音乐跑马灯性能与用户体验提升:51单片机性能优化实战指南
发布时间: 2024-11-16 12:47:07 阅读量: 2 订阅数: 5 
# 1. 51单片机与音乐跑马灯简介
## 1.1 51单片机的入门应用
51单片机是电子爱好者和工程师们常用的微控制器之一,它具备灵活性高、成本低、易于编程等特点,广泛应用于教学、实验、工业控制和小型电子项目中。对于初学者来说,51单片机是一个学习硬件编程、了解微控制器工作原理的优秀平台。
## 1.2 音乐跑马灯的概念和用途
音乐跑马灯是一个将声音信号与LED灯显示效果结合起来的创意装置,它可以根据播放音乐的节奏和强度,控制LED灯的闪烁、颜色变换和动态显示效果。该装置不仅用于娱乐场景,如音乐节、迪厅等,还可以应用于教育、宣传和智能家居系统中,提升用户交互体验。
## 1.3 为什么选择51单片机作为音乐跑马灯的控制核心
选择51单片机作为控制核心的原因在于它的性价比高,且拥有丰富的开发资源和社区支持。它能够处理音乐信号,并与LED灯进行有效配合,实现复杂且美观的跑马灯效果。对于初学者来说,51单片机的门槛相对较低,易于快速上手,而且系统足够稳定,适合完成从简单到复杂的音乐跑马灯项目。
通过本章内容的介绍,我们为读者建立了一个对51单片机和音乐跑马灯的基础认识,为后续章节深入学习硬件设计与软件编程打下基础。接下来,我们将探讨音乐跑马灯的硬件组成及其工作原理,为读者展示如何将理论知识应用于实践之中。
# 2. 音乐跑马灯的硬件组成和基本原理
### 2.1 51单片机概述
#### 2.1.1 51单片机的特点和应用
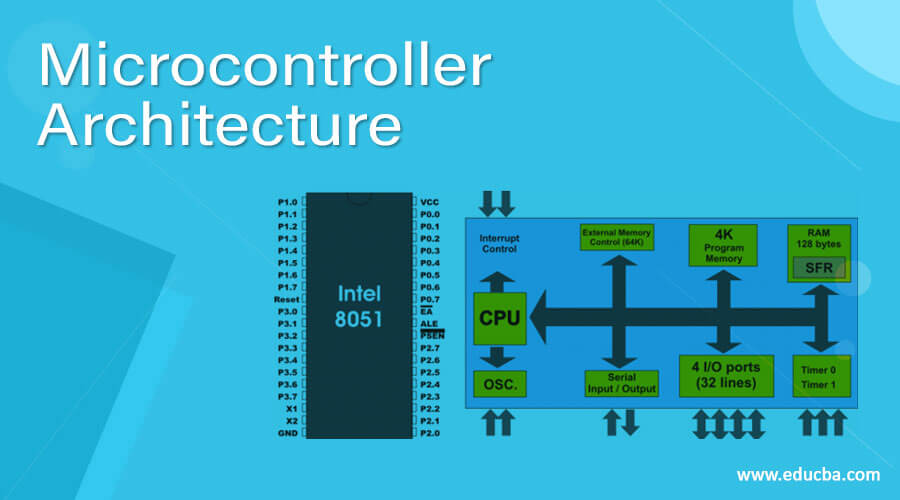
51单片机是基于Intel 8051架构的微控制器,它被广泛用于嵌入式系统开发。其特点包括简单易用、成本低廉、内核稳定可靠,以及拥有丰富的外设接口。它适合用于学习和原型制作,同时也是工业控制、家用电器、玩具制造等领域的首选微控制器之一。
#### 2.1.2 51单片机的核心组成
51单片机的核心组成部分包括中央处理单元(CPU)、存储器、I/O端口、计时器、串行通信接口、中断系统和片上外围设备等。其中,CPU负责执行指令,存储器包括程序存储器(ROM)和数据存储器(RAM),I/O端口用于与外界进行数据交换,计时器用于执行定时和计数任务,串行通信接口则提供与其他设备的通信能力。
### 2.2 音乐跑马灯硬件结构
#### 2.2.1 音乐模块的工作原理
音乐模块通常基于PWM(脉冲宽度调制)技术,通过改变输出的脉冲宽度,来控制声音的频率和音量,从而生成不同的音调。它通过预设的音乐数据,根据时序驱动扬声器发声。一些音乐模块还支持扩展存储,允许存储更长的音乐数据。
#### 2.2.2 LED跑马灯的驱动方式
LED跑马灯的驱动方式多种多样,但通常分为静态驱动和动态驱动两种。静态驱动是将每一个LED单独控制,直接与单片机的I/O口连接。动态驱动则是利用扫描的方式控制LED,即通过快速切换多个LED的通断来实现跑马灯效果,大大减少了所需的I/O口数量。
#### 2.2.3 外围设备与接口分析
音乐跑马灯系统中的外围设备可能包括音乐模块、LED灯、按键开关等。它们通过接口与51单片机连接。例如,音乐模块可能通过串口与单片机通信,LED灯可能通过GPIO端口进行控制。这些接口的分析有助于更好地了解整个系统的架构,并为后续编程和故障排查提供支持。
### 2.3 音乐跑马灯的工作流程
#### 2.3.1 信号处理流程
音乐信号首先被音乐模块的ADC(模数转换器)捕获,并转换为数字信号,然后通过DSP(数字信号处理)算法进行处理,最终输出到扬声器。同时,音乐的节奏信息被提取出来,并用于控制LED灯的亮灭,以此同步音乐与灯光效果。
#### 2.3.2 系统时序控制
为了确保音乐与LED跑马灯效果同步,系统时序控制至关重要。这通常涉及到定时器的设置,它以音乐节拍为基准,生成精确的时序信号,从而控制LED灯的开关。这个过程需要高度的精准和稳定性,以确保用户体验。
```c
// 伪代码:定时器中断服务程序
void TimerInterruptService() {
// 检查是否需要切换LED灯状态
if (isTimeToChangeLEDs()) {
// 更新LED灯状态以匹配音乐节奏
updateLEDsAccordingToMusicRhythm();
}
}
```
以上代码展示了在定时器中断服务程序中更新LED灯状态以匹配音乐节奏的基本逻辑。这需要在程序中设置精确的时间检查点,并在适当的时候切换LED灯的状态。
```mermaid
graph TD
A[开始] --> B[音乐信号捕获]
B --> C[信号数字转换]
C --> D[数字信号处理]
D --> E[节奏信息提取]
E --> F[时序信号生成]
F --> G[LED灯控制]
```
该流程图展示了音乐信号处理到LED灯控制的基本流程,强调了时序控制在系统中的核心作用。
# 3. 音乐跑马灯的软件设计
## 3.1 程序结构和任务调度
### 3.1.1 模块化设计思路
在设计音乐跑马灯的软件时,模块化设计是一种高效的方法。模块化设计将程序分解成一系列具有特定功能的模块,每个模块独立负责程序中的一个部分。这种结构化设计使得代码易于维护、扩展和复用。
为了实现模块化设计,我们需要对软件需求进行详细分析,明确各个模块的职责。例如,可以将音乐播放、跑马灯控制、用户输入处理等划分为独立的模块。每个模块都设计有清晰的接口,通过这些接口模块之间可以相互通信,实现复杂的功能。
下面是一个简单的模块化结构示例:
```plaintext
[音乐播放模块]
|
[跑马灯控制模块]
|
[用户输入处理模块]
```
这样的设计允许我们独立开发和测试每个模块,确保它们能够协同工作,共同完成音乐跑马灯的全部功能。
### 3.1.2 实时操作系统(RTOS)在51单片机中的应用
为了提升音乐跑马灯的性能和响应速度,使用实时操作系统(RTOS)可以是一种有效手段。RTOS专门针对需要快速响应外部事件的应用而设计,它能高效地管理任务调度、同步和通信。
在51单片机上实现RTOS,我们可以使用如FreeRTOS这样的开源解决方案。RTOS可以支持多个任务同时运行,通过时间片轮转调度或优先级调度算法来管理任务执行顺序。通过使用RTOS,音乐播放、跑马灯控制等任务可以被创建为单独的线程,它们将获得合理的时间片来执行,不会相互干扰。
下面是一个RTOS任务调度的简单示例:
```c
void vTaskFunction(void *pvParameters) {
// 任务代码
}
int main() {
// 初始化硬件、RTOS等
// 创建任务
xTaskCreate(vTaskFunction, "Task1", STACK_SIZE, NULL, TASK_PRIORITY, NULL);
xTaskCreate(vTaskFunction, "Task2", STACK_SIZE, NULL, TASK_PRIORITY, NULL);
// 启动RTOS调度器
vTaskStartScheduler();
while(1) {
// 通常不会执行到这里
}
}
```
在这个例子中,创建了两个任务,并将它们添加到RTOS的任务列表中,RTOS会负责任务的调度与执行。
## 3.2 音乐播放的算法实现
### 3.2.1 音频数据的解码过程
音乐播放功能的核心在于音频数据的解码过程。解码器负责将存储在单片机中的音频文件(如WAV、MP3格式)解码为可以播放的模拟信号。音频数据通常会存储为一系列的采样值,每个采样值对应模拟信号中的一个点。
在解码过程中,首先需要读取音频文件的头部信息,获取采样率、位深、声道数等参数。然后,按照这些参数对音频数据进行解析,提取出实际的音频采样数据。采样数据可以进一步通过数字到模拟转换器(DAC)进行转换,或者使用PWM(脉冲宽度调制)技术模拟出模拟信号。
下面是一个简化的音频解码流程的伪代码:
```c
void decodeAudioData(uint8_t* audioData, int fileSize) {
// 读取音频文件头部信息
// 解析采样率、位深、声道数等参数
// 循环读取音频数据中的采样点
for(int i = 0; i < fileSize; i += SAMPLE_SIZE) {
// 提取音频采样点
int sample = readAudioSample(audioData, i);
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
脉冲宽度调制(PWM)在负载调制放大器中的应用:实例与技巧

# 1. 脉冲宽度调制(PWM)基础与原理
脉冲宽度调制(PWM)是一种广泛应用于电子学和电力电子学的技术,它通过改变脉冲的宽度来调节负载上的平均电压或功率。PWM技术的核心在于脉冲信号的调制,这涉及到开关器件(如晶体管)的开启与关闭的时间比例,即占空比的调整。在占空比增加的情况下,负载上的平均电压或功率也会相
【SpringBoot日志管理】:有效记录和分析网站运行日志的策略
# 1. SpringBoot日志管理概述
在当代的软件开发过程中,日志管理是一个关键组成部分,它对于软件的监控、调试、问题诊断以及性能分析起着至关重要的作用。SpringBoot作为Java领域中最流行的微服务框架之一,它内置了强大的日志管理功能,能够帮助开发者高效地收集和管理日志信息。本文将从概述SpringBoot日志管理的基础
数据库备份与恢复:实验中的备份与还原操作详解

# 1. 数据库备份与恢复概述
在信息技术高速发展的今天,数据已成为企业最宝贵的资产之一。为了防止数据丢失或损坏,数据库备份与恢复显得尤为重要。备份是一个预防性过程,它创建了数据的一个或多个副本,以备在原始数据丢失或损坏时可以进行恢复。数据库恢复则是指在发生故障后,将备份的数据重新载入到数据库系统中的过程。本章将为读者提供一个关于
【信号处理技巧】:MATLAB小波分析在地基沉降预测模型中的运用

# 1. MATLAB小波分析概述
小波分析是一种多尺度的信号分析方法,它能提供时间和频率信息,克服了傅里叶变换在处理非平稳信号方面的局限性。MATLAB提供了强大的小波分析工具箱,使得研究人员能够在信号处理、图像处理和数据分析等领域中轻松地进行小波变换和分析。本章将简要介绍MATLAB小波分析的基本概念、工具箱以及它的主要应用领域。通过本章的学习,读者将获得对MATLAB小波分析的初步认识,并为进一步深入了解和实
编程深度解析:音乐跑马灯算法优化与资源利用高级教程
# 1. 音乐跑马灯算法的理论基础
音乐跑马灯算法是一种将音乐节奏与视觉效果结合的技术,它能够根据音频信号的变化动态生成与之匹配的视觉图案,这种算法在电子音乐节和游戏开发中尤为常见。本章节将介绍该算法的理论基础,为后续章节中的实现流程、优化策略和资源利用等内容打下基础。
## 算法的核心原理
音乐跑马灯算法的核心在于将音频信号通过快速傅里叶变换(FFT)解析出频率、
【制造业时间研究:流程优化的深度分析】
# 1. 制造业时间研究概念解析
在现代制造业中,时间研究的概念是提高效率和盈利能力的关键。它是工业工程领域的一个分支,旨在精确测量完成特定工作所需的时间。时间研究不仅限于识别和减少浪费,而且关注于创造一个更为流畅、高效的工作环境。通过对流程的时间分析,企业能够优化生产布局,减少非增值活动,从而缩短生产周期,提高客户满意度。
在这一章中,我们将解释时间研究的核心理念和定义,探讨其在制造业中的作用和重要性。通过
Python编程风格
# 1. Python编程风格概述
Python作为一门高级编程语言,其简洁明了的语法吸引了全球众多开发者。其编程风格不仅体现在代码的可读性上,还包括代码的编写习惯和逻辑构建方式。好的编程风格能够提高代码的可维护性,便于团队协作和代码审查。本章我们将探索Python编程风格的基础,为后续深入学习Python编码规范、最佳实践以及性能优化奠定基础。
在开始编码之前,开发者需要了解和掌握Python的一些核心
Vue组件设计模式:提升代码复用性和可维护性的策略
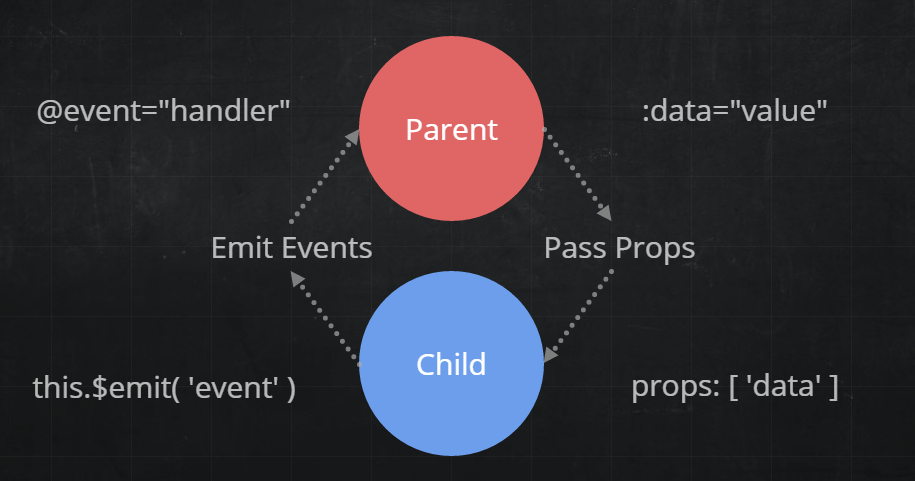
# 1. Vue组件设计模式的理论基础
在构建复杂前端应用程序时,组件化是一种常见的设计方法,Vue.js框架以其组件系统而著称,允许开发者将UI分成独立、可复用的部分。Vue组件设计模式不仅是编写可维护和可扩展代码的基础,也是实现应用程序业务逻辑的关键。
## 组件的定义与重要性
组件是Vue中的核心概念,它可以封装HTML、CSS和JavaScript代码,以供复用。理解
【电子密码锁用户交互设计】:提升用户体验的关键要素与设计思路

# 1. 电子密码锁概述与用户交互的重要性
## 1.1 电子密码锁简介
电子密码锁作为现代智能家居的入口,正逐步替代传统的物理钥匙,它通过数字代码输入来实现门锁的开闭。随着技术的发展,电子密码锁正变得更加智能与安全,集成指纹、蓝牙、Wi-Fi等多种开锁方式。
## 1.2 用户交互
直播推流成本控制指南:PLDroidMediaStreaming资源管理与优化方案
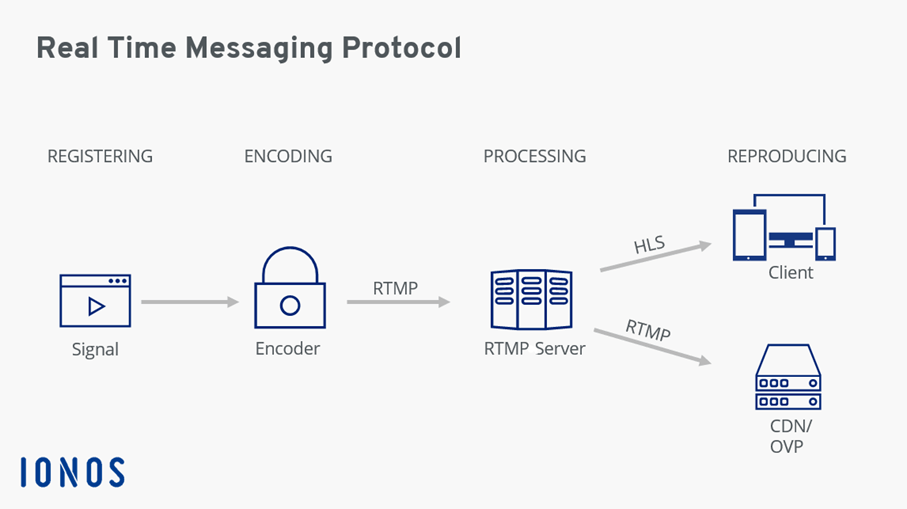
# 1. 直播推流成本控制概述
## 1.1 成本控制的重要性
直播业务尽管在近年来获得了爆发式的增长,但随之而来的成本压力也不容忽视。对于直播平台来说,优化成本控制不仅能够提升财务表现,还能增强市场竞争力。成本控制是确保直播服务长期稳定运
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )