控制系统设计中的应用:MATLAB系统识别工具箱深度解读
发布时间: 2024-12-09 22:10:00 阅读量: 11 订阅数: 18 

MATLAB实现SSA-CNN-BiLSTM麻雀算法优化卷积双向长短期记忆神经网络数据分类预测(含完整的程序,GUI设计和代码详解)
# 1. MATLAB系统识别工具箱概述
MATLAB系统识别工具箱是MATLAB软件中的一个重要模块,旨在帮助用户对未知或部分已知的动态系统进行建模和分析。该工具箱集成了多种系统辨识方法,包括但不限于最小二乘法、极大似然法等经典辨识技术,使得用户能够从观测数据中提取系统的动态特性。
系统识别工具箱不仅提供了丰富的函数接口和模型分析工具,还支持用户自定义算法以满足特定问题的需求。在MATLAB环境下,用户可以轻松实现从数据输入到参数估计再到模型验证的整个系统辨识过程。
本章将介绍MATLAB系统识别工具箱的基本功能和使用方法,为后续章节中对工具箱的深入应用打下基础。通过本章的学习,读者将了解到如何利用系统识别工具箱进行基本的系统建模,并熟悉一些核心函数的使用场景。
# 2. ```
# 第二章:系统识别基础理论
在深入探讨MATLAB系统识别工具箱的功能和应用之前,我们需要建立扎实的理论基础。系统识别是一门涉及数据驱动的模型建立和验证的科学,它允许我们通过观测系统的输入和输出数据来推断系统的内部行为和结构。本章将介绍系统识别的数学模型以及辨识的主要方法,为后续章节的详细分析打下基础。
## 2.1 系统识别的数学模型
系统识别的核心是构建数学模型,将观测到的数据转换为可用的信息以理解系统的动态特性。
### 2.1.1 系统辨识的基本概念
系统辨识是数学建模的一个分支,它通过分析系统输入输出数据来确定系统参数或者结构的过程。在控制理论中,一个系统的动态行为可以使用数学模型来描述。这些模型可能是微分方程、传递函数或者状态空间表达式等。系统辨识的目的是使用实验数据来获取这些模型参数或者结构。
### 2.1.2 模型参数估计的数学原理
模型参数估计是系统识别过程中最为关键的一步。它涉及到从输入输出数据中估计模型参数的问题,数学上通常归结为最优化问题。参数估计需要找到一组参数,使得模型输出与实际观测输出之间的误差最小化。误差通常用损失函数来衡量,而最优化过程则通过迭代算法进行,如梯度下降法、牛顿法等。
## 2.2 系统辨识的主要方法
系统辨识的方法多种多样,根据不同的应用背景和数据特性,选择合适的方法至关重要。
### 2.2.1 最小二乘法
最小二乘法是一种基本而强大的参数估计方法。其核心思想是找到一组模型参数,使得模型预测输出与实际观测输出之间的平方和最小化。它适用于线性系统模型的参数估计,且对噪声数据具有较好的鲁棒性。最小二乘法的一个重要特性是其解具有明确的解析表达式。
### 2.2.2 极大似然法
极大似然法是一种基于概率论的参数估计方法。它通过选取模型参数,使得观测到的数据出现的概率最大。当数据遵循特定的概率分布时,极大似然估计具有良好的统计性质,如渐进无偏性和一致性。极大似然法在处理非线性模型和含有噪声的数据时,往往比最小二乘法有更优的表现。
### 2.2.3 模型选择与验证
模型选择与验证是系统识别中不可或缺的环节。模型选择的目的是找到最简单的模型,同时能够很好地解释数据。模型验证则需要检查所建立模型的预测能力,以确保其在实际应用中有效。常用的模型验证方法包括残差分析、交叉验证、AIC和BIC信息准则等。
在接下来的章节中,我们将深入了解如何使用MATLAB系统识别工具箱中的函数和接口来实际应用这些理论,以及如何通过实例操作来加深理解。
```
# 3. MATLAB系统识别工具箱功能介绍
MATLAB系统识别工具箱是工程实践和研究中用于系统建模和参数估计的重要软件包。本章将详细介绍工具箱中的常用函数和接口,并通过实例操作演示如何在数据分析和系统建模中应用这些功能。
## 3.1 常用函数与接口
MATLAB系统识别工具箱提供了一系列函数和接口以支持用户在系统识别过程中完成各种任务。以下是三个主要的类别:
### 3.1.1 系统建模函数
系统建模是系统识别的第一步,MATLAB提供了一些基础和高级的建模函数。例如:
- `tfest`:估计传递函数模型。
- `n4sid`:使用子空间方法进行状态空间模型估计。
- `poly2struc`:将多项式系数转换为结构体形式的传递函数模型。
这些函数通常需要输入数据和模型结构参数,并返回一个模型对象,该对象可以用来进行进一步的分析和验证。
#### 代码块示例
```matlab
% 传递函数模型估计示例
data = iddata(y, u, Ts); % y是系统输出,u是系统输入,Ts是采样时间间隔
model_tf = tfest(data, 2, 2); % 估计一个二阶传递函数模型
```
在这个示例中,`tfest`函数被用来估计一个二阶传递函数模型。`iddata`函数用于创建一个离散时间数据集,它包含了系统输入`u`、系统输出`y`和采样时间间隔`Ts`。
### 3.1.2 参数估计函数
参数估计是系统识别的核心环节,涉及从输入输出数据中估计模型参数。MATLAB提供了多种参数估计方法:
- `arx`:线性ARX模型估计。
- `armax`:带有外部输入的ARX模型估计。
- `oe`:输出误差模型估计。
这些函数的使用需要对估计方法有深刻理解,以便选择最适合问题场景的方法。
#### 代码块示例
```matlab
% 线性ARX模型估计示例
na = [2 3]; % ARX模型的自回归部分参数
nb = [1 2]; % ARX模型的输入部分参数
model_arx = arx(data, [na nb]); % 估计一个ARX模型
```
在这个示例中,`arx`函数用于估计一个ARX模型。模型参数`na`和`nb`定义了自回归部分和输入部分的阶数。
### 3.1.3 模型验证与分析函数
在完成模型估计后,验证模型是否准确地反映了系统的动态行为至关重要。MATLAB系统识别工具箱提供以下函数用于模型验证与分析:
- `compare`:比较模型和实际输出。
- `resid`:残差分析函数。
- `predict`:模型预测函数。
这些函数帮助用户通过比较、残差分析和预测能力的评估来确认模型的有效性。
#### 代码块示例
```matlab
% 模型比较分析示例
y_model = predict(model_tf, data);
figure;
compare(data, y_model); % 对比模型预测值和实际值
```
在上面的示例中,`compare`函数用于比较模型预测的输出和实际数据集的输出,通过可视化的图形方式,用户可以直观地看到模型预测的准确性。
## 3.2 实例操作与数据分析
在本节中,我们将通过具体的操作实例来展示如何利用MATLAB系统识别工具箱进行数据预处理、系统辨识和模型验证。
### 3.2.1 数据预处理实例
数据预处理是识别过程的第一步,主要目的是准备高质量的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB 系统识别工具箱专栏深入探讨了 MATLAB 中系统识别的基本概念和关键应用。从数据采集到模型验证,本专栏提供了全面的指南,涵盖了动态系统建模、噪声环境下的建模、模型优化策略、信号处理中的应用、自定义函数开发、机器学习集成、并行计算优化、模型可靠性分析、控制系统设计应用、交互式操作增强、模块化设计构建以及模型性能评估。通过深入解析和实际演练,本专栏旨在帮助读者掌握 MATLAB 系统识别工具箱,提升其在系统建模和分析方面的技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
802.3-2022标准速成课:网络性能提升的5大新特性
参考资源链接:[2022年IEEE 802.3 Ethernet标准修订发布:迈向400Gbps新时代](https://wenku.csdn.net/doc/826ovvob34?spm=1055.2635.3001.10343)
# 1. 802.3-2022标准概述
随着信息技术的飞速发展,以太网标准不断演进以满足日益增长的网络需求。在众多标准中,IEEE 802.3-2022代表了当前以太网技术的最新进展。本章节旨在为读者提供802.3-2022标准的概述,为深入探讨其带来的网络性能提升特性、应用实践、面临的管理挑战及其解决方案奠定基础。
## 网络通信的重要性
网络通信已成为现
【技术实践】:提升四人智力竞赛抢答器性能与用户体验的15条策略
参考资源链接:[四人智力竞赛抢答器设计与实现](https://wenku.csdn.net/doc/6401ad39cce7214c316eebee?spm=1055.2635.3001.10343)
# 1. 四人智力竞赛抢答器概述
## 1.1 智力竞赛抢答器的定义
智力竞赛抢答器是一种用于多人参与的问答游戏中的电子设备或软件,旨在为竞赛提供一个公平、快速的抢答机制。它允许参赛者在问题
WebView安全下载:阻止恶意下载的12个策略与实践
参考资源链接:[Android WebView文件下载实现教程](https://wenku.csdn.net/doc/3ttcm35729?spm=1055.2635.3001.10343)
# 1. WebView安全下载概述
在数字时代,随着移动应用的普及,
【Devedit新手入门全攻略】:7天精通Devedit基本使用技巧
参考资源链接:[DevEdit用户手册:Silvaco入门资源指南](https://wenku.csdn.net/doc/1kt96ou135?spm=1055.2635.3001.10343)
# 1. Devedit概览与安装配置
在当代软件开发过程中,高效的开发环境是必不可少的。Devedit作为一个集成开发环境
【KSZ9031PHY芯片全方位攻略】:13个核心技巧,轻松驾驭嵌入式网络设计

参考资源链接:[ksz9031phy芯片技术详解与应用](https://wenku.csdn.net/doc/6471d6fbd12cbe7ec3023cf0?spm=1055.2635.3001.10343)
# 1. KSZ9031PHY芯片概述与市场定位
KSZ9031PHY芯片作为一款
SMBus 3.1协议深度解析:从基础到高级应用的10大关键策略
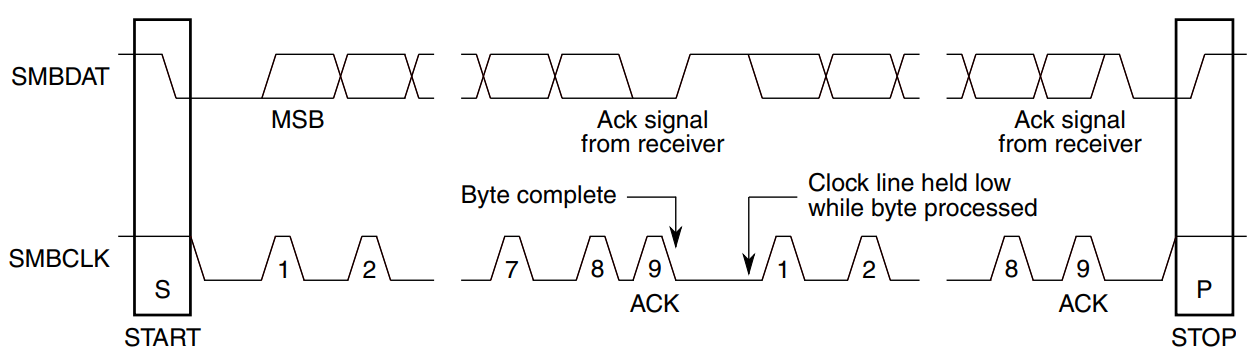
参考资源链接:[SMBus 3.1 规范详解](https://wenku.csdn.net/doc/fmhsgaetqo?spm=1055.2635.3001.10343)
# 1. SMBus 3.1协议基础概述
SMBus 3.1(System Management Bus)是一种广泛应用于计算机系统和嵌入式系统中,用于系统管理信息的双线串行总线。与I²C(Inter-Integra
【Image-Pro Plus 6.0 测量工具精讲】:精确掌握图像测量与分析技巧
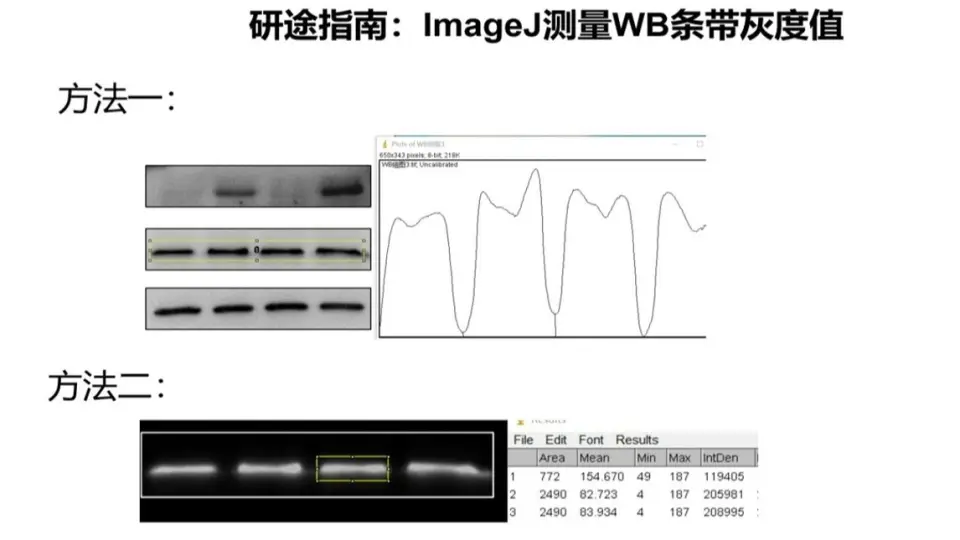
参考资源链接:[Image-Pro Plus 6.0 中文参考指南:专业图像处理教程](https://wenku.csdn.net/doc/769dz24zbq?spm=1055.2635.3001.10343)
# 1. Image-Pro Plus 6.0 基础入门
欢迎来到Image-Pro Plus
SPC5744P芯片手册速查:6大必备功能与特性深度解读
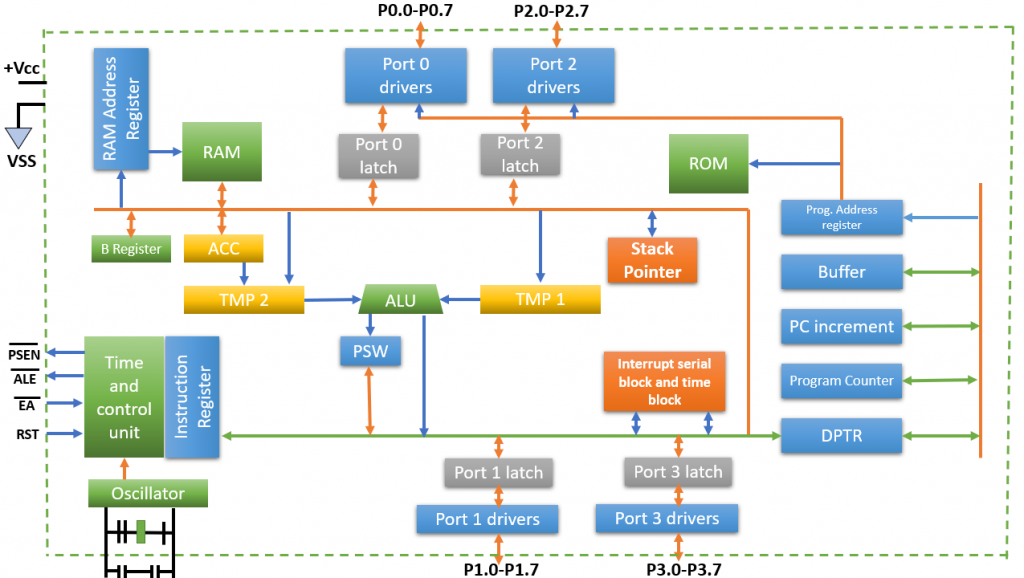
参考资源链接:[MPC5744P芯片手册:架构与功能详解](https://wenku.csdn.net/doc/1euj9va7ft?spm=1055.2635.3001.10343)
# 1. SPC5744P芯片概览
## 1.1 SPC5744P芯片简介
SPC5744P是STMicroelectronics(意法半导体)推出的32位微控制器,属于SPC57x系列,常用于汽车及工业应用中的高性能动力总成控制。它基
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )