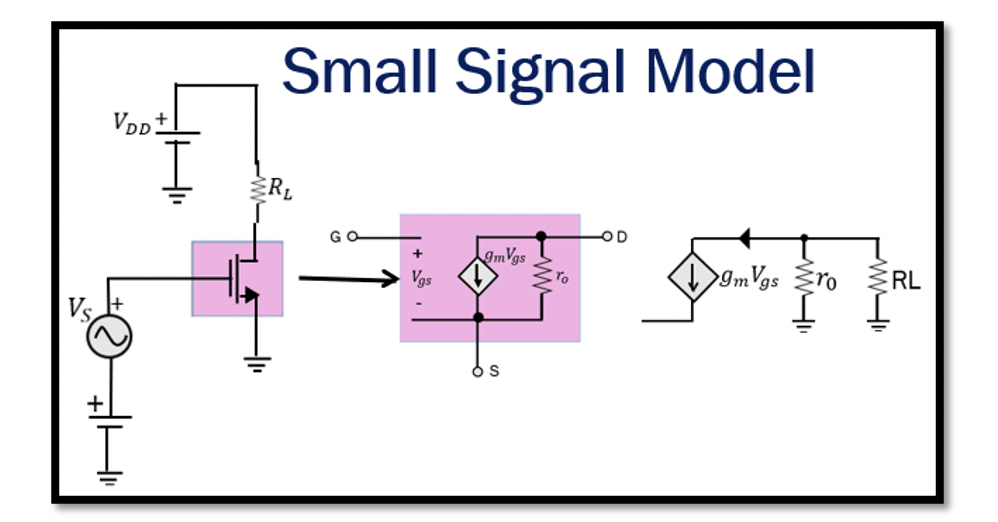
参考资源链接:[CMOS模拟集成电路设计(Allen )课后习题解答](https://wenku.csdn.net/doc/6412b6f8be7fbd1778d48a01?spm=1055.2635.3001.10343)
# 1. CMOS电路故障诊断概述
随着电子技术的快速发展,CMOS电路在现代电子系统中的应用变得日益广泛。CMOS电路因其低功耗、高速
RTKLIB 2.4.2界面与操作流程:详尽解析手册

参考资源链接:[RTKLIB v2.4.2中文手册:全球导航卫星系统的精准定位](https://wenku.csdn.net/doc/6401ac
性能调优大揭秘:达梦数据库环境下Activiti工作流引擎的终极优化指南

参考资源链接:[Activiti二次开发:适配达梦数据库的详细教程](https://wenku.csdn.net/doc/6412b53fbe7fbd1778d42781?spm=1055.2635.3001.10343)
# 1. 性能调优概述与准备工作
在现代软件开发与运维领域,性能调优扮演着至关重要的角色。它不仅确保应用能够稳定运
【MSP430到MSPM0迁移必读】:一站式迁移指南与实用技巧
参考资源链接:[MSP430到MSPM0迁移指南:软件移植与硬件适应](https://wenku.csdn.net/doc/7zqx1hn3m8?spm=1055.2635.3001.10343)
# 1. MSP430与MSPM0平台概述
MSP430和MSPM0是德州仪器(Texas Instruments)推出的两个系列微控制器,广泛应用于嵌入式系统设计。M
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )