CANoe 12.0 CAPL编程精讲:从基础到高级的编程进阶
发布时间: 2025-01-03 18:47:09 阅读量: 8 订阅数: 12 

# 摘要
CAPL(CAN Application Programming Language)是专门用于开发和测试CAN(Controller Area Network)网络应用程序的语言。本文首先概述了CAPL的基础知识,包括语法结构和数据类型,进而深入介绍了CAPL脚本与CAN协议交互的方法,以及在测试与仿真中的应用。文章还探讨了CAPL在实现高级数据结构、用户界面设计及集成外部程序和数据库方面的技术。最后,通过具体的项目案例分析,本文展现了CAPL在实际汽车电子开发项目中的应用、自动化测试框架的构建和对行业标准的影响。本文旨在为读者提供CAPL编程的全面知识体系,以及它在汽车电子领域的实际应用和最佳实践。
# 关键字
CAPL编程;CAN协议;模块化编程;脚本调试;自动化测试;汽车电子开发
参考资源链接:[CANoe 12.0基础操作指南:通道设置与CAN报文管理](https://wenku.csdn.net/doc/osk1iv9rsn?spm=1055.2635.3001.10343)
# 1. CAPL编程基础概述
CAPL(CAN Access Programming Language)是一种专门用于Vector软件工具链中的CANoe和CANalyzer应用程序开发的脚本语言。它允许开发者创建模拟节点、生成测试数据、自动化测试过程以及监控和分析CAN(Controller Area Network)网络通信。CAPL脚本提供了一种高效的方式来进行车辆网络通信的仿真和测试,特别是在汽车电子领域内,对于测试工程师和系统集成者来说,掌握CAPL语言是必不可少的技能之一。
CAPL编程语言是一种强类型的、面向对象的编程语言,它继承了C/C++语言的一些特性,但同时为了适应CAN网络的特性进行了特别的优化。CAPL的语法简洁、执行效率高,非常适合实时系统开发。在本章节中,我们将探讨CAPL的基础概念、核心语法以及数据类型,为读者深入学习CAPL编程打下坚实的基础。
# 2. CAPL基础语法与数据类型
CAPL(CAN Access Programming Language)是一种专门为CAN(Controller Area Network)总线仿真和测试开发的编程语言。它用于Vector CANoe和CANalyzer这样的工具中,用于创建模拟节点、监控总线通信、以及自动化测试。本章将详细介绍CAPL的基础语法、数据类型、控制流语句、函数与模块化编程等关键概念。
## 2.1 CAPL语法结构简介
CAPL作为一种事件驱动的语言,它的执行流程是由CAN消息事件来驱动的。开发者不需要关注程序从何开始,只需关注事件发生时执行的操作。
### 2.1.1 CAPL脚本的基本组成
CAPL脚本包含多种类型的节点,如消息处理节点、周期性节点以及特定条件下的节点。基本组成如下:
- **头文件** (`#include` 指令): 引入必要的库文件。
- **变量声明** (Variable Declarations): 定义在脚本中使用的变量。
- **函数定义** (Function Definitions): 包括事件处理函数和其他自定义函数。
- **消息处理脚本** (Message Handlers): 当特定消息被接收到时执行的代码块。
- **周期性脚本** (Periodic Scripts): 在设定的时间间隔内周期性执行的代码块。
- **注释** (Comments): 用于解释代码,对理解脚本功能至关重要。
下面是一个简单的CAPL脚本示例:
```capl
// 引入CANoe库
#include <canoe.h>
// 全局变量声明
int count;
// 消息处理函数
on message CarSpeed
{
output("Received car speed message: %d", CarSpeed.speed);
}
// 周期性执行的函数
on timer 1000ms
{
count++;
output("1 second passed. Count: %d", count);
}
```
### 2.1.2 CAPL中的变量声明与数据类型
CAPL支持多种数据类型,如基本类型(`int`, `char`, `float` 等),复合类型(结构体和联合体),以及特殊的CAN相关类型(如`byte`, `word`, `longword`)。每个变量在使用前必须声明,并指定其数据类型。
```capl
// 基本类型的变量声明
int integerVar;
char charVar;
float floatVar;
// 复合类型和CAN相关类型的变量声明
struct MyCar
{
int speed;
char gear;
};
byte busData[8];
```
变量可以在函数内部声明,也可在全局范围声明。全局变量在整个脚本中可用,而局部变量只能在声明它们的函数或代码块中使用。
## 2.2 CAPL函数与模块化编程
### 2.2.1 函数定义与调用
在CAPL中,函数可以像在任何其他编程语言中一样定义和调用。函数定义包括返回类型、函数名以及参数列表。
```capl
// 定义一个函数,返回类型为void,无参数
void myFunction()
{
// 函数体
}
// 调用函数
myFunction();
```
### 2.2.2 模块化编程的优势与实现
模块化编程是将一个复杂系统拆分成多个独立模块的过程。每个模块执行特定的功能,这样可以使代码更容易维护和扩展。
在CAPL中,可以创建多个脚本文件(.csl),每个文件可以看作是一个模块。通过使用`#include`指令,可以在一个脚本文件中包含其他文件的内容。这种方式有助于逻辑上的分离和重用代码。
例如,有三个文件:
- **main.csl**: 包含主函数和程序入口。
- **carSpeedMonitor.csl**: 包含处理车辆速度消息的函数和逻辑。
- **sensorDataProcess.csl**: 包含处理传感器数据的函数和逻辑。
通过在`main.csl`中包含其他两个文件,它们的功能将在主程序中可用。
## 2.3 CAPL的控制流语句
### 2.3.1 条件语句的应用
CAPL提供了标准的条件语句,如`if`、`else`、`switch`等,用于基于条件执行不同的代码块。
```capl
// 条件语句使用示例
if (CarSpeed.speed > 100)
{
output("Speed is over 100 km/h.");
}
else if (CarSpeed.speed > 50)
{
output("Speed is over 50 km/h.");
}
else
{
output("Speed is below 50 km/h.");
}
```
### 2.3.2 循环语句的使用场景
CAPL同样支持循环语句,包括`for`、`while`和`do-while`循环,用于重复执行代码直到满足某个条件。
```capl
// 循环语句使用示例
for (int i = 0; i < 10; i++)
{
output("Loop iteration: %d", i);
}
```
这些循环语句在需要多次处理相同消息或数据时非常有用。
在本章节中,我们介绍了CAPL的基本语法结构、变量声明与数据类型,函数定义与调用,以及控制流语句的应用。通过这些基础知识,读者将能够在接下来的章节中深入掌握CAPL脚本的高级特性和实践应用。
# 3. CAPL脚本深入实践
在前面的章节中,我们已经了解了CAPL编程的基础知识,包括CAPL的基本语法结构、数据类型以及控制流语句。本章节将深入探讨如何将CAPL脚本应用于实际的CAN协议交互、测试与仿真中,并分享一些在编写、调试和优化CAPL脚本时的实践经验。
## 3.1 CAPL与CAN协议交互
CAPL编程语言在Vector CAN工具链中扮演了重要的角色,特别是在与CAN总线的交互方面。它支持直接访问CAN消息,并能够模拟各种CAN节点的行为,这对于开发和测试汽车电子控制单元(ECU)来说至关重要。
### 3.1.1 CAN消息的发送与接收
在CAPL中发送和接收CAN消息是最基本的操作,通过编写简单的脚本就能实现这些功能。下面是一个发送CAN消息的示例代码:
```capl
variables
{
message CANMessage1; // 定义CAN消息变量
}
on start
{
CANMessage1.id = 0x123; // 设置消息ID
CANMessage1.byte(0) = 0xFF; // 设置数据字节
output(CANMessage1); // 发送消息
}
on message CANMessage1
{
write("Received CANMessage1 with ID 0x%X", CANMessage1.id);
}
```
在此示例中,我们首先定义了一个CAN消息变量`CANMessage1`,然后在`on start`事件中设置了该消息的ID和数据,并通过`output()`函数发送了该消息。同时,我们还定义了`on message`事件来响应接收到的`CANMessage1`消息。
**逻辑分析及参数说明:**
- `variables`块中定义了所有需要在脚本中使用的变量。
- `on start`事件在脚本启动时触发,用于初始化操作。
- `CANMessage1.id`和`CANMessage1.byte(0)`分别设置了CAN消息的ID和数据字节。
- `output(CANMessage1)`函数是发送消息的核心函数。
### 3.1.2 信号处理与数据转换
处理CAN消息中的信号,尤其是将原始数据转换为实际的工程单位是CAPL脚本中另一个重要的应用。这通常涉及到位操作和数值转换。下面是一个信号处理的示例:
```capl
on message CANMessage2
{
int signalValue = this.byte(0) << 8; // 获取数据字节
signalValue += this.byte(1); // 合并第二个字节
real signalInMeters = signalValue * 0.1; // 将整数值转换为米(单位转换)
write("Signal in meters: %f", signalInMeters);
}
```
在这个示例中,我们从CAN消息的两个字节中提取出一个16位的整数值,然后通过乘以一个比例因子将该整数值转换为实际的距离(单位为米)。
**逻辑分析及参数说明:**
- `this.byte(n)`访问当前消息中的数据字节。
- 使用位操作将两个字节合并为一个16位的整数。
- 通过乘以一个转换因子将整数值转换为距离。
## 3.2 CAPL在测试与仿真中的应用
CAPL脚本是Vector CAN工具链中进行自动化测试和仿真不可或缺的一部分。它允许开发者和测试工程师编写详细的测试用例和仿真逻辑。
### 3.2.1 测试用例的编写与执行
编写测试用例是确保ECU软件质量的关键步骤。CAPL可以用来模拟外部输入和执行复杂的测试序列。以下是编写测试用例的一个例子:
```capl
variables
{
long counter;
}
on start
{
counter = 0;
}
on timer 1s
{
counter++;
if(counter < 10)
{
// 模拟发送CAN消息
output(CANMessage3);
}
else
{
stopTest(); // 测试结束
}
}
```
在这个测试脚本中,我们使用了一个计数器来模拟一段时间内发送CAN消息的动作,并在达到10次后自动结束测试。
**逻辑分析及参数说明:**
- `on timer`事件用于周期性地执行代码,这里是每秒执行一次。
- `counter`变量用于记录消息发送的次数。
- `stopTest()`函数用于停止当前正在执行的测试。
### 3.2.2 仿真环境的搭建与管理
构建仿真环境是将ECU置于虚拟的车辆网络中进行测试的过程。CAPL脚本可以模拟真实世界中的各种情况,并提供对ECU的控制。下面是一个简单的仿真环境搭建的例子:
```capl
variables
{
int vehicleSpeed = 0; // 车辆速度
}
on message StartSimulation
{
// 初始化仿真环境
initSimEnvironment();
}
on message SetVehicleSpeed
{
vehicleSpeed = msg.byte(0) * 5; // 设置车辆速度(单位:km/h)
write("Vehicle speed is set to %d km/h", vehicleSpeed);
}
// 仿真环境初始化函数
void initSimEnvironment()
{
// 设置仿真环境的初始参数
// ...
}
```
**逻辑分析及参数说明:**
- `on message`事件用于响应特定的CAN消息。
- `initSimEnvironment()`函数用于初始化仿真环境。
- `vehicleSpeed`变量用于存储车辆速度状态,它通过读取CAN消息来更新。
## 3.3 CAPL脚本的调试与优化技巧
调试和优化CAPL脚本是提高开发效率和软件质量的重要环节。下面将分享一些CAPL脚本的调试工具和方法,以及性能优化实践。
### 3.3.1 调试工具与方法
CAPL提供了一系列内置的调试工具和方法,允许开发者在仿真过程中追踪和分析程序的行为。
```capl
variables
{
int debugFlag = 1; // 开启调试标志
}
on message CANMessage4
{
if(debugFlag == 1)
{
write("Message received. Data: %d", this.byte(0));
}
}
// 在CAPL调试器中设置断点
void setDebugBreakpoint()
{
setBreakpoint("on message CANMessage4");
}
```
**逻辑分析及参数说明:**
- `write()`函数可以输出调试信息到CAPL调试窗口。
- `setBreakpoint()`函数在指定位置设置断点,这样可以暂停程序执行以便于分析问题所在。
### 3.3.2 脚本性能优化实践
在编写CAPL脚本时,性能优化是提高脚本效率的关键。以下是一些性能优化的实践建议:
```capl
variables
{
message CANMessage5 msg; // 定义消息变量以减少内存分配开销
}
on message CANMessage5
{
if(receiveCANMessage(msg.id, &msg) == 1)
{
// 处理消息
processCANMessage(msg);
}
}
```
**逻辑分析及参数说明:**
- 预定义消息变量可以减少内存分配和回收的次数。
- 使用`receiveCANMessage()`函数直接在消息ID上进行过滤,减少不必要的消息处理。
请注意,以上示例代码和逻辑分析是按照所给目录大纲结构进行展开的。在实际的开发环境中,你可能需要根据具体的协议和需求,结合Vector工具链的其它工具(如CANoe、CANalyzer等)来编写和调试CAPL脚本。在实现复杂功能时,也有可能需要引入更高级的编程结构和算法。
# 4. CAPL高级编程技术
在第三章中,我们已经了解了CAPL脚本在与CAN协议交互、测试与仿真中的应用,以及调试与优化的一些技巧。本章将进入CAPL编程的更高级阶段,探讨高级数据结构与算法的实现、用户界面的自定义,以及集成外部程序与数据库的关键技术。
## 4.1 高级数据结构与算法实现
### 4.1.1 复杂数据结构的应用
在CAPL中,除了基本数据类型外,还可以使用结构体(struct)和联合体(union)等高级数据结构。这些数据结构能够帮助我们更加高效地组织和管理数据。
在实际应用中,复杂数据结构可以用来模拟车辆网络中的一些复杂数据关系,例如:
```capl
struct CarStatus {
float temperature;
int speed;
bit[16] diagnosticData;
};
```
结构体`CarStatus`包含了温度、速度和诊断数据。通过结构体,我们能够将这些数据组织在一起,方便后续处理。由于篇幅限制,这里仅展示了一个简单的例子,但在实际项目中,结构体的嵌套和复杂度可以根据需求进行相应设计。
### 4.1.2 算法在CAPL中的实现案例
CAPL作为一种脚本语言,同样可以实现复杂的算法逻辑。以一个简单的排序算法为例:
```capl
int numbers[] = {3, 1, 4, 1, 5, 9, 2, 6, 5};
void sortArray(int array[], int size) {
for (int i = 0; i < size - 1; i++) {
for (int j = i + 1; j < size; j++) {
if (array[i] > array[j]) {
int temp = array[i];
array[i] = array[j];
array[j] = temp;
}
}
}
}
// 调用排序函数
sortArray(numbers, 9);
// 输出排序结果
for (int i = 0; i < 9; i++) {
write("numbers[%d] = %d\n", i, numbers[i]);
}
```
上述代码演示了一个典型的冒泡排序算法的实现,展示了如何在CAPL中处理数组元素的比较和交换,进而完成排序过程。通过算法的实现,可以增加CAPL脚本处理复杂数据和执行复杂逻辑的能力。
## 4.2 用户界面与交互
### 4.2.1 自定义用户界面
CAPL提供了强大的图形用户界面(GUI)支持。用户可以通过CAPL定义窗口、按钮、文本框等界面元素,并通过事件驱动的编程模式响应用户的交互动作。
```capl
// 创建一个简单的对话框
dialog MyDialog {
vertical {
label "Hello, World!";
button "Press Me";
}
};
// 在CAN消息处理函数中显示对话框
on message CAN1, 0x123 {
MyDialog.show();
}
// 定义按钮点击事件处理
on button MyDialog, "Press Me" clicked {
write("Button clicked!");
}
```
通过上述代码,我们可以创建一个简单的对话框,并在接收到CAN消息时显示它。当用户点击按钮时,会在输出窗口中打印一条消息。这展示了如何将用户界面与事件处理结合起来。
### 4.2.2 事件处理与响应机制
事件驱动编程是CAPL用户界面的核心。在用户与界面交云时,CAPL能够捕捉到各种事件,并触发相应的事件处理函数。这不仅包括按钮点击,还包括窗口关闭、键盘输入等多种事件。
```capl
// 定义窗口关闭事件处理
on window MyDialog, closed {
write("Dialog closed.");
}
```
当用户关闭对话框时,事件处理函数将执行,输出"Dialog closed."。通过这种方式,CAPL能够提供丰富的交互体验,并对用户的操作进行即时响应。
## 4.3 集成外部程序与数据库
### 4.3.1 调用外部程序的方法与实践
CAPL允许开发者调用外部程序来扩展其功能。例如,使用CAPL调用命令行工具或执行脚本语言编写的程序。这一功能能够将CAPL脚本与其他编程环境或工具链集成在一起,形成更为强大的测试或仿真环境。
```capl
// 在CAPL中调用外部Python脚本
string pythonExe = "C:\\Python39\\python.exe";
string scriptPath = "C:\\scripts\\myscript.py";
string command = "\"%1\" \"%2\"".format(pythonExe, scriptPath);
int result = system(command);
```
上述代码中,`system()`函数调用了一个外部的Python脚本。这里需要确保Python解释器的路径及Python脚本的路径正确无误。通过这种方式,可以将CAPL测试与外部自动化脚本结合,以实现更加复杂的功能。
### 4.3.2 数据库交互技术与安全考量
在测试和开发过程中,与数据库的交互往往不可少。CAPL可以连接数据库,并执行查询、插入、更新等操作。但是,数据库操作涉及敏感数据,因此必须注意安全性。
```capl
// 连接数据库示例(使用ODBC)
string dsn = "myDSN"; // 数据源名称
string user = "sa"; // 数据库用户名
string pass = "mypassword"; // 数据库密码
sqlConnect("DSN=%s;UID=%s;PWD=%s;", dsn, user, pass);
// 执行一个简单的数据库查询
string sqlQuery = "SELECT * FROM myTable";
string result = sqlQueryEx(sqlQuery);
// 输出查询结果
write(result);
// 断开数据库连接
sqlDisconnect();
```
在使用数据库时,必须保证数据库连接字符串(DSN)、用户名(UID)和密码(PWD)等敏感信息的安全。务必避免将敏感信息硬编码在脚本中,而应使用配置文件或环境变量等方式管理。在实际应用中,还可以采用加密连接(如TLS/SSL)进一步保护数据传输过程的安全。
通过上述章节内容,我们可以看到CAPL编程不仅仅局限于CAN协议交互和基础的测试仿真,它还能够实现复杂的算法和数据结构操作,以及丰富的用户界面交互和外部程序、数据库的集成。在汽车电子开发的各个阶段,CAPL以其灵活性和强大的功能,为开发者提供了一个强大的工具集,以实现高效和可靠的开发流程。
# 5. CAPL项目案例分析与实战
在前几章中,我们深入学习了CAPL编程的基础知识、脚本深入实践以及高级编程技术。现在,让我们将这些知识应用到实际的项目案例中,通过案例分析和实战演练来深化理解,并探究CAPL在汽车电子开发中的重要作用。
## 5.1 典型案例分析
### 5.1.1 实际项目中的CAPL应用
CAPL在实际项目中的应用非常广泛,尤其是在汽车电子行业的嵌入式系统测试中。例如,在一个典型的项目中,我们可能需要对ECU(电子控制单元)进行功能测试和验证。
一个案例是在ABS(防抱死刹车系统)ECU的测试中,使用CAPL脚本来模拟车辆动态和环境条件。以下是一个简单的CAPL脚本片段,用于模拟车辆速度变化并触发ABS ECU的操作:
```capl
variables
{
message 100; // CAN消息定义
}
on start
{
setTimer("sendSpeedMessage", 100); // 每100毫秒发送一次消息
}
on timer "sendSpeedMessage"
{
// 假设message 100的DLC(数据长度代码)为8
// 并且第一字节用来表示速度
message.dlc = 8;
message.byte(0) = (rand() % 255); // 随机速度值,范围0-255 km/h
output(message); // 发送CAN消息
}
```
在上述代码中,我们定义了一个定时器,每100毫秒发送一条CAN消息,并在消息中填充随机生成的速度值来模拟不同的行驶状态。这样的脚本可以用来触发ABS系统的响应,并验证其功能是否按预期工作。
### 5.1.2 问题诊断与解决方案
在使用CAPL进行项目测试时,不可避免地会遇到一些问题。例如,在上述ABS ECU测试案例中,如果ABS ECU未能正确响应速度变化,可能存在以下问题:
- CAN消息未能正确发送或接收。
- 速度值的模拟范围不正确。
- ABS ECU的软件存在缺陷。
针对这些问题,我们可以采取以下解决方案:
- 检查CAN网络配置和物理连接是否正确。
- 确保CAN消息格式与ABS ECU的期望格式一致。
- 使用CAPL的调试工具监测CAN消息的实际发送和接收情况。
- 如果问题依然存在,则需要与ABS ECU的开发团队合作,共同诊断和解决问题。
## 5.2 CAPL自动化测试框架构建
### 5.2.1 测试框架的设计原则
设计一个CAPL自动化测试框架,首先需要遵循几个核心原则:
- **模块化**:将测试用例分解为独立的模块,以便于管理和维护。
- **可重用性**:编写可重用的函数和脚本,减少重复工作。
- **灵活性**:测试框架应易于扩展,以支持未来更多测试需求。
- **报告机制**:实现一个有效的错误报告机制,便于快速定位和解决测试中的问题。
### 5.2.2 实现测试用例的自动化流程
构建测试框架的核心是实现测试用例的自动化流程。以下是一个简化的流程图,描述了CAPL自动化测试用例的执行流程:
```mermaid
graph LR
A[开始测试] --> B[加载测试脚本]
B --> C[初始化测试环境]
C --> D[执行测试步骤]
D -->|每一步| E[记录测试结果]
E --> F{所有步骤完成?}
F -- 是 --> G[生成测试报告]
F -- 否 --> D
G --> H[结束测试]
```
在这个流程中,每个测试步骤都会记录测试结果,如果所有步骤都成功完成,则生成最终的测试报告。这种流程不仅提高了测试的效率,还保证了测试的可追溯性。
## 5.3 CAPL在汽车电子开发中的作用
### 5.3.1 汽车电子行业标准与CAPL
在汽车电子行业,存在着诸多标准和规范,CAPL由于其良好的兼容性和强大的功能,成为了实现这些标准的重要工具。例如,ISO 15765-2协议是汽车诊断通信中常用的标准之一,而CAPL提供了丰富的函数库来支持这类通信。
### 5.3.2 CAPL在研发流程中的地位与影响
在汽车电子的研发流程中,CAPL扮演了多个关键角色:
- **原型测试**:在ECU开发初期,使用CAPL进行快速原型测试。
- **功能验证**:在ECU功能开发完成之后,使用CAPL脚本来进行全面的功能验证。
- **性能测试**:CAPL还可以用来进行性能测试,比如测量消息的响应时间等。
通过这些应用,CAPL极大地提高了研发效率,降低了开发成本,并确保了产品能够达到预期的性能和质量标准。
在本章中,我们通过案例分析和实战演练,深入探讨了CAPL在项目中的实际应用,以及构建自动化测试框架的方法。我们还探讨了CAPL在汽车电子开发中的重要性和它在研发流程中的影响。随着汽车行业对嵌入式系统的要求越来越高,CAPL将继续扮演关键角色,并推动整个行业向前发展。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏“CANoe 12.0软件基本使用”全面介绍了CANoe 12.0软件的各种功能和应用。从界面布局的优化到CAPL编程的深入讲解,再到环境配置、信号和消息处理、故障排查、数据管理和ECU开发的实战指南,该专栏涵盖了CANoe 12.0的所有核心方面。此外,专栏还探讨了CANoe 12.0与Vector Network Analyzer和MATLAB的集成,以及在网络仿真、ADAS测试和自定义诊断服务中的应用。通过深入的分析、实例解读和专家技巧,该专栏为CANoe 12.0用户提供了全面的知识库,帮助他们充分利用该软件的强大功能,提升测试效率和准确性。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【数据安全必修课】:揭秘BitLocker加密下的WIN10系统重装数据恢复黄金策略(权威指南)
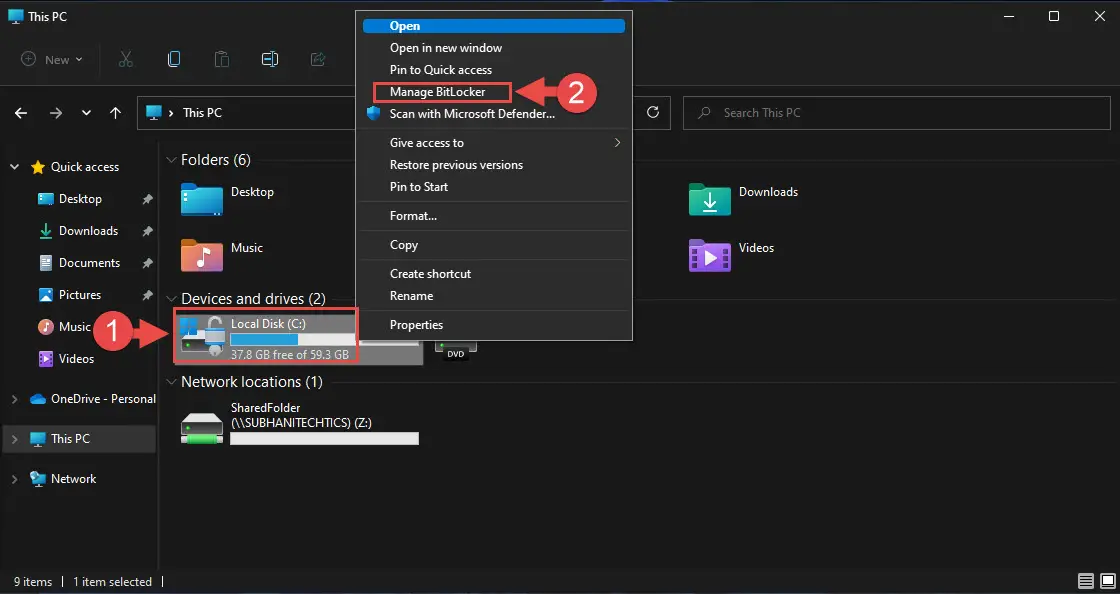
# 摘要
本文系统介绍了数据安全与BitLocker加密技术的概述、机制解析、WIN10系统重装前的数据备份策略、重装过程中的数据保护以及数据恢复黄金策略的实战演练。文章深入探讨了BitLocker的工作原理、部署与配置、以及安全特性,强调了BitLocker在数据备份与系统重装中的关键作用。同时,本文详细阐述了数据备份的重要性和BitLoc
【C语言入门到精通】:掌握10个pta答案,从基础到实战的跨越式成长(一)
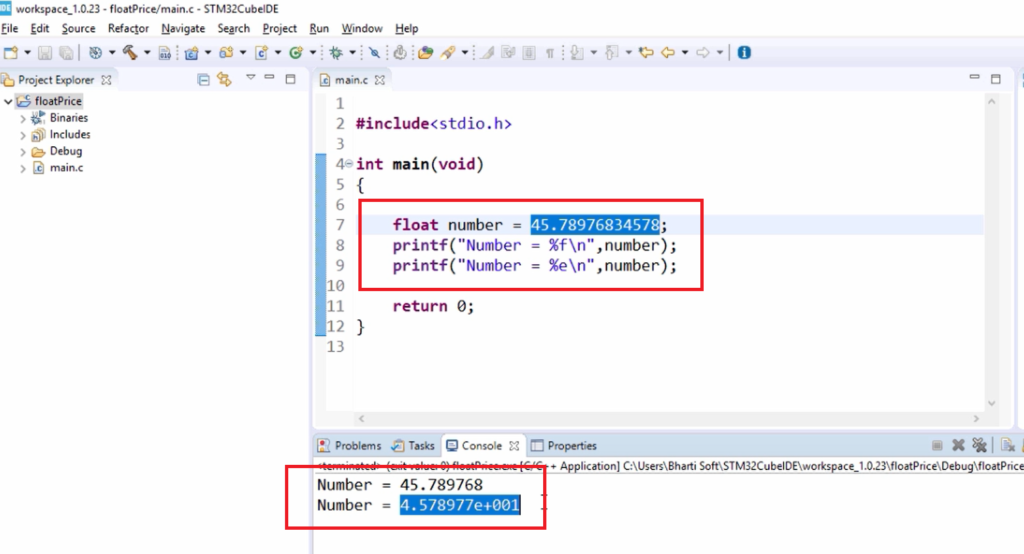
# 摘要
C语言作为一种广泛使用的编程语言,其基础和高级特性的掌握对于软件开发者至关重要。本文从C语言的基础语法讲起,逐步深入到核心语法和高级话题,包括变量、数据类型、运算符、控制结构、函数定义、指针、结构体联合体、动态内存管理以及文件操作和预处理器的使用。随后,文章通过实战演练章节深入浅出地介绍了开发环境的搭建、多种项目案例以及调试、优化和安全编程的最佳实践。本
伯努利滤波器实践课:噪声消减技术的探索之旅(噪音终结者特训营)
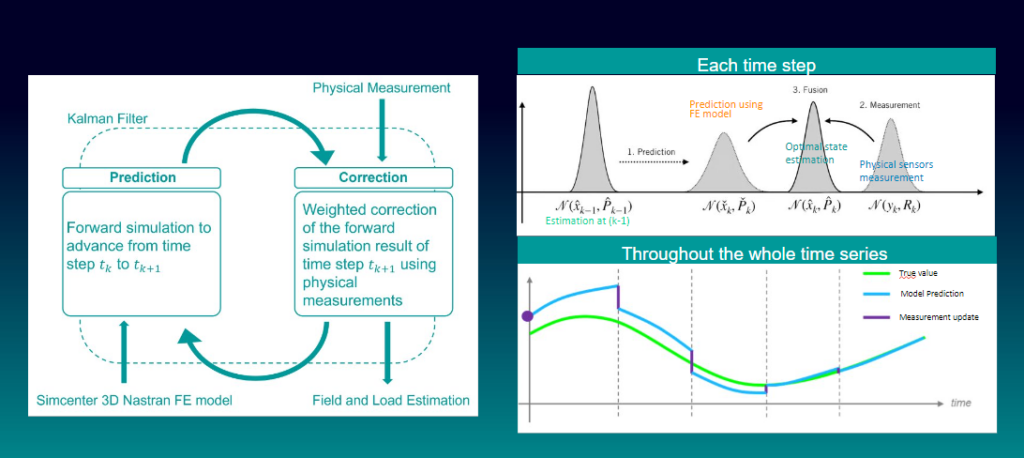
# 摘要
噪声消减技术是提高信号质量的重要手段,尤其在语音和视频处理中起着至关重要的作用。本文首先概述了噪声消减技术的基础知识和应用背景。继而深入探讨了伯努利滤波器的理论基础,包括统计信号处理的基本概念、伯努利分布与过程,以及滤波器的设计原理和工作方式。通过实践章节,我们展示了伯努利滤波器的具体实现步骤、实验环境的
E2000变频器高级使用技巧:性能优化与故障处理

# 摘要
E2000变频器是工业自动化领域广泛应用的设备,本文对其进行全面概述,并详细介绍基础操作、性能优化策略、故障诊断与处理技巧,以及系统集成与网络通信的能力。重点探讨了硬件优化方法和软件参数设置,以提升变频器的运行效率和稳定性。同时,本文还分享了故障诊断的工具与方法,并提出了有效的故障排除和预防措施。此外,系统集成与网络通信章节强调了E2000变频器与上位机的集成及其远程监控与维护功能的
Element-ui el-tree局部刷新:提升用户体验的关键操作(快速解决数据变更问题)

# 摘要
Element-ui的el-tree组件是构建复杂树形结构用户界面的重要工具。本文全面介绍了el-tree组件的基本概念、局部刷新机制、实践操作方法、在实际项目中的应用以及高级功能定制。通过对el-tree组件的基础使用、局部刷新技术的实现和高级定制进行深入分析,本文不仅提供了节点操作与状态管理的最佳实
【坐标转换精通】:ZMap宗海图制作系统投影技术深入解析

# 摘要
本文系统地介绍了ZMap宗海图制作系统中的投影技术,涵盖从坐标转
【环境变量终极指南】:对IT专业人士至关重要的配置解析
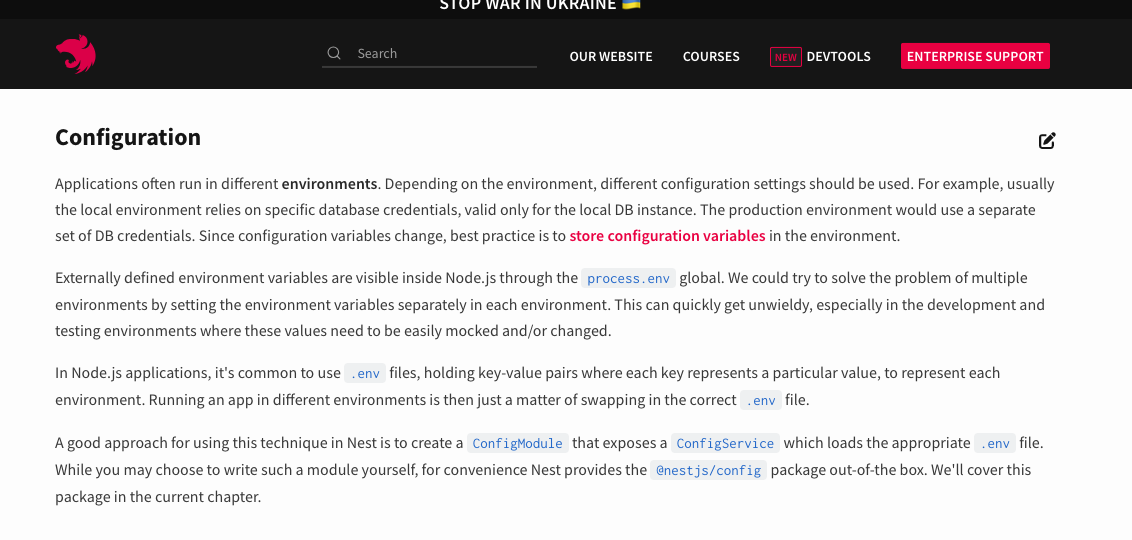
# 摘要
环境变量在软件开发和系统管理中扮演着关键角色,它们影响着程序行为和配置。本文详细介绍了环境变量的基础知识和配置管理方法,包括在不同操作系统中的具体实践,如Unix/Linux和Windows系统的特定配置。同时,探讨
ADS与实际电路对接:理论与实践的无缝融合技术
# 摘要
本论文系统介绍了高级设计系统(ADS)的原理与应用,从基础简介到模拟环境搭建,再到高频与射频微波电路设计的仿真技巧和实践,全面覆盖了ADS在电子工程设计中的关键作用。通过分析信号完整性分析和综合应用案例,本文强调了ADS在电路设计优化中的重要性,并提出了相应的设计优化方法。研究结果表明,ADS能有效辅助工程师解决复杂的电路设计挑
快速掌握Radiant:5个高级操作技巧提高工作效率
# 摘要
本文详细介绍了一款名为Radiant的集成开发环境(IDE)的核心功能及其应用。第一章介绍了Radiant的基本介绍和安装配置方法,第二章涵盖了界面布局和项目管理,强调了个性化定制和高效项目导航的重要性。第三章深入探讨了Radiant的高级编辑功能,包括文本处理、代码片段与模板的使用,以及调试工具。第四章涉及自动化工作流和插件生态,着重于任务自动化和插
【高性能计算可视化】:在ParaView中实现的高级技巧
# 摘要
本文旨在为技术人员提供高性能计算可视化工具ParaView的全面指南。文章从基础理论和安装配置开始,逐步深入探讨数据处理、可视化技术,再到高级应用与实践案例分析。针对大规模数据集的处理技术、自定义过滤器开发及与HPC集群的集成,都提供了详细的策略和解决方案。此外,文章还展望了ParaView的未来发展趋势,讨论了其面临的技术挑战,并强调了开源社区在推动ParaView发展中
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )