跨学科案例研究:MATLAB系统识别工具箱的综合应用
发布时间: 2024-12-09 21:40:16 阅读量: 13 订阅数: 19 

Matlab技术在地理信息系统中的应用案例.docx
# 1. MATLAB系统识别工具箱概述
## 简介
MATLAB系统识别工具箱(System Identification Toolbox)是MathWorks公司为MATLAB环境专门开发的一款强大的工具箱,主要面向工程师和科研人员。它通过提供一系列的函数和图形用户界面(GUI)支持多种系统识别算法,从而帮助用户从数据中提取动态系统模型。
## 功能亮点
该工具箱能够处理线性和非线性模型,支持时域和频域数据,并提供了丰富的模型验证和分析功能。它能够帮助用户快速实现系统建模、模型验证、参数估计以及预测等多个环节,特别适用于控制系统、信号处理以及各种工程领域的数据分析和预测建模。
## 应用场景
无论是在控制系统的优化,还是在动力学系统的分析,亦或是在经济模型的预测中,MATLAB系统识别工具箱都显示了其在数据驱动模型建立方面的优势。此外,该工具箱也广泛应用于教学和科研中,作为理论和实践相结合的重要桥梁。
在深入学习系统识别工具箱前,理解其基本框架和功能至关重要。接下来的章节将详细介绍系统识别的理论基础、MATLAB工具箱在实际应用中的操作方法,以及一些高级功能和未来发展方向。
# 2. 系统识别理论基础
系统识别是现代控制理论中的一项基本技术,它通过采集系统输入输出数据,运用数学方法对系统的特性进行建模,以达到理解和预测系统行为的目的。本章将详细介绍系统识别的理论基础,包括数学模型、主要方法和误差分析。
## 2.1 系统识别的数学模型
在深入讨论系统识别的算法和应用之前,理解所用到的数学模型是必不可少的。本节将分别介绍线性系统模型、非线性系统模型以及模型参数化与估计的数学概念。
### 2.1.1 线性系统模型
线性系统是指系统的输出和输入之间满足叠加原理的系统。数学上,它可以通过线性差分方程或线性微分方程来描述。最简单的线性系统模型是线性常系数差分方程,例如:
\[ y(k) + a_1y(k-1) + \cdots + a_ny(k-n) = b_0u(k) + b_1u(k-1) + \cdots + b_mu(k-m) \]
其中,\( y(k) \) 是在时刻 \( k \) 的输出,\( u(k) \) 是输入,\( a_i \) 和 \( b_i \) 是系统参数。
线性系统的优势在于它可以用频率域的概念来简化分析,比如拉普拉斯变换或傅里叶变换。线性系统模型适用于许多工程和科学领域,如信号处理、控制系统和经济学中的时间序列分析。
### 2.1.2 非线性系统模型
与线性系统相对的是非线性系统,它不能用线性方程来描述。非线性系统模型更加复杂,包括多项式模型、神经网络模型、模糊逻辑模型等。
一个简单的非线性系统可以用如下方程表示:
\[ y(k) = f(y(k-1), y(k-2), ..., u(k), u(k-1), ...) \]
其中 \( f \) 是一个非线性函数。
非线性模型可以更好地描述现实世界中的复杂现象,但它们也带来了更多的数学和计算挑战。
### 2.1.3 模型的参数化与估计
模型参数化是将系统的结构形式化的过程,而模型估计则是从数据中确定这些参数的具体值。参数估计通常涉及最小化观测数据与模型预测值之间的差异。
例如,在线性回归模型中,最小二乘法是一种常用的参数估计技术,它最小化了残差平方和。参数估计过程中,常见问题包括过拟合、模型选择和参数的统计检验。
## 2.2 系统识别的主要方法
系统识别方法可以分为频率域方法和时域方法,其中时域方法更为常见。本小节介绍三种常用的时域方法:最小二乘法、最大似然法、遗传算法和模拟退火。
### 2.2.1 最小二乘法
最小二乘法是一种数学优化技术,用于拟合数据点到模型,使得所有数据点的残差平方和最小。这种方法在系统识别中被广泛使用,特别适用于线性模型。
算法的基本思想是找到一组模型参数,使得观测数据与模型预测值之间的误差平方和最小化。其数学表达为:
\[ \min_{\theta} \sum_{i=1}^{N} (y_i - f(x_i,\theta))^2 \]
其中,\( y_i \) 是观测值,\( x_i \) 是输入,\( \theta \) 是模型参数,\( f \) 是模型函数。
### 2.2.2 最大似然法
与最小二乘法不同,最大似然法是一种概率论方法,它通过最大化观测数据的似然函数来估计模型参数。似然函数是在观测数据下,参数为真实值的概率。
最大似然法要求预先知道观测数据的噪声特性,例如,假设噪声是高斯分布的。因此,它提供了一种统计上更合理的参数估计方法。
### 2.2.3 遗传算法和模拟退火
遗传算法和模拟退火是优化技术中两类重要的启发式搜索方法。它们不依赖梯度信息,适用于求解复杂的非线性优化问题。
遗传算法模拟自然选择和遗传机制,通过迭代地选择、交叉和变异一组解,向最优解进化。模拟退火则是模拟热力学中的退火过程,以概率的形式接受次优解,以避免陷入局部最优。
## 2.3 系统识别的误差分析
系统识别过程中,误差分析是一个不可或缺的部分。这涉及到如何建立误差模型、如何评估和诊断误差以及如何制定误差控制策略。
### 2.3.1 误差模型的建立
误差模型用于描述系统识别过程中误差的来源和特性。一般来说,识别过程中的误差主要来源于噪声、模型误差以及参数估计误差。
一种常用的误差模型是加性误差模型:
\[ y = f(x, \theta) + e \]
其中,\( e \) 表示误差项。
### 2.3.2 误差评估和诊断
误差评估通常涉及计算误差统计量,比如均方误差(MSE)、均方根误差(RMSE)或平均绝对误差(MAE)。这些统计量可以提供误差大小的度量。
诊断则涉及到识别误差来源。例如,如果误差在不同的输入值上有系统性的变化,可能表明模型结构选择不当。
### 2.3.3 误差控制策略
误差控制策略包括减少误差的各种方法,比如数据预处理、使用更复杂的模型结构、采用先进的参数估计方法等。
重要的是在误差控制和模型复杂度之间找到平衡点,因为更复杂的模型往往会导致更小的训练误差,但也可能导致更大的测试误差,这是过拟合的风险。
通过以上章节,我们已经建立了系统识别的基础知识框架。在下一章中,我们将深入探讨MATLAB在系统识别中的应用,包括如何在MATLAB环境中实现线性和非线性系统的辨识,以及对系统模型进行验证和评估的方法。
# 3. MATLAB工具箱在系统识别中的应用
## 3.1 线性系统的辨识
### 3.1.1 使用MATLAB进行线性回归分析
线性回归是系统识别中最基础且应用广泛的方法之一。在MATLAB中,我们可以使用`regress`函数或者`fitlm`函数来实现线性回归分析。下面是`fitlm`的一个简单使用示例:
```matlab
% 示例数据
x = [1, 2, 3, 4, 5];
y = [2, 3.9, 6.1, 8, 10];
% 使用fitlm进行线性回归
lm = fitlm(x, y);
% 查看回归结果
disp(lm);
```
此代码块展示了如何利用MATLAB的`fitlm`函数来拟合一个简单的线性模型。`fitlm`返回的线性模型对象`lm`包含了详细的回归统计信息,包括系数、残差、统计量等。
在进行线性回归分析时,有几点注意事项:
- 数据必须是数值型的,包括响应变量和预测变量。
- 需要检查数据是否有异常值,异常值可能严重影响回归分析的结果。
- 应考虑数据的相关性,如果预测变量间高度相关,可能会导致系数的不准确。
- 需要对模型进行诊断,查看残差是否呈现随机分布。
### 3.1.2 利用MATLAB进行状态空间模型辨识
状态空间模型是描述系统内部动态的一个强大工具。MATLAB提供了一系列工具来识别和分析状态空间模型,例如使用`n4sid`函数可以进行子空间辨识。
```matlab
% 假设已经通过某种方式获取了系统的输入输出数据
% U表示输入矩阵,Y表示输出矩阵
U = [...];
Y = [...];
% 用n4sid函数进行状态空间模型辨识
% 这里假设系统是2阶的,并使用默认选项
sys = n4sid([Y U], 2);
% 分析辨识得到的模型
figure;
compare([Y U], sys);
```
在这段代码中,`n4sid`函数用于辨识状态空间模型。我们传入了输入和输出数据,指定了模型的阶数。然后,使用`compare`函数来比较实际数据和模型输出,以评估模型的准确度。
辨识状态空间模型时要注意以下几点:
- 确定合理的模型阶数对获得好的辨识结果至关重要。
- 输入输出数据的质量直接影响模型的准确性,应进行预处理和清洗。
- 状态空间模型辨识通常需要处理大量的数据,并要求有足够的计算资源。
- 需要对辨识得到的模型进行稳定性分析和参数敏感性分析。
## 3.2 非线性系统的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB 系统识别工具箱专栏深入探讨了 MATLAB 中系统识别的基本概念和关键应用。从数据采集到模型验证,本专栏提供了全面的指南,涵盖了动态系统建模、噪声环境下的建模、模型优化策略、信号处理中的应用、自定义函数开发、机器学习集成、并行计算优化、模型可靠性分析、控制系统设计应用、交互式操作增强、模块化设计构建以及模型性能评估。通过深入解析和实际演练,本专栏旨在帮助读者掌握 MATLAB 系统识别工具箱,提升其在系统建模和分析方面的技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
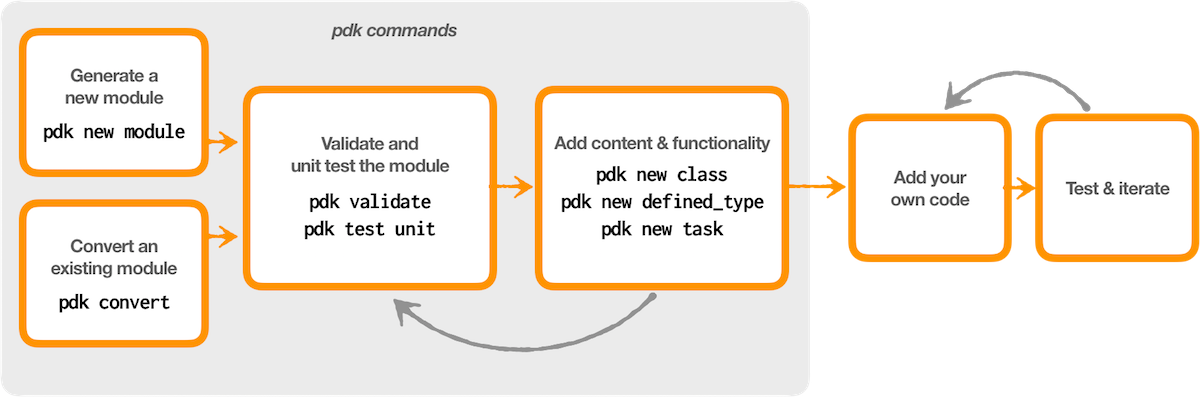
【ASIC设计中PDK应用】:案例分析与实操技巧
参考资源链接:[SMIC 28nm PDK安装与cdl、gds文件导入教程](https://wenku.csdn.net/doc/3r40y99kvr?spm=1055.2635.3001.10343)
# 1. ASIC设计中PDK的概念和重要性
在现代集成电路设计领域,专用集成电路(ASIC)设计是技术先进与市场需求相结合的产物,而设计流程中不可或缺的工具之一便是工艺设计套件(Process Design Kit,简称PD
【SpyGlass规则性能提升秘诀】:专家分享规则优化与调整技巧
参考资源链接:[SpyGlass内置规则参考指南(L-2016.06版)](https://wenku.csdn.net/doc/7twru7ai53?spm=1055.2635.3001.10343)
# 1. SpyGlass规则性能概述
SpyGlass平台中的规则是实现高效安全监控的关键组件。本章将介绍规则性能的基本概念,以及为何规则性能优化对于整体系统响应至关重要。我们将探讨规则
CPCI 2.0技术新手入门指南:5步骤快速掌握并应用

参考资源链接:[CPCI2.0标准规范详解:电气与机械要求](https://wenku.csdn.net/doc/811wfqhweq?spm=1055.2635.3001.10343)
# 1. CPCI 2.0技术简介
随着计算机技术的飞速发展,计算机外设组件互连专业委员会(PCI-SIG)发布的Com
离散数学定理证明速成课:刘玉珍编著的关键技巧与案例

参考资源链接:[离散数学答案(刘玉珍_编著)](https://wenku.csdn.net/doc/6412b724be7fbd1778d493b9?spm=1055.2635.3001.10343)
# 1. 离散数学定理证明概览
## 1.1 离散数学的重要性
在计算机科学与信息科技领域中,离散数学是构建逻辑思维和算法设计的基石。从基
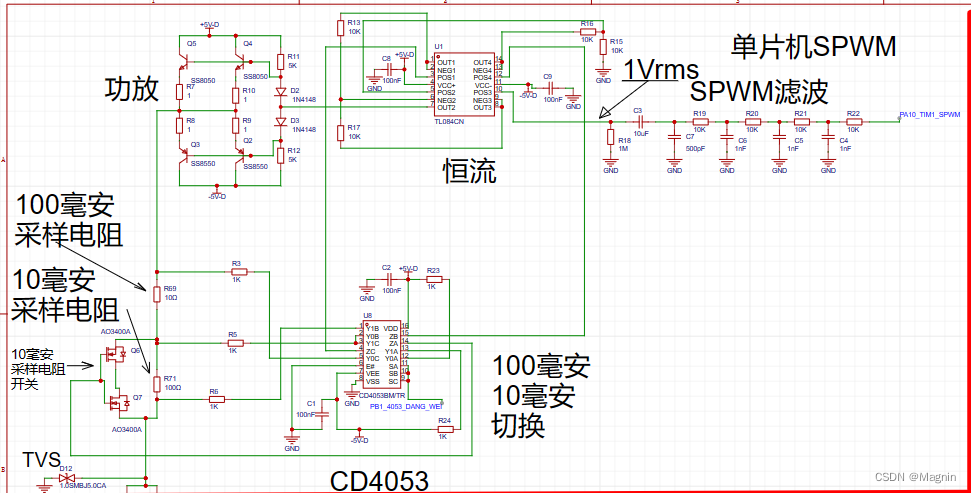
【SPWM波形工具:调试与维护】:故障排除、性能调整与升级策略
参考资源链接:[spwm_calc_v1.3.2 SPWM生成工具使用指南:简化初学者入门](https://wenku.csdn.net/doc/6401acfecce7214c316ede5f?spm=1055.2635.3001.10343)
# 1. SPWM波形工具概述
在现代电力电子技术中,SPWM(正弦脉宽调制)波形工具扮演了至关重要的角色。SPWM技术广泛应用于
【SV660N伺服参数设置详解】:从基础到高级,掌握关键参数调整技巧
参考资源链接:[汇川SV660N伺服调试指南:高性能自动化设备控制](https://wenku.csdn.net/doc/5dwq6jzhf6?spm=1055.2635.3001.10343)
# 1. SV660N伺服驱动器概述
在现代自动化控制系统中,伺服驱动器作为关键的执行元件,其性能直接决定了整个系统的响应速度、定位精度及稳定性。本章旨在为读者提供SV6
【专家破解】:Win7_Win8系统Prolific USB-to-Serial适配器的兼容性终极解决方案

参考资源链接:[Win7/Win8系统解决Prolific USB-to-Serial Comm Port驱动问题](https://wenku.csdn.net/doc/4zdddhvupp?spm=1055.2635.3001.10343)
# 1. Prolific USB-to-Serial适配器基础及问题概述
## 1.1 P
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )